ORSModel¶
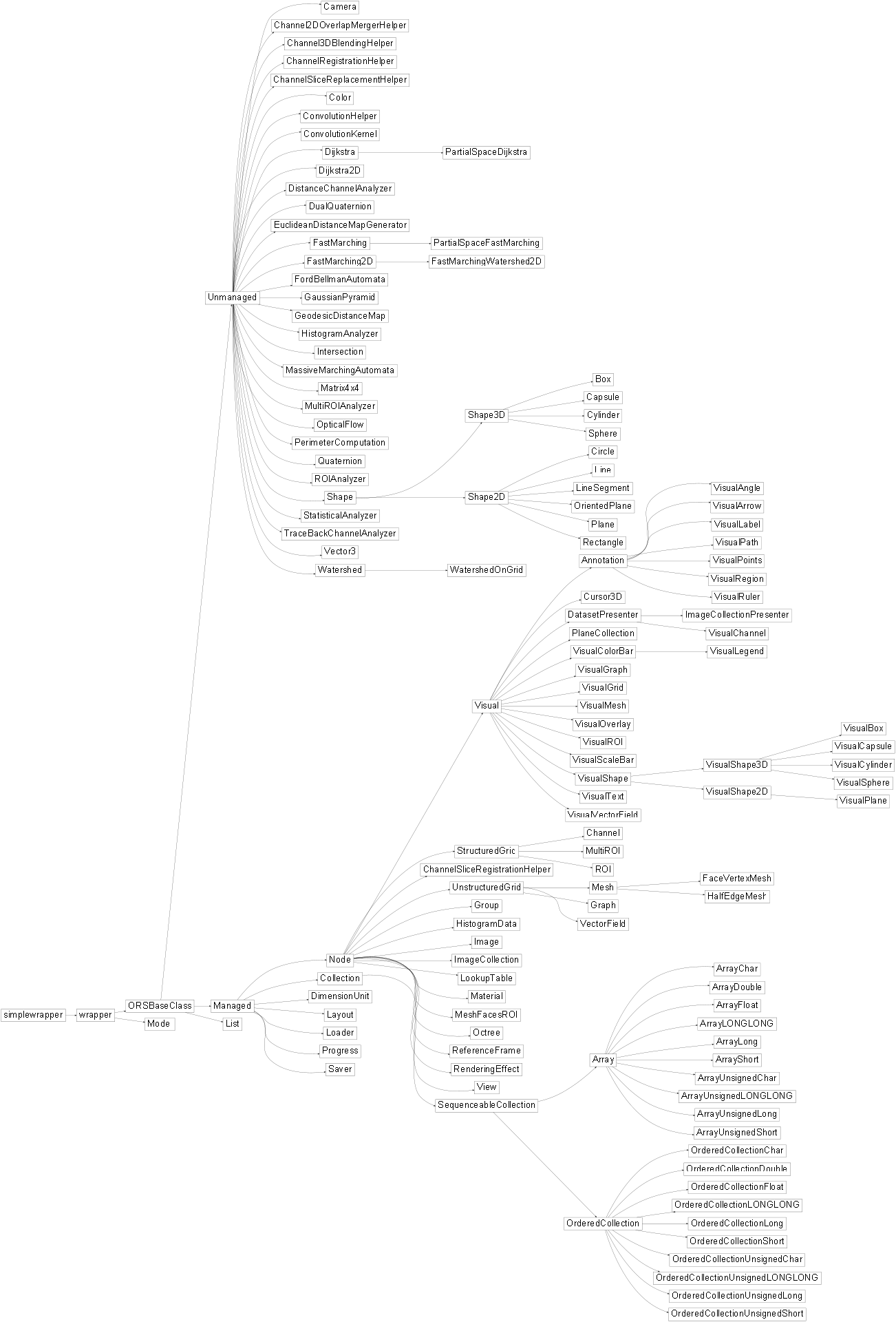
Inheritance diagram¶
Classes¶
Annotation¶
-
class
ORSModel.ors.Annotation¶ Bases:
ORSModel.ors.Visualbrief_description: Represents image annotations. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Aug 2006
-
addControlPoint(self, pPoint: ORSModel.ors.Vector3, iTIndex: int, aWorldTransformMatrix: ORSModel.ors.Matrix4x4) → None¶ Adds a control point.
Note
Any change to a annotation should be followed by update() to reflect the changes visually.
Parameters: - pPoint (ORSModel.ors.Vector3) – a point (a Vector3)
- iTIndex (int) – the T index (an uint32_t)
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) – an optional transformation matrix (a Matrix4x4 or none)
-
addControlPointForAllTimeStep(self, pPoint: ORSModel.ors.Vector3, aWorldTransformMatrix: ORSModel.ors.Matrix4x4) → None¶ method addControlPointForAllTimeStep
Parameters: - pPoint (ORSModel.ors.Vector3) –
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) –
-
addControlPointToHighlighted(self, controlPointIndex: int, iTIndex: int) → None¶ Parameters: - controlPointIndex (int) –
- iTIndex (int) –
-
addControlPointToSelection(self, controlPointIndex: int, iTIndex: int) → None¶ method addControlPointToSelection
Parameters: - controlPointIndex (int) –
- iTIndex (int) –
-
applyTransformation(self, aTransformationMatrix: ORSModel.ors.Matrix4x4, iTIndex: int) → None¶ method applyTransformation
Parameters: - aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- iTIndex (int) –
-
applyTransformationOnAllTimeStep(self, aTransformationMatrix: ORSModel.ors.Matrix4x4) → None¶ method applyTransformationOnAllTimeStep
Parameters: aTransformationMatrix (ORSModel.ors.Matrix4x4) –
-
copyControlPointFrom(self, aControlPointCollection: ORSModel.ors.OrderedCollectionDouble, iTIndex: int) → None¶ method copyControlPointFrom
Parameters: - aControlPointCollection (ORSModel.ors.OrderedCollectionDouble) –
- iTIndex (int) –
-
duplicateTimeStepDataAcrossAllTimeSteps(self, iTIndex: int) → None¶ Duplicate Time Step Data Across All Time Steps.
Parameters: iTIndex (int) – the T index (an uint32_t)
-
get3DThickness(self) → float¶ Gets the thickness of lines in 3D mode.
Returns: output (float) – the thickness, in screen proportion (a double between 0 and 1)
-
getAsROI(self, iTIndex: int, worldTransform: ORSModel.ors.Matrix4x4, pOutputROI: ORSModel.ors.ROI) → None¶ Makes a Region of Interest from the annotation.
Parameters: - iTIndex (int) – the T index (an uint32_t)
- worldTransform (ORSModel.ors.Matrix4x4) – an optional transformation matrix (a Matrix4x4 or none())
- pOutputROI (ORSModel.ors.ROI) – the output ROI where results are to be written (a ROI)
-
getAsROIForAllTimeStep(self, worldTransform: ORSModel.ors.Matrix4x4, pOutputROI: ORSModel.ors.ROI) → None¶ Parameters: - worldTransform (ORSModel.ors.Matrix4x4) –
- pOutputROI (ORSModel.ors.ROI) –
-
getAutoCaption(self) → bool¶ method getAutoCaption
Returns: output (bool) –
-
getCaption(self) → str¶ method getCaption
Returns: output (str) –
-
getCaptionTextFontName(self) → str¶ getCaptionTextFontName
Returns: output (str) –
-
getCaptionTextFontSize(self) → float¶ Gets the font size of text captions, in screen one thousandths.
Returns: output (float) – the font size (a double between 0 and 1)
-
getCaptionTextMinimumFontSize(self) → int¶ Gets the minimum font size of text captions, in font points.
Returns: output (int) – the font size
-
getCentroid(self, iTIndex: int, worldTransform: ORSModel.ors.Matrix4x4) → Vector3¶ Gets the World centroid of the annotation.
Parameters: - iTIndex (int) –
- worldTransform (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Vector3) – The centroid vector
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getControlPointAppearance(self) → int¶ Gets the control point appearance.
Returns: output (int) – The appearance (an int) 0:Circle 1:Square 2:Triangle 3:+ 4:x
-
getControlPointCaptionAtIndex(self, index: int, iTIndex: int) → str¶ Gets the text associated to a given control point.
Parameters: - index (int) – the T index (an uint32_t)
- iTIndex (int) – the control point index (an uint32_t)
Returns: output (str) – the text
-
getControlPointCount(self, iTIndex: int) → int¶ Gets the number of control points for a given T.
Parameters: iTIndex (int) – the T index (a uint32_t) Returns: output (int) – the number of control points (an uint32_t)
-
getControlPointPositionAtIndex(self, index: int, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → Vector3¶ method getControlPointPositionAtIndex
Parameters: - index (int) –
- iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Vector3) –
-
getControlPoints(self, iTIndex: int) → OrderedCollectionDouble¶ getControlPoints
Parameters: iTIndex (int) – Returns: output (ORSModel.ors.OrderedCollectionDouble) –
-
getCreationOrientedPlane(self) → OrientedPlane¶ Retrieve the oriented plane on which the annotation is created, if it was set.
Returns: output (ORSModel.ors.OrientedPlane) – an Oriented Plane (an OrientedPlane)
-
getCreationOrientedPlaneInView(self, aView: ORSModel.ors.View) → OrientedPlane¶ getCreationOrientedPlaneInView
Parameters: aView (ORSModel.ors.View) – Returns: output (ORSModel.ors.OrientedPlane) –
-
getDistanceFromLineSegment(self, aStartPoint: ORSModel.ors.Vector3, aEndPoint: ORSModel.ors.Vector3, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → float¶ Gets the distance between this annotation and a givenLine Segment.
Parameters: - aStartPoint (ORSModel.ors.Vector3) – the start and end points (Vector3)
- aEndPoint (ORSModel.ors.Vector3) – the t index (a uint32_t)
- iTIndex (int) – a transformation matrix (a Matrix4x4)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (float) – the distance (a double)
-
getDistanceFromPlane(self, aPlane: ORSModel.ors.Plane, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → float¶ Gets the distance between this annotation and a givenPlane.
Parameters: - aPlane (ORSModel.ors.Plane) – the plane (a Plane)
- iTIndex (int) – the T index (an uint32_t)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – an optional transformation matrix (a Matrix4x4 or none)
Returns: output (float) – the distance (a double)
-
getDistanceFromPoint(self, aPoint: ORSModel.ors.Vector3, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → float¶ Gets the distance between this annotation and a given Point.
Parameters: - aPoint (ORSModel.ors.Vector3) – a point (a Vector3)
- iTIndex (int) – the T index (a uint32_t)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – an optional transformation matrix (a Matrix4x4)
Returns: output (float) – the distance (a double)
-
getDrawTextShadow(self) → bool¶ Gets the view text shadows status.
Returns: output (bool) – true if text shadows are visible, false otherwise
-
getHighlightControlPointColor(self) → Color¶ method getHighlightControlPointColor
Returns: output (ORSModel.ors.Color) –
-
getHighlightedControlPointsArray(self, iTIndex: int) → OrderedCollectionUnsignedLong¶ Gets the list of highlighted control points.
Parameters: iTIndex (int) – the T index (a uint32_t) Returns: output (ORSModel.ors.OrderedCollectionUnsignedLong) – a collection of points (an OrderedCollectionUnsignedLong)
-
getHighlightedControlPointsCount(self, iTIndex: int) → int¶ Gets the count of highlighted control points.
Parameters: iTIndex (int) – the T index (a uint32_t) Returns: output (int) – the count (a uint32_t)
-
getIsEditable(self) → bool¶ Sees if the annotation is editable or not.
Note
Non editable annotations appear to be “locked”, i.e. they do not react to user modifications.
Returns: output (bool) – true if the annotation is editable, false otherwise
-
getIsIntersectingBox(self, box: ORSModel.ors.Box, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → bool¶ Indicates if the annotation intersects with a box.
Parameters: - box (ORSModel.ors.Box) – the box (a Box)
- iTIndex (int) – the T index (an uint32_t)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – an optional transformation matrix (a Matrix4x4 or none)
Returns: output (bool) – true if the annotation intersects the box, false otherwise
-
getNormalColor(self) → Color¶ Gets the normal color of the annotation.
Note
Because annotations can switch from normal to selected colors, you can store them within the annotation, and switch from one to the other with setToNormalColor() and setToSelectedColor().
Returns: output (ORSModel.ors.Color) – the color (a Color)
-
getProjectionIn(self, worldTransform: ORSModel.ors.Matrix4x4) → Annotation¶ Projects the annotation in a channel’s space, returning a new annotation.
Parameters: worldTransform (ORSModel.ors.Matrix4x4) – - the channel in which to project (a Channel)
Returns: output (ORSModel.ors.Annotation) – a new annotation (an Annotation)
-
getSelectedColor(self) → Color¶ Gets the selected color of the annotation.
Note
Because annotations can switch from normal to selected colors, you can store them within the annotation, and switch from one to the other with setToNormalColor() and setToSelectedColor().
Returns: output (ORSModel.ors.Color) – the color (a Color)
-
getSelectedControlPointArray(self, iTIndex: int) → OrderedCollectionUnsignedLong¶ method getSelectedControlPointArray
Parameters: iTIndex (int) – Returns: output (ORSModel.ors.OrderedCollectionUnsignedLong) –
-
getSelectedControlPointColor(self) → Color¶ Gets the control point selected color of the annotation.
Returns: output (ORSModel.ors.Color) – the color (a Color)
-
getSelectedControlPointCount(self, iTIndex: int) → int¶ Gets the count of selected control points.
Parameters: iTIndex (int) – the T index (an uint32_t) Returns: output (int) – the count (an uint32_t)
-
getShow3DIn2D(self) → bool¶ Get the Control Point Appearance.
Returns: output (bool) –
-
getShowCaption(self) → bool¶ get the view status of the annotation caption.
Returns: output (bool) – true if caption are displayed, false otherwise
-
getShowControlPoints(self) → bool¶ Sees if control points are visible.
Returns: output (bool) – true if control points are visible, false otherwise
-
getTextColor(self) → Color¶ Gets the text color of the annotation.
Note
The text color is used for the caption.
Returns: output (ORSModel.ors.Color) – the color (a Color)
-
getTextShadowColor(self) → Color¶ Gets the text shadow color of the annotation.
Returns: output (ORSModel.ors.Color) – the color (a Color)
-
getThickness(self) → float¶ Gets the thickness of lines in 2D mode.
Returns: output (float) – the thickness, in screen proportion (a double between 0 and 1)
-
getWellBehaveBoundingBox(timestep, matrix)¶
-
insertControlPoint(self, index: int, pPoint: ORSModel.ors.Vector3, iTIndex: int, aWorldTransformMatrix: ORSModel.ors.Matrix4x4) → None¶ Insert a control point.
Note
Any change to a annotation should be followed by update() to reflect the changes visually.
Parameters: - index (int) – the control point insertion index (an uint32_t)
- pPoint (ORSModel.ors.Vector3) – a point (a Vector3)
- iTIndex (int) – the T index (an uint32_t)
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) – an optional transformation matrix (a Matrix4x4 or none)
-
none()¶ Annotation.__init__() -> Annotation
-
removeAllControlPoints(self, iTIndex: int) → None¶ Removes all control points.
Parameters: iTIndex (int) – the T index (an uint32_t)
-
removeAllControlPointsForAllTimeStep(self) → None¶ Removes all control points.
-
removeControlPoint(self, index: int, iTIndex: int) → None¶ Removes a single control point.
Note
Control point indicies are zero based.
Parameters: - index (int) – the control point index (an uint32_t)
- iTIndex (int) – the T index (an uint32_t)
-
removeControlPointForAllTimeStep(self, index: int) → None¶ Removes a single control point.
Parameters: index (int) – the T index (an uint32_t)
-
removeControlPointFromHighlighted(self, controlPointIndex: int, iTIndex: int) → None¶ Parameters: - controlPointIndex (int) –
- iTIndex (int) –
-
removeControlPointFromSelection(self, controlPointIndex: int, iTIndex: int) → None¶ method removeControlPointFromSelection
Parameters: - controlPointIndex (int) –
- iTIndex (int) –
-
set3DThickness(self, value: float) → None¶ Sets the thickness of lines in 3D mode.
Parameters: value (float) – the thickness, in pixel units (a double between 0 and 1)
-
setAutoCaption(self, aValue: bool) → None¶ method setAutoCaption
Parameters: aValue (bool) –
-
setCaption(self, text: str) → None¶ Sets the caption of the annotation.
Note
Any modification to annotation properties must be followed by an update() to be shown on the view.
Parameters: text (str) – a caption (a string)
-
setCaptionTextFontName(self, sFontName: str) → None¶ Sets the font name of text captions.
Parameters: sFontName (str) – the font name (a string)
-
setCaptionTextFontSize(self, fontSize: float) → None¶ Sets the font size of text captions, in screen one thousandths.
Parameters: fontSize (float) – the font size (a double between 0 and 1)
-
setCaptionTextMinimumFontSize(self, fontSize: int) → None¶ Sets the minimum font size of text captions, in font points.
Parameters: fontSize (int) – the font size
-
setControlPointAppearance(self, nValue: int) → None¶ Sets the control point appearance.
Parameters: nValue (int) – The appearance (an int) 0:Circle 1:Square 2:Triangle 3:+ 4:x
-
setControlPointCaptionAtIndex(self, index: int, iTIndex: int, sCaption: str) → None¶ Sets the caption of a given control point.
Parameters: - index (int) – the control point index (an uint32_t)
- iTIndex (int) – the T index (an uint32_t)
- sCaption (str) – the caption
-
setControlPointPositionAtIndex(self, index: int, iTIndex: int, anIVector: ORSModel.ors.Vector3, aTransformationMatrix: ORSModel.ors.Matrix4x4) → None¶ Sets the position of a given control point.
Parameters: - index (int) – the control point index (an uint32_t)
- iTIndex (int) – the T index (an uint32_t)
- anIVector (ORSModel.ors.Vector3) – the position (a Vector3)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – an optional transformation matrix (a Matrix4x4 or none)
-
setControlPointPositionAtIndexForAllTimeStep(self, index: int, anIVector: ORSModel.ors.Vector3, aTransformationMatrix: ORSModel.ors.Matrix4x4) → None¶ method setControlPointPositionAtIndexForAllTimeStep
Parameters: - index (int) –
- anIVector (ORSModel.ors.Vector3) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
-
setCreationOrientedPlane(self, anOrientedPlane: ORSModel.ors.OrientedPlane) → None¶ Set the oriented plane on which the annotation is created.
Parameters: anOrientedPlane (ORSModel.ors.OrientedPlane) – an Oriented Plane (an OrientedPlane)
-
setCreationOrientedPlaneFromView(self, aView: ORSModel.ors.View) → None¶ Copies the oriented plane from the given view.
Parameters: aView (ORSModel.ors.View) – a view (a View)
-
setDrawTextShadow(self, bFlag: bool) → None¶ Toggles displaying shadows for the text.
Parameters: bFlag (bool) – true to show text shadows, false otherwise
-
setHighlightControlPointColor(self, IColor: ORSModel.ors.Color) → None¶ Set the color of control points.
Parameters: IColor (ORSModel.ors.Color) – the color (a Color)
-
setIsEditable(self, pFlag: bool) → None¶ Sets the annotation to be editable or not.
Note
Non editable annotations appear to be “locked”, i.e. they do not react to user modifications.
Parameters: pFlag (bool) – true to make the annotation editable, false otherwise
-
setNormalColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the normal color of the annotation.
Note
Because annotations can switch from normal to selected colors, you can store them within the annotation, and switch from one to the other with setToNormalColor() and setToSelectedColor().
Parameters: IColor (ORSModel.ors.Color) – the color (a Color)
-
setSelectedColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the selected color of the annotation.
Note
Because annotations can switch from normal to selected colors, you can store them within the annotation, and switch from one to the other with setToNormalColor() and setToSelectedColor().
Parameters: IColor (ORSModel.ors.Color) – the color (a Color)
-
setSelectedControlPointColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the control point selected color of the annotation.
Parameters: IColor (ORSModel.ors.Color) – the color (a Color)
-
setShow3DIn2D(self, nValue: bool) → None¶ Set the Control Point Appearance.
Parameters: nValue (bool) –
-
setShowCaption(self, bShow: bool) → None¶ Toggles the displaying of the annotation caption.
Note
Any modification to annotation properties must be followed by an update() to be shown on the view.
Parameters: bShow (bool) – true to display the caption, false to hide it
-
setShowControlPoints(self, value: bool) → None¶ Toggles the displaying of the annotation control points.
Note
Any modification to annotation properties must be followed by an update() to be shown on the view.
Parameters: value (bool) – true to display the control points, false to hide them
-
setTextColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the text color of the annotation.
Note
The text color is used for the caption.
Parameters: IColor (ORSModel.ors.Color) – the color (a Color)
-
setTextShadowColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the text shadow color of the annotation.
Parameters: IColor (ORSModel.ors.Color) – the color (a Color)
-
setThickness(self, value: float) → None¶ Sets the thickness of lines in 2D mode.
Parameters: value (float) – the thickness, in pixel units (a double between 0 and 1)
-
update(self) → None¶ Updates all visual aspects of the annotation.
-
Array¶
-
class
ORSModel.ors.Array¶ Bases:
ORSModel.ors.SequenceableCollectionbrief_description: None author: Normand Mongeau. version: 1.0 Array abstraction class. Arrays can shrink and grow while preserving their contents. Resizing an array is not internally done, i.e. it’s up to the user of an array
to manage the array size. Accessing an index that’s not in the array will result in an error.-
copyFromMemory(self, pSource: int, iByteCount: int, iInsertionIndex: int) → None¶ Copies a memory buffer in the array.
Note
The array will grow to accommodate the copied data, if required.
Parameters: - pSource (bytes) – the source (a unsigned char*)
- iByteCount (int) – the size of the source, in bytes (a uint64_t)
- iInsertionIndex (int) – the insertion index into the array (a uint64_t, zero based)
-
copyFromNumpyArray()¶
-
copyIntoMemory(self, pOutput: int, iStartIndex: int, iNbElementsToCopy: int) → None¶ Copies the array to a memory buffer.
Note
The memory buffer needs to be big enough to accommodate the input.
Parameters: - pOutput (bytes) – the target memory buffer (a unsigned char*)
- iStartIndex (int) – the starting index of the source array (a uint64_t, zero based)
- iNbElementsToCopy (int) – the number of array elements to copy (a uint64_t)
-
classmethod
createArrayFromNumpyArray(np_array, packet_size=64) → ORSModel.ors.Array¶
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getNDArray()¶
-
getNumpyArrayCopy()¶
-
getOffsetBitAnd(self) → int¶ Returns: output (int) –
-
getOffsetBitShift(self) → int¶ Returns: output (int) –
-
getPacketCount(self) → int¶ Gets the number of packets currently in the array.
Note
Arrays are composed of packets, this method return the number of packets.
Returns: output (int) – the packet count (an uint32_t)
-
getPacketSize(self) → int¶ Gets the packet size used by the array.
Note
Arrays are composed of packets, this method return the packet size used. The packet size represents the number of items in the packet, not the byte size.
Returns: output (int) – the packet size (an uint32_t)
-
none()¶ Array.__init__() -> Array
-
setInitialSize(self, iPacketSize: int, initialSize: int) → None¶ Sets the initial size of the array.
Note
This should be the first method invoked after instantiating the array. If the array has been used (items added/deleted) then this method can be costly if the array has many elements, as changing the internal storage implies that the data can co-exist momentarily.
Note
Arrays are composed of packets, this method controls the packet size used. Default values are 64 and 64.
Parameters: - iPacketSize (int) – the packet size (a uint32_t)
- initialSize (int) – the initial array size (a uint64_t)
-
ArrayChar¶
-
class
ORSModel.ors.ArrayChar¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type char (1 byte per value).
-
at(self, index: int) → int¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (int) – the value (a signed char)
-
atPut(self, index: int, pValue: int) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (int) – the value to put (a signed char)
-
copyInto(self, anArray: ORSModel.ors.ArrayChar, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ORSModel.ors.ArrayChar) – the destination array (an ORSArrayCharPtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: int) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (int) – the value to search for (a signed char) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: int) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (int) – the value to search for (a signed char) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → int¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the largest value found (a signed short)
-
getMin(self, startIndex: int, endIndex: int) → int¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the smallest value found (a signed short)
-
getMinMax(self, startIndex: int, endIndex: int, min: int, max: int) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (bytes) – the smallest value found (a signed char*)
- max (bytes) – the largest value found (a signed char*)
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (int) – the value to insert (a signed char)
-
none()¶ ArrayChar.__init__() -> ArrayChar
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: int) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (int) – the value to set (a signed char)
-
ArrayDouble¶
-
class
ORSModel.ors.ArrayDouble¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type double (8 bytes per value).
-
at(self, index: int) → float¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (float) – the value (a double)
-
atPut(self, index: int, pValue: float) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (float) – the value to put (a double)
-
copyInto(self, anArray: ORSModel.ors.ArrayDouble, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ORSModel.ors.ArrayDouble) – the destination array (an ORSArrayDoublePtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: float) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (float) – the value to search for (a double) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: float) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (float) – the value to search for (a double) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → float¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (float) – the largest value found (a double)
-
getMin(self, startIndex: int, endIndex: int) → float¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (float) – the smallest value found (a double)
-
getMinMax(self, startIndex: int, endIndex: int, min: float, max: float) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (float) – the smallest value found (a double*)
- max (float) – the largest value found (a double*)
-
getOccurrencesOf(self, pValue: float) → int¶ Parameters: pValue (float) – Returns: output (int) –
-
insertAt(self, index: int, pValue: float) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (float) – the value to insert (a double)
-
none()¶ ArrayDouble.__init__() -> ArrayDouble
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: float) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (float) – the value to set (a double)
-
ArrayFloat¶
-
class
ORSModel.ors.ArrayFloat¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type float (4 bytes per value).
-
at(self, index: int) → float¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (float) – the value (a float)
-
atPut(self, index: int, pValue: float) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (float) – the value to put (a float)
-
copyInto(self, anArray: ORSModel.ors.ArrayFloat, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ORSModel.ors.ArrayFloat) – the destination array (an ORSArrayFloatPtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: float) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (float) – the value to search for (a float) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: float) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (float) – the value to search for (a float) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → float¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (float) – the largest value found (a float)
-
getMin(self, startIndex: int, endIndex: int) → float¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (float) – the smallest value found (a float)
-
getMinMax(self, startIndex: int, endIndex: int, min: float, max: float) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (float) – the smallest value found (a float*)
- max (float) – the largest value found (a float*)
-
getOccurrencesOf(self, pValue: float) → int¶ Parameters: pValue (float) – Returns: output (int) –
-
insertAt(self, index: int, pValue: float) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (float) – the value to insert (a float)
-
none()¶ ArrayFloat.__init__() -> ArrayFloat
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: float) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (float) – the value to set (a float)
-
ArrayLONGLONG¶
-
class
ORSModel.ors.ArrayLONGLONG¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type int64_t (8 bytes per value).
-
at(self, index: int) → int¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (int) – the value (a int64_t)
-
atPut(self, index: int, pValue: int) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (int) – the value to put (a int64_t)
-
copyInto(self, anArray: ORSModel.ors.ArrayLONGLONG, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ArrayLONGLONG) – the destination array (an ORSArrayLONGLONGPtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: int) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (int) – the value to search for (a int64_t) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: int) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (int) – the value to search for (a int64_t) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → int¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the largest value found (a int64_t)
-
getMin(self, startIndex: int, endIndex: int) → int¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the smallest value found (a int64_t)
-
getMinMax(self, startIndex: int, endIndex: int, min: int, max: int) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (int) – the smallest value found (a int64_t*)
- max (int) – the largest value found (a int64_t*)
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (int) – the value to insert (a int64_t)
-
none()¶ ArrayLONGLONG.__init__() -> ArrayLONGLONG
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: int) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (int) – the value to set (a int64_t)
-
ArrayLong¶
-
class
ORSModel.ors.ArrayLong¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type int32_t (4 bytes per value).
-
at(self, index: int) → int¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (int) – the value (a int32_t)
-
atPut(self, index: int, pValue: int) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (int) – the value to put (a int32_t*)
-
copyInto(self, anArray: ORSModel.ors.ArrayLong, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ORSModel.ors.ArrayLong) – the destination array (an ORSArrayLongPtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: int) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (int) – the value to search for (a int32_t*) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: int) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (int) – the value to search for (a int32_t*) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → int¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the largest value found (a int32_t)
-
getMin(self, startIndex: int, endIndex: int) → int¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the smallest value found (a int32_t)
-
getMinMax(self, startIndex: int, endIndex: int, min: int, max: int) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (int) – the smallest value found (a int32_t*)
- max (int) – the largest value found (a int32_t*)
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (int) – the value to insert (a int32_t*)
-
none()¶ ArrayLong.__init__() -> ArrayLong
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: int) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (int) – the value to set (a int32_t*)
-
ArrayShort¶
-
class
ORSModel.ors.ArrayShort¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type short (2 bytes per value).
-
at(self, index: int) → int¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (int) – the value (a short)
-
atPut(self, index: int, pValue: int) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (int) – the value to put (a short)
-
copyInto(self, anArray: ORSModel.ors.ArrayShort, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ORSModel.ors.ArrayShort) – the destination array (an ORSArrayShortPtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: int) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (int) – the value to search for (a short) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: int) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (int) – the value to search for (a short) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → int¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the largest value found (a signed short)
-
getMin(self, startIndex: int, endIndex: int) → int¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the smallest value found (a signed short)
-
getMinMax(self, startIndex: int, endIndex: int, min: int, max: int) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (int) – the smallest value found (a short*)
- max (int) – the largest value found (a short*)
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (int) – the value to insert (a short)
-
none()¶ ArrayShort.__init__() -> ArrayShort
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: int) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (int) – the value to set (a short)
-
ArrayUnsignedChar¶
-
class
ORSModel.ors.ArrayUnsignedChar¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type unsigned char (1 byte per value).
-
at(self, index: int) → int¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (int) – the value (an char)
-
atPut(self, index: int, pValue: int) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (int) – the value to put (an unsigned char)
-
copyInto(self, anArray: ORSModel.ors.ArrayUnsignedChar, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ORSModel.ors.ArrayUnsignedChar) – the destination array (an ORSArrayUnsignedCharPtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: int) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (int) – the value to search for (an unsigned char) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: int) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (int) – the value to search for (an unsigned char) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → int¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the largest value found (an short)
-
getMin(self, startIndex: int, endIndex: int) → int¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the smallest value found (an short)
-
getMinMax(self, startIndex: int, endIndex: int, min: int, max: int) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (bytes) – the smallest value found (an unsigned char*)
- max (bytes) – the largest value found (an unsigned char*)
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (int) – the value to insert (an unsigned char)
-
none()¶ ArrayUnsignedChar.__init__() -> ArrayUnsignedChar
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: int) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (int) – the value to set (an unsigned char)
-
ArrayUnsignedLONGLONG¶
-
class
ORSModel.ors.ArrayUnsignedLONGLONG¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type uint64_t (8 bytes per value).
-
at(self, index: int) → int¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (int) – the value (a uint64_t)
-
atPut(self, index: int, pValue: int) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (int) – the value to put (a uint64_t)
-
copyInto(self, anArray: ORSModel.ors.ArrayUnsignedLONGLONG, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ArrayUnsignedLONGLONG) – the destination array (an ORSArrayUnsignedLONGLONGPtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: int) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (int) – the value to search for (a uint64_t) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: int) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (int) – the value to search for (a uint64_t) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → int¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the largest value found (an uint64_t)
-
getMin(self, startIndex: int, endIndex: int) → int¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the smallest value found (an uint64_t)
-
getMinMax(self, startIndex: int, endIndex: int, min: int, max: int) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (int) – the smallest value found (an uint64_t*)
- max (int) – the largest value found (an uint64_t*)
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (int) – the value to insert (a uint64_t)
-
none()¶ ArrayUnsignedLONGLONG.__init__() -> ArrayUnsignedLONGLONG
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: int) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (int) – the value to set (an uint64_t)
-
ArrayUnsignedLong¶
-
class
ORSModel.ors.ArrayUnsignedLong¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type uint32_t (4 bytes per value).
-
at(self, index: int) → int¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (int) – the value (an uint32_t)
-
atPut(self, index: int, pValue: int) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (int) – the value to put (an uint32_t)
-
copyInto(self, anArray: ORSModel.ors.ArrayUnsignedLong, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ORSModel.ors.ArrayUnsignedLong) – the destination array (an ORSArrayUnsignedLongPtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: int) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (int) – the value to search for (an uint32_t) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: int) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (int) – the value to search for (an uint32_t) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → int¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the largest value found (an uint32_t)
-
getMin(self, startIndex: int, endIndex: int) → int¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the smallest value found (an uint32_t)
-
getMinMax(self, startIndex: int, endIndex: int, min: int, max: int) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (int) – the smallest value found (an uint32_t*)
- max (int) – the largest value found (an uint32_t*)
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (int) – the value to insert (an uint32_t)
-
none()¶ ArrayUnsignedLong.__init__() -> ArrayUnsignedLong
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: int) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (int) – the value to set (an uint32_t)
-
ArrayUnsignedShort¶
-
class
ORSModel.ors.ArrayUnsignedShort¶ Bases:
ORSModel.ors.Arraybrief_description: None author: Normand Mongeau. version: 1.0 Array for numeric values of type unsigned short (2 bytes per value).
-
at(self, index: int) → int¶ Retrieves a single value from the array.
Parameters: index (int) – the index of the item to retrieve (an uint64_t, zero based) Returns: output (int) – the value (an short)
-
atPut(self, index: int, pValue: int) → None¶ Puts a single value into the array.
Note
Any previous value at the given position is lost.
Parameters: - index (int) – the index of the item to modify (an uint64_t, zero based)
- pValue (int) – the value to put (an unsigned short)
-
copyInto(self, anArray: ORSModel.ors.ArrayUnsignedShort, iInsertionIndex: int, iStartIndex: int, iEndIndex: int) → None¶ Copies portions of the source array in another array.
Note
The destination array will grow to accommodate the copied data, if required.
Parameters: - anArray (ORSModel.ors.ArrayUnsignedShort) – the destination array (an ORSArrayUnsignedShortPtr)
- iInsertionIndex (int) – the insertion index into the destination array (a uint64_t, zero based)
- iStartIndex (int) – the start index of the source (a uint64_t, zero based)
- iEndIndex (int) – the end index of the source (a uint64_t, zero based)
-
findFirst(self, pValue: int) → int¶ Searches the array for a given value, starting at index 0.
Parameters: pValue (int) – the value to search for (an unsigned short) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
findLast(self, pValue: int) → int¶ Searches the array for a given value, starting at indexgetSize() - 1 (the end of the array).
Parameters: pValue (int) – the value to search for (an unsigned short) Returns: output (int) – the index of the value (an uint64_t, zero based), or ULLONG_MAX if not found
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMax(self, startIndex: int, endIndex: int) → int¶ Returns the max value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the largest value found (an short)
-
getMin(self, startIndex: int, endIndex: int) → int¶ Returns the min value within the array.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: output (int) – the smallest value found (an short)
-
getMinMax(self, startIndex: int, endIndex: int, min: int, max: int) → None¶ Returns the min and max values within the array.
Note
Return values are written to the supplied arguments.
Parameters: - startIndex (int) – the start index where to search (a uint64_t, zero based, inclusive)
- endIndex (int) – the end index where to search (a uint64_t, zero based, inclusive)
Returns: - min (int) – the smallest value found (an unsigned short*)
- max (int) – the largest value found (an unsigned short*)
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Inserts a single item into the array.
Note
All items after the insertion index are shifted down. The last element of the array is thus lost.
Parameters: - index (int) – the index of the item to insert (an uint64_t, zero based)
- pValue (int) – the value to insert (an unsigned short)
-
none()¶ ArrayUnsignedShort.__init__() -> ArrayUnsignedShort
-
privateGetDataPacketAtIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
setAll(self, iValue: int) → None¶ Sets all elements of the array to the same value.
Parameters: iValue (int) – the value to set (an unsigned short)
-
Box¶
-
class
ORSModel.ors.Box¶ Bases:
ORSModel.ors.Shape3Dbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2010
-
clip(self, pBox: ORSModel.ors.Box) → None¶ Clip the box with the given box if both box are aligned, do nothing otherwise.
Parameters: pBox (ORSModel.ors.Box) – a box (a Box)
-
createFromPythonRepresentation(aPythonRepresentation: str) → Box¶ Create aBox object from a Python string representation a static method.
Parameters: aPythonRepresentation (str) – a Python evaluable string representation (a string) Returns: output (ORSModel.ors.Box) – a box (a Box)
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ Create aBox object from a Python string representation.
Parameters: aPythonRepresentation (str) – a Python evaluable string representation (a string) Returns: output (bool) – TRUE if parsing worked, FALSE otherwise (a bool)
-
getBoundedPlaneOfSlice(self, sliceIndex: int) → Rectangle¶ Gets the bounded plane for a given direction2 index.
Parameters: sliceIndex (int) – the index in the direction2 of the box (an uint32_t) Returns: output (ORSModel.ors.Rectangle) – the bounded plane (a Rectangle)
-
getBoxInBoxReferential(self, inRefBox: ORSModel.ors.Box) → Box¶ Gets a copy of the receiver in the argument referential.
Parameters: inRefBox (ORSModel.ors.Box) – a box, the destination referential (an Box) Returns: output (ORSModel.ors.Box) – a box, a copy of the receiver in the argument referential (an Box)
-
getBoxToWorld(self, intVect: ORSModel.ors.Vector3) → Vector3¶ Transforms the given point (which is expressed in the box referential) in the world referential.
Note
Here the spacing is not considered.
Parameters: intVect (ORSModel.ors.Vector3) – a point (an Vector3) Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
getCenter(self) → Vector3¶ Gets the geometrical middle of the box.
Returns: output (ORSModel.ors.Vector3) – a box center position (an Vector3)
-
getCenterHalfVoxel(self) → Vector3¶ Gets the middle of the voxel in the middle of the box.
Returns: output (ORSModel.ors.Vector3) – a box center position (an Vector3)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getContainsBox(self, aBox: ORSModel.ors.Box) → bool¶ Gets if the given box is totally contained in the receiver.
Parameters: aBox (ORSModel.ors.Box) – a box (a Box) Returns: output (bool) – TRUE if the given box is totally contained in the receiver, FALSE otherwise
-
getDirection(self, index: int) → Vector3¶ Gets a box direction.
Note
The direction vector is normalized.
Parameters: index (int) – the side index (a uint16_t) Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirection0(self) → Vector3¶ Gets the box direction0.
Note
The direction0 vector is normalized.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirection0Size(self) → float¶ Gets the box direction0 side length.
Note
This is the size in meters of the box side 0.
Returns: output (float) – the side 0 length (a double)
-
getDirection0SizeInVoxel(self) → int¶ Gets the direction0 size in voxels.
Returns: output (int) – the size in voxels (an uint32_t)
-
getDirection0Spacing(self) → float¶ Gets the box direction0 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Returns: output (float) – the side 0 spacing (a double)
-
getDirection1(self) → Vector3¶ Gets the box direction1.
Note
The direction1 vector is normalized.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirection1Size(self) → float¶ Gets the box direction1 side length.
Note
This is the size in meters of the box side 1.
Returns: output (float) – the side 1 length (a double)
-
getDirection1SizeInVoxel(self) → int¶ Gets the direction1 size in voxels.
Returns: output (int) – the size in voxels (an uint32_t)
-
getDirection1Spacing(self) → float¶ Gets the box direction1 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Returns: output (float) – the side 1 spacing (a double)
-
getDirection2(self) → Vector3¶ Gets the box direction2.
Note
The direction2 vector is normalized.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirection2Size(self) → float¶ Gets the box direction2 side length.
Note
This is the size in meters of the box side 2.
Returns: output (float) – the side 2 length (a double)
-
getDirection2SizeInVoxel(self) → int¶ Gets the direction2 size in voxels.
Returns: output (int) – the size in voxels (an uint32_t)
-
getDirection2Spacing(self) → float¶ Gets the box direction2 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Returns: output (float) – the side 2 spacing (a double)
-
getDirectionMax(self) → Vector3¶ Get the direction of the maximal size.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirectionMid(self) → Vector3¶ Get the direction of the middle size.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirectionMin(self) → Vector3¶ Get the direction of the minimal size.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirectionSize(self, index: int) → float¶ Gets a box direction side length.
Note
This is the size in meters of the box side.
Parameters: index (int) – the side index (a uint16_t) Returns: output (float) – the side length (a double)
-
getDirectionSizeMax(self) → float¶ Get the maximal direction size of the box.
Returns: output (float) – the side length (a double)
-
getDirectionSizeMid(self) → float¶ Get the middle direction size of the box.
Returns: output (float) – the side length (a double)
-
getDirectionSizeMin(self) → float¶ Get the minimal direction size of the box.
Returns: output (float) – the side length (a double)
-
getDirectionSizeVector(self) → Vector3¶ Gets the direction size as a vector.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirectionSpacing(self, index: int) → float¶ Gets the box direction spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Parameters: index (int) – the side index (a uint16_t) Returns: output (float) – the side spacing (a double)
-
getDirectionSpacingVector(self) → Vector3¶ Gets the direction spacing as a vector.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getEnclosingBox(self, dir0: ORSModel.ors.Vector3, dir1: ORSModel.ors.Vector3) → Box¶ Makes the box containing the receiver, oriented with the provided directions.
Parameters: - dir0 (ORSModel.ors.Vector3) – direction0 of the new box (a Vector3)
- dir1 (ORSModel.ors.Vector3) – direction1 of the new box (a Vector3)
Returns: output (ORSModel.ors.Box) – the box containing the receiver (a Box)
-
getFace(self, faceIndex: int) → Rectangle¶ Gets the bounded plane of a face.
Parameters: faceIndex (int) – the side index (a uint16_t) Returns: output (ORSModel.ors.Rectangle) – a bounded plane (a Rectangle)
-
getFirstIntersectingFace(self, aLine: ORSModel.ors.Line) → int¶ Gets the face index of intersection closest to the origin of a line.
Parameters: aLine (ORSModel.ors.Line) – a line (a Line) Returns: output (int) – the side index (a short). This value is -1 if there is no intersection between the receiver and the given line.
-
getHasSameOrientation(self, pBox: ORSModel.ors.Box) → bool¶ Gets if the receiver has the same orientation as the given box.
Parameters: pBox (ORSModel.ors.Box) – a box to compare (a Box) Returns: output (bool) – TRUE if the receiver has the same orientation, FALSE otherwise (a bool)
-
getHasSameOrthonormalBase(self, pBox: ORSModel.ors.Box) → bool¶ Gets if the receiver has the same orthonormal base as the given box.
Parameters: pBox (ORSModel.ors.Box) – a box to compare (a Box) Returns: output (bool) – TRUE if the receiver has the same orthonormal base, FALSE otherwise (a bool)
-
getIntersectionWithLine(self, aLine: ORSModel.ors.Line) → LineSegment¶ Gets the intersection of the receiver with the given line.
Parameters: aLine (ORSModel.ors.Line) – a line (a Line) Returns: output (ORSModel.ors.LineSegment) – the line segment at the intersection of the box with the given line (a LineSegment)
-
getIntersectionWithLineSegment(self, inputLineSegment: ORSModel.ors.LineSegment) → LineSegment¶ Gets the intersection of the receiver with the given line segment.
Parameters: inputLineSegment (ORSModel.ors.LineSegment) – a line segment (a LineSegment) Returns: output (ORSModel.ors.LineSegment) – the line segment at the intersection of the box with the given line segment (a LineSegment)
-
getIsEqualTo(self, aBox: ORSModel.ors.Box) → bool¶ Checks for equality to another box.
Parameters: aBox (ORSModel.ors.Box) – a box (an Box) Returns: output (bool) – TRUE if the boxes are equal, FALSE otherwise
-
getIsIntersectingBox(self, aBox: ORSModel.ors.Box) → bool¶ Gets if the receiver intersects the given box.
Parameters: aBox (ORSModel.ors.Box) – a box to intersect with the receiver (a Box) Returns: output (bool) – TRUE if the receiver intersects the box, FALSE otherwise (a bool)
-
getIsIntersectingLine(self, aLine: ORSModel.ors.Line) → bool¶ Gets if the receiver intersects the given line.
Parameters: aLine (ORSModel.ors.Line) – a line (a Line) Returns: output (bool) – TRUE if the box intersects the line, FALSE otherwise (a bool)
-
getIsIntersectingLineSegment(self, inputLineSegment: ORSModel.ors.LineSegment) → bool¶ Gets if the receiver intersects the given line segment.
Parameters: inputLineSegment (ORSModel.ors.LineSegment) – a line segment (a LineSegment) Returns: output (bool) – TRUE if the box intersects the line segment, FALSE otherwise (a bool)
-
getIsIntersectingPlane(self, aPlane: ORSModel.ors.Plane) → bool¶ Gets if the receiver intersects the given plane.
Parameters: aPlane (ORSModel.ors.Plane) – a plane (a Plane) Returns: output (bool) – TRUE if the box intersects the plane, FALSE otherwise (a bool)
-
getIsIntersectingRectangle(self, aBplane: ORSModel.ors.Rectangle) → bool¶ Gets if the receiver intersects the given bounded plane.
Parameters: aBplane (ORSModel.ors.Rectangle) – a bounded plane (a Rectangle) Returns: output (bool) – TRUE if the box intersects the bounded plane, FALSE otherwise (a bool)
-
getIsPointInside(self, aPosition: ORSModel.ors.Vector3) → bool¶ Verifies if a point is inside the box.
Parameters: aPosition (ORSModel.ors.Vector3) – a point (an Vector3) Returns: output (bool) – TRUE if the point is inside the box, FALSE otherwise
-
getMostSimilarDirectionIndex(self, pVect: ORSModel.ors.Vector3) → int¶ Gets the index of the direction vector closest to the vector given.
Parameters: pVect (ORSModel.ors.Vector3) – a direction (a Vector3) Returns: output (int) – the direction vector index (a uint16_t)
-
getNearestPointOnBoxSurfaceFromLineOnPlane(self, aPlane: ORSModel.ors.Plane, aLine: ORSModel.ors.Line, insideDeep: float) → Vector3¶ Gets the closest point located on the box surface to the given line on the given plane.
Parameters: - aPlane (ORSModel.ors.Plane) – a plane (a Plane)
- aLine (ORSModel.ors.Line) – a line (a Line)
- insideDeep (float) – a displacement distance to add in the direction from the point found at the surface of the box to the closest point on the line (a double)
Returns: output (ORSModel.ors.Vector3) – the point on the box (an Vector3)
-
getNearestPointOnBoxSurfaceFromPointOnPlane(self, aPlane: ORSModel.ors.Plane, aPoint: ORSModel.ors.Vector3, insideDeep: float) → Vector3¶ Gets the closest point located on the box surface to the given point on the given plane.
Parameters: - aPlane (ORSModel.ors.Plane) – a plane (a Plane)
- aPoint (ORSModel.ors.Vector3) – a point (a Vector3)
- insideDeep (float) – a displacement distance to add in the direction from the point found at the surface of the box to the provided point (a double)
Returns: output (ORSModel.ors.Vector3) – the point on the box (an Vector3)
-
getOrigin(self) → Vector3¶ Gets the box origin position.
Note
The origin is in world coordinates.
Returns: output (ORSModel.ors.Vector3) – the origin (an Vector3)
-
getOriginOpposite(self) → Vector3¶ Gets the position of the corner opposite to the origin.
Note
The origin opposite is in world coordinates.
Returns: output (ORSModel.ors.Vector3) – the origin opposite (an Vector3)
-
getOutwardFacePlane(self, faceIndex: int) → Plane¶ Returns the given face index plane with outward normal.
Parameters: faceIndex (int) – the side index (a uint16_t) Returns: output (ORSModel.ors.Plane) – a plane (a Plane)
-
getPlaneInBoxReferential(self, pPlane: ORSModel.ors.Plane) → Plane¶ Transforms the plane provided in the receiver referential.
Parameters: pPlane (ORSModel.ors.Plane) – a plane (a Plane) Returns: output (ORSModel.ors.Plane) – a plane in the box referential (a Plane)
-
getPlaneTranslatedSoThatItIntersect(self, aPlane: ORSModel.ors.Plane) → Plane¶ Gets a translated plane intersecting the box at its closest location.
Parameters: aPlane (ORSModel.ors.Plane) – a plane (a Plane) Returns: output (ORSModel.ors.Plane) – the translated plane intersecting the box (a Plane)
-
getPythonRepresentation(self) → str¶ Gets a Python evaluable string representation.
Returns: output (str) –
-
getRectangleOfIntersection(self, cutPlane: ORSModel.ors.Plane, upVector: ORSModel.ors.Vector3) → Rectangle¶ Computes the bounded plane (with direction 1 vector equal to the up vector provided) of the intersection of the receiver with a plane.
Note
The bounded plane will have an area of zero if the plane does not intersect the box.
Parameters: - cutPlane (ORSModel.ors.Plane) – a plane (an Plane)
- upVector (ORSModel.ors.Vector3) – an up vector (an Vector3)
Returns: output (ORSModel.ors.Rectangle) – a bounded plane (a Rectangle)
-
getRotationMatrix(self) → Matrix4x4¶ Get the rotation matrix define by the box.
Returns: output (ORSModel.ors.Matrix4x4) – the rotation matrix (a Matrix4x4)
-
getSpacingInDirection(self, aDirection: ORSModel.ors.Vector3) → float¶ Gets the spacing in the specified direction.
Parameters: aDirection (ORSModel.ors.Vector3) – the direction vector (an Vector3) Returns: output (float) – the spacing (a double)
-
getSubBoxForIndex(self, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int) → Box¶ Get a subbox for the given index.
Parameters: - minX (int) – the smallest index in direction0 (an int32_t)
- minY (int) – the smallest index in direction1 (an int32_t)
- minZ (int) – the smallest index in direction2 (an int32_t)
- maxX (int) – the biggest index in direction0 (an int32_t)
- maxY (int) – the biggest index in direction1 (an int32_t)
- maxZ (int) – the biggest index in direction2 (an int32_t)
Returns: output (ORSModel.ors.Box) – the subbox (a Box)
-
getSummit(self, maxDirection0: bool, maxDirection1: bool, maxDirection2: bool) → Vector3¶ Gets the position of one of the summits of the box.
Parameters: - maxDirection0 (bool) – TRUE to get maxDirection0, FALSE to get minDirection0
- maxDirection1 (bool) – TRUE to get maxDirection1, FALSE to get minDirection1
- maxDirection2 (bool) – TRUE to get maxDirection2, FALSE to get minDirection2
Returns: output (ORSModel.ors.Vector3) – a summit position (a Vector3)
-
getSummitmmm(self) → Vector3¶ Gets the (minDirection0, minDirection1, minDirection2) summit position.
Returns: output (ORSModel.ors.Vector3) – a summit position (a Vector3)
-
getSummitmmp(self) → Vector3¶ Gets the (minDirection0, minDirection1, maxDirection2) summit position.
Returns: output (ORSModel.ors.Vector3) – a summit position (a Vector3)
-
getSummitmpm(self) → Vector3¶ Gets the (minDirection0, maxDirection1, minDirection2) summit position.
Returns: output (ORSModel.ors.Vector3) – a summit position (a Vector3)
-
getSummitmpp(self) → Vector3¶ Gets the (minDirection0, maxDirection1, maxDirection2) summit position.
Returns: output (ORSModel.ors.Vector3) – a summit position (a Vector3)
-
getSummitpmm(self) → Vector3¶ Gets the (maxDirection0, minDirection1, minDirection2) summit position.
Returns: output (ORSModel.ors.Vector3) – a summit position (a Vector3)
-
getSummitpmp(self) → Vector3¶ Gets the (maxDirection0, minDirection1, maxDirection2) summit position.
Returns: output (ORSModel.ors.Vector3) – a summit position (a Vector3)
-
getSummitppm(self) → Vector3¶ Gets the (maxDirection0, maxDirection1, minDirection2) summit position.
Returns: output (ORSModel.ors.Vector3) – a summit position (a Vector3)
-
getSummitppp(self) → Vector3¶ Gets the (maxDirection0, maxDirection1, maxDirection2) summit position.
Returns: output (ORSModel.ors.Vector3) – a summit position (a Vector3)
-
getSurface(self) → float¶ Gets the surface of the receiver.
Returns: output (float) – a surface (a double)
-
getTransformationToGoTo(self, pIBox: ORSModel.ors.Box) → Matrix4x4¶ Gets the 4x4 matrix transforming the receiver into the argument.
Note
The transformation can include: translation, rotation and scaling.
Parameters: pIBox (ORSModel.ors.Box) – a box (an Box) Returns: output (ORSModel.ors.Matrix4x4) – a transformation matrix (an Matrix4x4)
-
getVolume(self) → float¶ Gets the volume of the receiver.
Returns: output (float) – a volume (a double)
-
getVoxelToWorldCoordinates(self, anIndex: ORSModel.ors.Vector3) → Vector3¶ Gets the position of a given voxel.
Note
Only useful if the spacing of the direction vectors have been defined.
Parameters: anIndex (ORSModel.ors.Vector3) – a voxel position (an Vector3) Returns: output (ORSModel.ors.Vector3) – the position in world coordinates (an Vector3)
-
getWorldToBox(self, inVect: ORSModel.ors.Vector3) → Vector3¶ Transforms the given point in the box referential.
Note
Here the spacing is not considered.
Parameters: inVect (ORSModel.ors.Vector3) – a point (an Vector3) Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
getWorldToVoxelCoordinates(self, pPointInWorld: ORSModel.ors.Vector3) → Vector3¶ Gets the position of a given world coordinate.
Note
Only useful if the spacing of the direction vectors have been defined.
Parameters: pPointInWorld (ORSModel.ors.Vector3) – a world coordinate position vector (an Vector3) Returns: output (ORSModel.ors.Vector3) – the position in local coordinates (an Vector3)
-
getWorldTranformation(self) → Matrix4x4¶ Gets the transformation from the unit box to the receiver.
Returns: output (ORSModel.ors.Matrix4x4) –
-
grow(self, growSize: ORSModel.ors.Vector3) → None¶ Grows or shrinks the receiver, arount its center.
Parameters: growSize (ORSModel.ors.Vector3) – a vector with the amount of growth of each direction vector length (an Vector3)
-
growToContain(self, pBox: ORSModel.ors.Box) → None¶ Grows to include a given box.
Note
The receiver will grow to contain the provided box, but it will never shrink.
Parameters: pBox (ORSModel.ors.Box) – a box (a Box)
-
growToIncludePoint(self, aPoint: ORSModel.ors.Vector3) → None¶ Grows the receiver as to include the provided point.
Parameters: aPoint (ORSModel.ors.Vector3) – a point to be included in the box (an Vector3)
-
makeAbleToContain(self, pBox: ORSModel.ors.Box) → None¶ Makes the box able to contain a given box.
Note
The receiver will grow or shrink to fit on the provided box.
Parameters: pBox (ORSModel.ors.Box) – a box (an Box)
-
moveFaceSoThatPlaneIncludesPoint(self, faceIndex: int, pVect: ORSModel.ors.Vector3) → None¶ Moves the face at the given index so that the given point lie on the face plane.
Parameters: - faceIndex (int) – the side index (a uint16_t)
- pVect (ORSModel.ors.Vector3) – a point to be contained by the face plane (an Vector3)
-
none()¶ Box.__init__() -> Box
-
orthonormalizeDirections(self) → None¶ Orthonormalizes the directions of the box.
-
setDirection(self, index: int, pVect: ORSModel.ors.Vector3) → None¶ Sets a box direction.
Note
The direction vector will be normalized.
Parameters: - index (int) – the side index (a uint16_t)
- pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setDirection0(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the box direction0.
Note
The direction0 vector will be normalized.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setDirection0Size(self, aSize: float) → None¶ Sets the box direction0 vector length.
Note
This is the size in meters of the box side 0.
Parameters: aSize (float) – the side 0 length (a double)
-
setDirection0Spacing(self, aSpacing: float) → None¶ Sets the box direction0 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Parameters: aSpacing (float) – the side 0 spacing (a double)
-
setDirection1(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the box direction1.
Note
The direction1 vector will be normalized.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setDirection1Size(self, aSize: float) → None¶ Sets the box direction1 vector length.
Note
This is the size in meters of the box side 1.
Parameters: aSize (float) – the side 1 length (a double)
-
setDirection1Spacing(self, aSpacing: float) → None¶ Sets the box direction1 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Parameters: aSpacing (float) – the side 1 spacing (a double)
-
setDirection2(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the box direction2.
Note
The direction2 vector will be normalized.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setDirection2Size(self, aSize: float) → None¶ Sets the box direction2 vector length.
Note
This is the size in meters of the box side 2.
Parameters: aSize (float) – the side 2 length (a double)
-
setDirection2Spacing(self, aSpacing: float) → None¶ Sets the box direction2 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Parameters: aSpacing (float) – the side 2 spacing (a double)
-
setDirectionSize(self, index: int, aSize: float) → None¶ Sets a box direction vector length.
Note
This is the size in meters of the box side.
Parameters: - index (int) – the side index (a uint16_t)
- aSize (float) – the side length (a double)
-
setDirectionSizeVector(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the direction size as a vector.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setDirectionSpacing(self, index: int, aSpacing: float) → None¶ Sets a box direction spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Parameters: - index (int) – the side index (a uint16_t)
- aSpacing (float) – the side spacing (a double)
-
setDirectionSpacingVector(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the direction spacing as a vector.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setOrigin(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the box origin position.
Note
The origin should be in world coordinates.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
shape¶
-
Camera¶
-
class
ORSModel.ors.Camera¶ Bases:
ORSModel.ors.Unmanagedbrief_description: The camera object, i.e. the view point from which we look at objects. author: Nicolas Piché. All other members of ORS participated. version: 1.0 date: May 2010
-
copy(self) → Camera¶ Gets a copy.
Returns: output (ORSModel.ors.Camera) –
-
copyFrom(self, aCamera: ORSModel.ors.Camera) → None¶ Copy the parameters of a given camera.
Parameters: aCamera (ORSModel.ors.Camera) –
-
createFromPythonRepresentation(aPythonRepresentation: str) → Camera¶ Create aCamera from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Camera) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ set aCamera from a python representation
Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getAngleOfView(self) → float¶ Gets angle of view.
Returns: output (float) –
-
getCameraDirection(self) → Vector3¶ Gets the look at direction.
Returns: output (ORSModel.ors.Vector3) –
-
getCameraLeft(self) → Vector3¶ Gets the left direction.
Returns: output (ORSModel.ors.Vector3) –
-
getCameraPivot(self) → Vector3¶ Gets the pivot position.
Returns: output (ORSModel.ors.Vector3) –
-
getCameraPosition(self) → Vector3¶ Gets the location.
Returns: output (ORSModel.ors.Vector3) –
-
getCameraRight(self) → Vector3¶ Gets the right direction.
Returns: output (ORSModel.ors.Vector3) –
-
getCameraUp(self) → Vector3¶ Gets the up direction.
Returns: output (ORSModel.ors.Vector3) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getDepthOfField(self) → float¶ Gets depth of field.
Returns: output (float) –
-
getFarRectangle(self) → Rectangle¶ Get camera far plane.
Returns: output (ORSModel.ors.Rectangle) – the far plane (a Rectangle)
-
getFocalLength(self) → float¶ Gets focal length.
Returns: output (float) –
-
getIsEqualTo(self, aCamera: ORSModel.ors.Camera) → bool¶ Tests if the cameras have the same parameters.
Parameters: aCamera (ORSModel.ors.Camera) – Returns: output (bool) –
-
getLineOfSight(self, positionOnView: ORSModel.ors.Vector3) → Line¶ Get the line of sight of the camera from position on screen.
Note
Origin of the line of sight is the camera position.
Parameters: positionOnView (ORSModel.ors.Vector3) – Returns: output (ORSModel.ors.Line) – the line of sigth (an Line)
-
getLineOfSightOrtho(self) → Line¶ Get the line of sight of the camera.
Note
Origin of the line of sight is the camera position.
Returns: output (ORSModel.ors.Line) – the line of sigth (an Line)
-
getNearRectangle(self) → Rectangle¶ Get camera near plane.
Returns: output (ORSModel.ors.Rectangle) – the near plane (a Rectangle)
-
getOrthoZoomFactor(self) → float¶ method getOrthoZoomFactor
Returns: output (float) –
-
getPythonRepresentation(self) → str¶ Gets a Python evaluable string representation.
Returns: output (str) –
-
getRectangle(self, fDistance: float) → Rectangle¶ Get camera plane at a given distance in the frustum.
Note
The distance is clipped by [getViewPortNear(), getViewPortFar()]
Parameters: fDistance (float) – Returns: output (ORSModel.ors.Rectangle) – the plane (a Rectangle)
-
getRotatedAroundAxis(self, rotationAxis: ORSModel.ors.Vector3, rotationPivot: ORSModel.ors.Vector3, angle: float) → Camera¶ Gets a new camera rotated around an axis around a specified location by an angle.
Parameters: - rotationAxis (ORSModel.ors.Vector3) –
- rotationPivot (ORSModel.ors.Vector3) –
- angle (float) –
Returns: output (ORSModel.ors.Camera) –
-
getSceneNormalizationMatrix(self) → Matrix4x4¶ Get scene normalization matrix.
Returns: output (ORSModel.ors.Matrix4x4) –
-
getSceneNormalizationRotationMatrix(self) → Matrix4x4¶ Get scene normalization matrix.
Returns: output (ORSModel.ors.Matrix4x4) –
-
getSceneNormalizationScaleMatrix(self) → Matrix4x4¶ Get scene normalization matrix.
Returns: output (ORSModel.ors.Matrix4x4) –
-
getSceneNormalizationTranslationMatrix(self) → Matrix4x4¶ Get scene normalization matrix.
Returns: output (ORSModel.ors.Matrix4x4) –
-
getScreenToWorldCoordinate(self, xCoordinate: float, yCoordinate: float) → Vector3¶ Gets screen to world coordinate.
Parameters: - xCoordinate (float) –
- yCoordinate (float) –
Returns: output (ORSModel.ors.Vector3) –
-
getScreenToWorldDirection(self, xCoordinate: float, yCoordinate: float) → Vector3¶ Gets screen to world direction.
Parameters: - xCoordinate (float) –
- yCoordinate (float) –
Returns: output (ORSModel.ors.Vector3) –
-
getUse3DOrthoApproximationProjection(self) → bool¶ Gets 3D ortho approximation projection.
Returns: output (bool) –
-
getUseOrthoProjection(self) → bool¶ Gets ortho projection.
Returns: output (bool) –
-
getViewMatrix(self) → Matrix4x4¶ Gets the equivalent left-handed view matrix.
Returns: output (ORSModel.ors.Matrix4x4) –
-
getViewPortFar(self) → float¶ Gets viewport far.
Returns: output (float) –
-
getViewPortHeight(self) → int¶ Gets viewport height.
Returns: output (int) –
-
getViewPortNear(self) → float¶ Gets viewport near.
Returns: output (float) –
-
getViewPortTopLeftX(self) → int¶ Gets viewport top left x.
Returns: output (int) –
-
getViewPortTopLeftY(self) → int¶ Gets viewport top left y.
Returns: output (int) –
-
getViewPortWidth(self) → int¶ Gets viewport width.
Returns: output (int) –
-
none()¶ Camera.__init__() -> Camera
-
rotateAroundAxis(self, rotationAxis: ORSModel.ors.Vector3, rotationPivot: ORSModel.ors.Vector3, angle: float) → None¶ Rotates the camera around an axis around a specified location by an angle.
Parameters: - rotationAxis (ORSModel.ors.Vector3) –
- rotationPivot (ORSModel.ors.Vector3) –
- angle (float) –
-
setAngleOfView(self, aValue: float) → None¶ Sets angle of view.
Parameters: aValue (float) –
-
setCameraDirection(self, inputVector: ORSModel.ors.Vector3) → None¶ Sets the look at direction.
Parameters: inputVector (ORSModel.ors.Vector3) –
-
setCameraPivot(self, inputVector: ORSModel.ors.Vector3) → None¶ Sets the pivot position.
Parameters: inputVector (ORSModel.ors.Vector3) –
-
setCameraPosition(self, inputVector: ORSModel.ors.Vector3) → None¶ Sets the location.
Parameters: inputVector (ORSModel.ors.Vector3) –
-
setCameraUp(self, inputVector: ORSModel.ors.Vector3) → None¶ Sets the up direction.
Parameters: inputVector (ORSModel.ors.Vector3) –
-
setDepthOfField(self, aValue: float) → None¶ Sets depth of field.
Parameters: aValue (float) –
-
setFocalLength(self, aValue: float) → None¶ Sets focal length.
Parameters: aValue (float) –
-
setFromViewMatrix(self, aMatrix: ORSModel.ors.Matrix4x4) → None¶ Sets the parameters from a left-handed view matrix.
Parameters: aMatrix (ORSModel.ors.Matrix4x4) –
-
setOrthoZoomFactor(self, zoomFactor: float) → None¶ method setOrthoZoomFactor
Parameters: zoomFactor (float) –
-
setSceneNormalizationRotationMatrix(self, aMatrix: ORSModel.ors.Matrix4x4) → None¶ Set scene normalization matrix.
Parameters: aMatrix (ORSModel.ors.Matrix4x4) –
-
setSceneNormalizationScaleMatrix(self, aMatrix: ORSModel.ors.Matrix4x4) → None¶ Set scene normalization matrix.
Parameters: aMatrix (ORSModel.ors.Matrix4x4) –
-
setSceneNormalizationTranslationMatrix(self, aMatrix: ORSModel.ors.Matrix4x4) → None¶ Set scene normalization matrix.
Parameters: aMatrix (ORSModel.ors.Matrix4x4) –
-
setUse3DOrthoApproximationProjection(self, aValue: bool) → None¶ Sets 3D ortho approximationprojection.
Parameters: aValue (bool) –
-
setUseOrthoProjection(self, aValue: bool) → None¶ Sets ortho projection.
Parameters: aValue (bool) –
-
setViewPortFar(self, aValue: float) → None¶ Sets viewport far.
Parameters: aValue (float) –
-
setViewPortHeight(self, aValue: int) → None¶ Sets viewport height.
Parameters: aValue (int) –
-
setViewPortNear(self, aValue: float) → None¶ Sets viewport near.
Parameters: aValue (float) –
-
setViewPortTopLeftX(self, aValue: int) → None¶ Sets viewport top left x.
Parameters: aValue (int) –
-
setViewPortTopLeftY(self, aValue: int) → None¶ Sets viewport top left y.
Parameters: aValue (int) –
-
setViewPortWidth(self, aValue: int) → None¶ Sets viewport width.
Parameters: aValue (int) –
-
Capsule¶
-
class
ORSModel.ors.Capsule¶ Bases:
ORSModel.ors.Shape3Dbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2010
-
createFromPythonRepresentation(aPythonRepresentation: str) → Capsule¶ Create aCapsule from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Capsule) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ set aCapsule from a python representation
Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getAxis(self) → Vector3¶ Returns the normal of theCapsule.
Returns: output (ORSModel.ors.Vector3) – A vector (an Vector3)
-
getCap1Center(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getCap2Center(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getCenter(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getHeight(self) → float¶ GetsCapsule Height.
Returns: output (float) – An Height (a double)
-
getIntersectionWithLine(self, aLine: ORSModel.ors.Line) → LineSegment¶ Parameters: aLine (ORSModel.ors.Line) – Returns: output (ORSModel.ors.LineSegment) –
-
getIntersectionWithLineSegment(self, aLineSegment: ORSModel.ors.LineSegment) → LineSegment¶ Return the vector representing the intersection of the provided line segment and the receiver.
Parameters: aLineSegment (ORSModel.ors.LineSegment) – Returns: output (ORSModel.ors.LineSegment) – a vector (an Vector3) or NULL if not intersection
-
getIsEqualTo(self, Capsule: ORSModel.ors.Capsule) → bool¶ Verifies equality between the receiver and a givenCapsule.
Parameters: Capsule (ORSModel.ors.Capsule) – Returns: output (bool) – TRUE if the argument Capsule is equal to the receiver, FALSE otherwise
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getRadius(self) → float¶ Returns: output (float) –
-
getSurface(self) → float¶ GetsCapsule Surface.
Returns: output (float) – A Surface (a double)
-
getVolume(self) → float¶ GetsCapsule Volume.
Returns: output (float) – A Volume (a double)
-
none()¶ Capsule.__init__() -> Capsule
-
setCap1Center(self, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: aPoint (ORSModel.ors.Vector3) –
-
setCap2Center(self, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: aPoint (ORSModel.ors.Vector3) –
-
setCenter(self, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: aPoint (ORSModel.ors.Vector3) –
-
setRadius(self, aRadius: float) → None¶ Parameters: aRadius (float) –
-
Channel¶
-
class
ORSModel.ors.Channel¶ Bases:
ORSModel.ors.StructuredGridbrief_description: A container for channel data. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: CxvChannel_Description, CxvChannel_Data_Type This is used as a channel data container. Channels are used as 4D data containers, that have a depth, a description, a type, and some spacing for representation. Depth value is directly related to the channel type. To create a channel the XYZT sizes and type must be set before initializing the channel data. The channel must be initialized before the data array is set.
-
addGaussianNoise(std, mean=0)¶ Add gaussian noise to the channel
Parameters: - std (float) – standard deviation
- mean (float) – mean of the gaussian distribution
-
addSlice(self, pSliceData: ORSModel.ors.Array) → None¶ Adds a slice of data to the channel.
Note
The array should be of similar channel type (ArrayUnsignedChar, ArrayUnsignedShort, ArrayUnsignedInt or ArrayFloat).
Note
It is assumed that the slice added is of same shape as the existing slices within the channel.
Note
The slice data is copied to the channel. You are responsible for releasing the array.
Parameters: pSliceData (ORSModel.ors.Array) – the slice data (an Array), see note below
-
addSuggestedWindowLevelValues(self, pWidth: float, pCenter: float) → None¶ Adds a pair of suggested window width and center values (for leveling).
Note
The window width should be >= 1.
Note
The suggested leveling values are only used to present suitable values to end users.
Parameters: - pWidth (float) – a window width (a double)
- pCenter (float) – a window center (a double)
-
applyLevelingTransformationToData(self, minValue: float, maxValue: float) → None¶ Parameters: - minValue (float) –
- maxValue (float) –
-
applyLinearTransformationToData(self, slope: float, offset: float) → None¶ Parameters: - slope (float) –
- offset (float) –
-
convertToType(self, datatype: int, bNormalize: bool, iLowNormalizationRange: float, iHighNormalizationRange: float, bFilter: bool, iLowFilterRange: float, iHighFilterRange: float, iReplacementValue: float, outputChannel: ORSModel.ors.Channel, IProgress: ORSModel.ors.Progress) → Channel¶ Converts the data type of the receiver.
Note
The first argument should be one of CxvChannel_Data_Type (see ors_def.h for valid values).
Parameters: - datatype (int) – the target data type (a uint16_t, see note below)
- bNormalize (bool) – true to normalize the output
- iLowNormalizationRange (float) – lower bound of normalization range (a double)
- iHighNormalizationRange (float) – higher bound of normalization range (a double)
- bFilter (bool) – true to filter the output
- iLowFilterRange (float) – lower bound of filter range (a double)
- iHighFilterRange (float) – higher bound of filter range (a double)
- iReplacementValue (float) – replacement value for the filter (a double)
- outputChannel (ORSModel.ors.Channel) – optional output channel. if none, a new channel will be created (a Channel). output channel must have the number of voxels as the input channel and must have the same datatype aas the target type.
- IProgress (ORSModel.ors.Progress) – a progress object, NULL for no progress (an Progress)
Returns: output (ORSModel.ors.Channel) – a new converted channel (a Channel)
-
copyDICOMAttributesFrom(self, pInputChannel: ORSModel.ors.Channel, bCopyPrivateAttributes: bool) → None¶ Copies the DICOM attributes from another channel.
Parameters: - pInputChannel (ORSModel.ors.Channel) – the source channel (a Channel)
- bCopyPrivateAttributes (bool) – true to copy also private attributes, false to exclude them
-
copyDICOMDatasetForSlice(self, pInputChannel: ORSModel.ors.Channel, iTSource: int, iZSource: int, iTTarget: int, iZTarget: int) → None¶ Copies the DICOM attributes of a given slice to another channel.
Note
If any index is invalid no copy occurs.
Parameters: - pInputChannel (ORSModel.ors.Channel) – the destination channel (a Channel)
- iTSource (int) – T source index (an uint32_t)
- iZSource (int) – Z source index (an uint32_t)
- iTTarget (int) – T target index (an uint32_t)
- iZTarget (int) – Z target index (an uint32_t)
-
copyDataFromCommonRegionInto(self, pAChannel: ORSModel.ors.Channel, tOffset: int, filterMode: int, IProgress: ORSModel.ors.Progress, clearValue: bool) → None¶ Copies the data common with another channel into that channel.
Note
This method copies the data from the receiver into a supplied channel, for the area that is common to both channels. This area is computed based on the world coordinates of both channels.
Parameters: - pAChannel (ORSModel.ors.Channel) – the companion channel (a Channel)
- tOffset (int) – the time step to use in the channel (a uint32_t)
- filterMode (int) – a CxvFiltering_Mode (a uint16_t)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
- clearValue (bool) – true to clear the companion channel before copying the channel (a boolean)
-
copyInto(self, aDestinationChannel: ORSModel.ors.Channel) → None¶ Copies the receiver channel into another channel.
Parameters: aDestinationChannel (ORSModel.ors.Channel) – a destination channel (a Channel)
-
copyShapeFromChannelSubset(self, pISourceChannel: ORSModel.ors.Channel, xmin: int, ymin: int, zmin: int, tmin: int, xmax: int, ymax: int, zmax: int, tmax: int) → None¶ Initializes the channel’s shape based on a subset of another channel.
Note
Shape includes size, spacing, type, description, position and location.
Note
This method does not handle the channel data array.
Parameters: - pISourceChannel (ORSModel.ors.Channel) – a source channel (a Channel)
- xmin (int) – the X lower range (an uint32_t)
- ymin (int) – the Y lower range (an uint32_t)
- zmin (int) – the Z lower range (an uint32_t)
- tmin (int) – the T lower range (an uint32_t)
- xmax (int) – the X upper range (an uint32_t)
- ymax (int) – the Y upper range (an uint32_t)
- zmax (int) – the Z upper range (an uint32_t)
- tmax (int) – the T upper range (an uint32_t)
-
dtype¶
-
emptySuggestedWindowLevelValues(self) → None¶ Cleans the suggested window leveling values.
-
classmethod
fromNDArray(data, channelGUID='', ZAxis=True, TimeAxis=False) → ORSModel.ors.Channel¶
-
getAllSliceIntersectionLength(self, arrayOfIntersectionLengthPerSlice: float, timeStep: int) → float¶ Parameters: - arrayOfIntersectionLengthPerSlice (float) –
- timeStep (int) –
Returns: output (float) –
-
getAllSlicesHaveSameOrientation(self, pTIndex: int) → bool¶ Verifies if the channel is consistent in its slice orientations.
Note
Normally a channel has consistent slice orientations, but in some poorly formed DICOM datasets it can happen that slices do not have the same orientation. Those channels become of limited use.
Parameters: pTIndex (int) – Returns: output (bool) – true if all slices have identical orientations, false otherwise
-
getAreAllZSlicesDataAvailable(self) → bool¶ Gets the availability of all the Z slices’ data.
Note
The channel can be set to work in “lazy” mode, where slices are made available as they are read.
Note
Use this method to know if the entire data has arrived, instead of querying each slice with getIsZSliceDataAvailable().
Returns: output (bool) – true if all the Z slices’ data is available, false otherwise
-
getAsAbsoluteDifferenceChannel(self, pCompareChannel: ORSModel.ors.Channel, pOutputChannel: ORSModel.ors.Channel, IProgress: ORSModel.ors.Progress) → None¶ Gets a channel of the same type as the receiver containing the absolute difference between the two.
Note
The provided channel serves as the reference grid and the receiver is linearly interpolated.
Parameters: - pCompareChannel (ORSModel.ors.Channel) – the channel to compare with (a Channel)
- pOutputChannel (ORSModel.ors.Channel) – the output channel (a Channel)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
-
getAsChannelClosedWithKernel(self, pKernel: ORSModel.ors.ConvolutionKernel, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Creates a new channel which is the receiver dilated and afterward eroded with the provided kernel.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the closing kernel made of 0 or 1 (a ConvolutionKernel)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress), or NULL for no progress
- pOutChannel (ORSModel.ors.Channel) – channel to put the result in (can be the receiver) (a Channel)
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelCrossSection(self, path: ORSModel.ors.VisualPath, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, x: int, y: int, pInChannel: ORSModel.ors.Channel) → Channel¶ Samples the channel data for a given path.
Note
This method finds all the voxel data found along a path, and fills another channel with that data.
Note
The X and Y sizes define a box that will contain the data along the path.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: - path (ORSModel.ors.VisualPath) – the path to sample (an VisualPath)
- iTIndex (int) – an X size (an uint32_t), see note below
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – a Y size (an uint32_t), see note below
- x (int) – The T index to be processed (an uint32_t)
- y (int) – an optional output channel (a Channel)
- pInChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelCurved(self, pIInputChannel: ORSModel.ors.Channel, path: ORSModel.ors.VisualPath, aTransformationMatrix: ORSModel.ors.Matrix4x4, forTimeStep: int, xAxisDirectionX: float, xAxisDirectionY: float, xAxisDirectionZ: float, xSize: int, ySize: int, xSpacing: float, bestYSizeAndSpacing: bool, bNearest: bool) → Channel¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- path (ORSModel.ors.VisualPath) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- forTimeStep (int) –
- xAxisDirectionX (float) –
- xAxisDirectionY (float) –
- xAxisDirectionZ (float) –
- xSize (int) –
- ySize (int) –
- xSpacing (float) –
- bestYSizeAndSpacing (bool) –
- bNearest (bool) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelCurvedProjected(self, pIInputChannel: ORSModel.ors.Channel, path: ORSModel.ors.VisualPath, aTransformationMatrix: ORSModel.ors.Matrix4x4, forTimeStep: int, upVect: ORSModel.ors.Vector3, rightVect: ORSModel.ors.Vector3, xSize: int, ySize: int, optimalXSizeAndSpacing: bool, optimalYSizeAndSpacing: bool, zSliceTickness: float, minProjection: bool, maxProjection: bool, averageProjection: bool, stretch: bool, bNearest: bool) → Channel¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- path (ORSModel.ors.VisualPath) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- forTimeStep (int) –
- upVect (ORSModel.ors.Vector3) –
- rightVect (ORSModel.ors.Vector3) –
- xSize (int) –
- ySize (int) –
- optimalXSizeAndSpacing (bool) –
- optimalYSizeAndSpacing (bool) –
- zSliceTickness (float) –
- minProjection (bool) –
- maxProjection (bool) –
- averageProjection (bool) –
- stretch (bool) –
- bNearest (bool) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelCurvedProjectedRotational(self, pIInputChannel: ORSModel.ors.Channel, path: ORSModel.ors.VisualPath, aTransformationMatrix: ORSModel.ors.Matrix4x4, forTimeStep: int, upVect: ORSModel.ors.Vector3, rightVect: ORSModel.ors.Vector3, xSize: int, numberOfStep: int, bNearest: bool, IProgress: ORSModel.ors.Progress) → Channel¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- path (ORSModel.ors.VisualPath) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- forTimeStep (int) –
- upVect (ORSModel.ors.Vector3) –
- rightVect (ORSModel.ors.Vector3) –
- xSize (int) –
- numberOfStep (int) –
- bNearest (bool) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelCurvedRotational(self, pIInputChannel: ORSModel.ors.Channel, path: ORSModel.ors.VisualPath, aTransformationMatrix: ORSModel.ors.Matrix4x4, forTimeStep: int, normalX: float, normalY: float, normalZ: float, downX: float, downY: float, downZ: float, xSize: int, ySize: int, numberOfStep: int, xSpacing: float, bestYSizeAndSpacing: bool) → Channel¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- path (ORSModel.ors.VisualPath) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- forTimeStep (int) –
- normalX (float) –
- normalY (float) –
- normalZ (float) –
- downX (float) –
- downY (float) –
- downZ (float) –
- xSize (int) –
- ySize (int) –
- numberOfStep (int) –
- xSpacing (float) –
- bestYSizeAndSpacing (bool) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelCutAlongZWithNormal(self, normal: ORSModel.ors.Vector3, timeStep: int, outXSizeInworld: float, nearest: bool, inputChannel: ORSModel.ors.Channel) → Channel¶ Parameters: - normal (ORSModel.ors.Vector3) –
- timeStep (int) –
- outXSizeInworld (float) –
- nearest (bool) –
- inputChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelCutAlongZWithNormalCurved(self, InputPath: ORSModel.ors.VisualPath, aTransformationMatrix: ORSModel.ors.Matrix4x4, normal: ORSModel.ors.Vector3, timeStep: int, outXSizeInworld: float, nearest: bool, inputChannel: ORSModel.ors.Channel) → Channel¶ Parameters: - InputPath (ORSModel.ors.VisualPath) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- normal (ORSModel.ors.Vector3) –
- timeStep (int) –
- outXSizeInworld (float) –
- nearest (bool) –
- inputChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelDilatedWithKernel(self, pKernel: ORSModel.ors.ConvolutionKernel, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Creates a new channel which is the receiver dilated with the provided kernel.
Note
the simple tone of gray dilatation is a convolution operation selecting the maximum value in the kernel
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the dilatation kernel made of 0 or 1 (an ConvolutionKernel)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress), or NULL for no progress
- pOutChannel (ORSModel.ors.Channel) – channel to put the result in (can be the receiver) (a Channel)
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelDilatedWithKernelInRange(self, pKernel: ORSModel.ors.ConvolutionKernel, zmin: int, zmax: int, zOffsetInputToOutput: int, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Computes the dilation of the input channel in a range of slices.
Note
If no channel is provided to put the result in, a new channel is created with the number of slices corresponding to the number of slices computed.
Note
When the output channel have the same characteristics as the input channel, the output channel is not re-initialized before writing in the result of the dilation of the desired slices.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the dilatation kernel made of 0 or 1 (an ConvolutionKernel)
- zmin (int) – the index of the first slice to compute the dilation on
- zmax (int) – the index of the last slice to compute the dilation on
- zOffsetInputToOutput (int) – the number of slices of offset (the dilation on the slice Z of the input channel will be written at the slice “Z-offset” in the output channel)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress), or NULL for no progress
- pOutChannel (ORSModel.ors.Channel) – the channel to put the result in (cannot be the receiver) (a Channel)
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelEmptyCrossSection(self, path: ORSModel.ors.VisualPath, aTransformationMatrix: ORSModel.ors.Matrix4x4, x: int, y: int, z: int, timeStep: int, pInChannel: ORSModel.ors.Channel) → Channel¶ Samples the channel data for a given path.
Note
This method finds all the voxel data found along a path, and fills another channel with that data.
Note
The X and Y sizes define a box that will contain the data along the path.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: - path (ORSModel.ors.VisualPath) – the path to sample (an VisualPath)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – an X size (a uint32_t), see note below
- x (int) – a Y size (a uint32_t), see note below
- y (int) – true to have the channel contain the voxel indicies, false to contain the voxel themselves
- z (int) – an optional output channel (a Channel)
- timeStep (int) –
- pInChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelErodedWithKernel(self, pKernel: ORSModel.ors.ConvolutionKernel, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Creates a new channel which is the receiver eroded with the provided kernel.
Note
the simple tone of grey erosion is a convolution operation selecting the minimum value in the kernel
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the erosion kernel made of 0 or 1 (an ConvolutionKernel)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress), or none for no progress
- pOutChannel (ORSModel.ors.Channel) – channel to put the result in (can be the receiver) (a Channel)
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelErodedWithKernelInRange(self, pKernel: ORSModel.ors.ConvolutionKernel, zmin: int, zmax: int, zOffsetInputToOutput: int, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Computes the erosion of the input channel in a range of slices.
Note
If no channel is provided to put the result in, a new channel is created with the number of slices corresponding to the number of slices computed.
Note
When the output channel have the same characteristics as the input channel, the output channel is not re-initialized before writing in the result of the erosion of the desired slices.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the erosion kernel made of 0 or 1 (an ConvolutionKernel)
- zmin (int) – the index of the first slice to compute the erosion on
- zmax (int) – the index of the last slice to compute the erosion on
- zOffsetInputToOutput (int) – the number of slices of offset (the erosion on the slice Z of the input channel will be written at the slice “Z-offset” in the output channel)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress), or NULL for no progress
- pOutChannel (ORSModel.ors.Channel) – the channel to put the result in (cannot be the receiver) (a Channel)
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelFromMean(self, pBoxSize: int, pOutChannel: ORSModel.ors.Channel) → Channel¶ Finds the mean in a box surrounding each voxel and writes it to the channel.
Note
The box size needs to be an odd number.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: - pBoxSize (int) – the box size (a uint16_t)
- pOutChannel (ORSModel.ors.Channel) – an optional output channel (an ORSChannelPtr)
Returns: output (ORSModel.ors.Channel) – the result channel (an ORSChannelPtr)
-
getAsChannelFromROI(self, pInputROI: ORSModel.ors.ROI, pOutChannel: ORSModel.ors.Channel) → Channel¶ Creates a new channel from a given Region of Interest.
Note
This method extracts the channel data matching the given Region of Interest into the resulting channel.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: pInputROI (ORSModel.ors.ROI) – a region of interest (an ROI)
Returns: - output (ORSModel.ors.Channel) – a result channel (a Channel)
- pOutChannel (ORSModel.ors.Channel) – an optional output channel (a Channel)
-
getAsChannelGaussianSmoothed(self, kernelSize: int, pOutChannel: ORSModel.ors.Channel) → Channel¶ Applies a 2 sigma gaussian convolution.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: - kernelSize (int) – the kernel size (a uint16_t, should be an odd number)
- pOutChannel (ORSModel.ors.Channel) – an optional output channel (an ORSChannelPtr)
Returns: output (ORSModel.ors.Channel) – the resulting channel (an ORSChannelPtr)
-
getAsChannelObliqueAverageFromRectangleBetweenPlanes(self, pIInputChannel: ORSModel.ors.Channel, forTimeStep: int, aBoundedPlane: ORSModel.ors.Rectangle, startPlane: ORSModel.ors.Plane, endPlane: ORSModel.ors.Plane, xSize: int, ySize: int, nbZSlice: int, zSliceThickness: float, fitOnData: bool, uniformSpacing: bool, bOptimalSizeAndSpacingInXY: bool, bOptimalSizeAndSpacingInZ: bool, nearest: bool, IProgress: ORSModel.ors.Progress) → Channel¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- forTimeStep (int) –
- aBoundedPlane (ORSModel.ors.Rectangle) –
- startPlane (ORSModel.ors.Plane) –
- endPlane (ORSModel.ors.Plane) –
- xSize (int) –
- ySize (int) –
- nbZSlice (int) –
- zSliceThickness (float) –
- fitOnData (bool) –
- uniformSpacing (bool) –
- bOptimalSizeAndSpacingInXY (bool) –
- bOptimalSizeAndSpacingInZ (bool) –
- nearest (bool) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelObliqueFromRectangleBetweenPlanes(self, pIInputChannel: ORSModel.ors.Channel, forTimeStep: int, aBoundedPlane: ORSModel.ors.Rectangle, startPlane: ORSModel.ors.Plane, endPlane: ORSModel.ors.Plane, xSize: int, ySize: int, nbZSlice: int, fitOnData: bool, uniformSpacing: bool, bOptimalSizeAndSpacingInXY: bool, bOptimalSizeAndSpacingInZ: bool, nearest: bool, IProgress: ORSModel.ors.Progress) → Channel¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- forTimeStep (int) –
- aBoundedPlane (ORSModel.ors.Rectangle) –
- startPlane (ORSModel.ors.Plane) –
- endPlane (ORSModel.ors.Plane) –
- xSize (int) –
- ySize (int) –
- nbZSlice (int) –
- fitOnData (bool) –
- uniformSpacing (bool) –
- bOptimalSizeAndSpacingInXY (bool) –
- bOptimalSizeAndSpacingInZ (bool) –
- nearest (bool) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelObliqueMaxIntensityProjectionFromRectangleBetweenPlanes(self, pIInputChannel: ORSModel.ors.Channel, forTimeStep: int, aBoundedPlane: ORSModel.ors.Rectangle, startPlane: ORSModel.ors.Plane, endPlane: ORSModel.ors.Plane, xSize: int, ySize: int, nbZSlice: int, zSliceThickness: float, fitOnData: bool, uniformSpacing: bool, bOptimalSizeAndSpacingInXY: bool, bOptimalSizeAndSpacingInZ: bool, nearest: bool, IProgress: ORSModel.ors.Progress) → Channel¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- forTimeStep (int) –
- aBoundedPlane (ORSModel.ors.Rectangle) –
- startPlane (ORSModel.ors.Plane) –
- endPlane (ORSModel.ors.Plane) –
- xSize (int) –
- ySize (int) –
- nbZSlice (int) –
- zSliceThickness (float) –
- fitOnData (bool) –
- uniformSpacing (bool) –
- bOptimalSizeAndSpacingInXY (bool) –
- bOptimalSizeAndSpacingInZ (bool) –
- nearest (bool) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelObliqueMinIntensityProjectionFromRectangleBetweenPlanes(self, pIInputChannel: ORSModel.ors.Channel, forTimeStep: int, aBoundedPlane: ORSModel.ors.Rectangle, startPlane: ORSModel.ors.Plane, endPlane: ORSModel.ors.Plane, xSize: int, ySize: int, nbZSlice: int, zSliceThickness: float, fitOnData: bool, uniformSpacing: bool, bOptimalSizeAndSpacingInXY: bool, bOptimalSizeAndSpacingInZ: bool, nearest: bool, IProgress: ORSModel.ors.Progress) → Channel¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- forTimeStep (int) –
- aBoundedPlane (ORSModel.ors.Rectangle) –
- startPlane (ORSModel.ors.Plane) –
- endPlane (ORSModel.ors.Plane) –
- xSize (int) –
- ySize (int) –
- nbZSlice (int) –
- zSliceThickness (float) –
- fitOnData (bool) –
- uniformSpacing (bool) –
- bOptimalSizeAndSpacingInXY (bool) –
- bOptimalSizeAndSpacingInZ (bool) –
- nearest (bool) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Channel) –
-
getAsChannelOpenWithKernel(self, pKernel: ORSModel.ors.ConvolutionKernel, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Creates a new channel which is the receiver eroded and afterwards dilated with the provided kernel.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the opening kernel made of 0 or 1 (an ConvolutionKernel)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress), or none for no progress
- pOutChannel (ORSModel.ors.Channel) – the channel to put the result in (can be the receiver) (a Channel)
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelPadded(self, xPadd: int, yPadd: int, zPadd: int, pValue: float, pOutChannel: ORSModel.ors.Channel) → Channel¶ Pads the channel with a normalized value.
Note
The 3 padding values are applied to the beginning and end of each dimension.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: - xPadd (int) – the X padding in pixels (an uint32_t, see note below)
- yPadd (int) – the Y padding in pixels (an uint32_t, see note below)
- zPadd (int) – the Z padding in pixels (an uint32_t, see note below)
- pValue (float) – the padding value, normalized (a double)
- pOutChannel (ORSModel.ors.Channel) – an optional output channel (an ORSChannelPtr)
Returns: output (ORSModel.ors.Channel) – the resulting channel (an ORSChannelPtr)
-
getAsChannelSampled(self, samplingMethod: int, newXSize: int, newYSize: int, newZSize: int, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Samples the channel according to a sampling method.
Note
This method samples the source channel and produces an output channel according to the sampling method specified.
Note
If a target channel is supplied, data is written to it and the channel is returned as a result, otherwise a new channel is created.
Note
See the ORS_def.h file for enum CxvSamplingMethod values.
Parameters: - samplingMethod (int) – a CxvSamplingMethod (a uint16_t)
- newXSize (int) – the new X size (an uint32_t)
- newYSize (int) – the new Y size (an uint32_t)
- newZSize (int) – the new Z size (an uint32_t)
- IProgress (ORSModel.ors.Progress) – progress object (NULL for no progress bar)
- pOutChannel (ORSModel.ors.Channel) – a target channel (a Channel)
Returns: output (ORSModel.ors.Channel) – the resulting channel (a Channel)
-
getAsChannelSampledConverted(self, samplingMethod: int, newXSize: int, newYSize: int, newZSize: int, datatype: int, bNormalize: bool, iLowNormalizationRange: float, iHighNormalizationRange: float, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Samples the channel according to a sampling method, and converts its type.
Note
This method samples the source channel and produces an output channel according to the sampling method specified.
Note
If a target channel is supplied, data is written to it and the channel is returned as a result, otherwise a new channel is created.
Note
See the ORS_def.h file for enum CxvSamplingMethod values.
Parameters: - samplingMethod (int) – a CxvSamplingMethod (a uint16_t)
- newXSize (int) – the new X size (an uint32_t)
- newYSize (int) – the new Y size (an uint32_t)
- newZSize (int) – the new Z size (an uint32_t)
- datatype (int) – the target data type (a uint16_t, see note below)
- bNormalize (bool) – true to normalize the output
- iLowNormalizationRange (float) – lower bound of normalization range (a double)
- iHighNormalizationRange (float) – higher bound of normalization range (a double)
- IProgress (ORSModel.ors.Progress) – progress object (NULL for no progress bar)
- pOutChannel (ORSModel.ors.Channel) – a target channel (a Channel)
Returns: output (ORSModel.ors.Channel) – the resulting channel (a Channel)
-
getAsChannelSampledInterpolatedFromPlane(self, a: float, b: float, c: float, d: float, upX: float, upY: float, upZ: float, timeStep: int, pInChannel: ORSModel.ors.Channel) → Channel¶ Samples the channel data for a given plane, interpolating the voxels.
Note
The general plane equation is ax + by + cz + dw = 0.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: - a (float) – The bounded plane
- b (float) – true to have the channel contain the voxel indicies, false to contain the voxel themselves
- c (float) – an optional output channel (a Channel)
- d (float) –
- upX (float) –
- upY (float) –
- upZ (float) –
- timeStep (int) –
- pInChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelSampledInterpolatedFromPlane2(self, aBoundedPlane: ORSModel.ors.Rectangle, nearest: bool, timeStep: int, pInChannel: ORSModel.ors.Channel) → Channel¶ Samples the channel data for a given plane, interpolating the voxels.
Note
The general plane equation is ax + by + cz + dw = 0.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: - aBoundedPlane (ORSModel.ors.Rectangle) – The bounded plane
- nearest (bool) – true to have the channel contain the voxel indicies, false to contain the voxel themselves
- timeStep (int) – an optional output channel (a Channel)
- pInChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelWithEqualizedHistogram(self, anHistogram: ORSModel.ors.HistogramData, normalizeData: bool, zmin: int, zmax: int, zOffsetInputToOutput: int, pIOutputChannel: ORSModel.ors.Channel) → Channel¶ Creates a new channel with the data of the receiver transformed to equalize its histogram.
Note
algorithm to be descibed later
Parameters: - anHistogram (ORSModel.ors.HistogramData) – histogram to be used for the equalization (OPTIONAL)
- normalizeData (bool) – true if the output has to be normalized to the total spread of the data type (unsigned char [0,255] unsigned short [0,65535] float[0,1])
- zmin (int) – the channel to be filled with the result (can be the receiver ) (a Channel)
- zmax (int) –
- zOffsetInputToOutput (int) –
- pIOutputChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) – a result channel (a Channel)
-
getAsChannelWithinRange(self, minValue: float, maxValue: float, lowerReplacementValue: float, upReplacementValue: float, pIInputChannel: ORSModel.ors.Channel) → Channel¶ Creates a new channel within a given range.
Note
This method creates a new channel having the same shape (characteristics) as the receiver. It extracts the channel data that falls within the given range of data into the resulting channel. The lower and upper replacement values define what value gets written to the resulting channel for the data falling outside the given range.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: - minValue (float) – the lower boundary of the range (a double)
- maxValue (float) – the upper boundary of the range (a double)
- lowerReplacementValue (float) – the lower replacement value (a double, see note)
- upReplacementValue (float) – the upper replacement value (a double, see note)
Returns: - output (ORSModel.ors.Channel) – a result channel (a Channel)
- pIInputChannel (ORSModel.ors.Channel) – an optional output channel (a Channel)
-
getAsMarchingCubeMesh(self, isovalue: float, bSnapToContour: bool, flipNormal: bool, timeStep: int, xSample: int, ySample: int, zSample: int, pNearest: bool, pWorld: bool, pProgress: ORSModel.ors.Progress, pMesh: ORSModel.ors.Mesh) → Mesh¶ Creates a marching cube from the channel.
Note
The isovalue is used as a threshold, any value below it (inclusive) is not considered.
Note
The channel needs to have a minimum size of 3 in its X, Y and Z axis.
Note
If a mesh model is supplied as the last argument, the results are written to it, otherwise a new mesh model is created.
Note
If a progress object is supplied, a cancellable progress bar will be displayed, otherwise no progression is shown.
Parameters: - isovalue (float) – an isovalue (a double)
- bSnapToContour (bool) – true to snap vertices to contour, false to interpolate
- flipNormal (bool) – true flips normals, false doesn’t
- timeStep (int) – the time step to use in the channel (an uint32_t)
- xSample (int) – the X sampling (a uint16_t, 1 means no sampling)
- ySample (int) – the Y sampling (a uint16_t, 1 means no sampling)
- zSample (int) – the Z sampling (a uint16_t, 1 means no sampling)
- pNearest (bool) – true to sample to nearest value, false to sample linearly (if sampling is 1 this flag is ignored)
- pWorld (bool) – true to have the resulting mesh in world coordinates, false in local
- pProgress (ORSModel.ors.Progress) – a progress object (an ORSProgressPtr) to show a progress bar, NULL doesn’t show one
Returns: - output (ORSModel.ors.Mesh) – the resulting mesh model (an ORSMeshPtr)
- pMesh (ORSModel.ors.Mesh) – an optional output mesh model (an ORSMeshPtr)
-
getAsMultiROIInArea(self, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, IProgress: ORSModel.ors.Progress, pInputMultiROI: ORSModel.ors.MultiROI) → MultiROI¶ Creates a labeled region of interest (MultiROI) from a specified channel area, within supplied ranges.
Note
If a target MultiROI is supplied, data is written to it and returned, otherwise a new MultiROI is created.
Note
The area is expressed in X, Y and Z min/max pairs.
Parameters: - minX (int) – an X minimum coordinate, in pixel size (an uint32_t)
- minY (int) – a Y minimum coordinate, in pixel size (an uint32_t)
- minZ (int) – a Z minimum coordinate, in pixel size (an uint32_t)
- maxX (int) – an X maximum coordinate, in pixel size (an uint32_t)
- maxY (int) – a Y maximum coordinate, in pixel size (an uint32_t)
- maxZ (int) – a Z maximum coordinate, in pixel size (an uint32_t)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress) or NULL for no progress
- pInputMultiROI (ORSModel.ors.MultiROI) – a target ROI (an ROI)
Returns: output (ORSModel.ors.MultiROI) – the resulting ROI (an ROI)
-
getAsROIWithinRange(self, minValue: float, maxValue: float, IProgress: ORSModel.ors.Progress, pInputROI: ORSModel.ors.ROI) → ROI¶ Creates a region of interest (ROI) from all the channel data within a given range.
Note
The range must be supplied in a normalized fashion, no matter the data type of the channel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - minValue (float) – the lower range, a normalized value (a double)
- maxValue (float) – the upper range, a normalized value (a double)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress) or NULL for no progress
- pInputROI (ORSModel.ors.ROI) – a target ROI (an ROI)
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIWithinRangeInArea(self, minValue: float, maxValue: float, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, IProgress: ORSModel.ors.Progress, pOutputROI: ORSModel.ors.ROI) → ROI¶ Creates a region of interest (ROI) from a specified channel area, within a range.
Note
The range must be supplied in a normalized fashion, no matter the data type of the channel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Note
The area is expressed in X, Y and Z min/max pairs.
Parameters: - minValue (float) – the lower range, a normalized value (a double)
- maxValue (float) – the upper range, a normalized value (a double)
- minX (int) – an X minimum coordinate, in pixel size (an uint32_t)
- minY (int) – a Y minimum coordinate, in pixel size (an uint32_t)
- minZ (int) – a Z minimum coordinate, in pixel size (an uint32_t)
- maxX (int) – an X maximum coordinate, in pixel size (an uint32_t)
- maxY (int) – a Y maximum coordinate, in pixel size (an uint32_t)
- maxZ (int) – a Z maximum coordinate, in pixel size (an uint32_t)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress) or NULL for no progress
- pOutputROI (ORSModel.ors.ROI) – a target ROI (an ROI)
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIWithinRangeInterpolated(self, minValue: float, maxValue: float, IProgress: ORSModel.ors.Progress, pInputROI: ORSModel.ors.ROI, cubic: bool) → ROI¶ Creates a region of interest (ROI) from all the channel data within a given range.
Note
The range must be supplied in a normalized fashion, no matter the data type of the channel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - minValue (float) – the lower range, a normalized value (a double)
- maxValue (float) – the upper range, a normalized value (a double)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress) or NULL for no progress
- pInputROI (ORSModel.ors.ROI) – a target ROI (an ROI)
- cubic (bool) –
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIWithinRanges(self, rangeDuplets: float, nbRangeDuplets: int, IProgress: ORSModel.ors.Progress, pInputROI: ORSModel.ors.ROI) → ROI¶ Creates a region of interest (ROI) from all the channel data within the given ranges.
Note
The ranges must be supplied in a normalized fashion, no matter the data type of the channel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - rangeDuplets (float) – the pairs of ranges (a double*)
- nbRangeDuplets (int) – number of pairs (a uint16_t), so rangeDuplet size should be nbRangeDuplet*2
- IProgress (ORSModel.ors.Progress) – a target ROI (an ROI)
- pInputROI (ORSModel.ors.ROI) – a progress object (an Progress) or NULL for no progress
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIWithinRangesInArea(self, rangeDuplet: float, nbRangeDuplet: int, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, IProgress: ORSModel.ors.Progress, pInputROI: ORSModel.ors.ROI) → ROI¶ Creates a region of interest (ROI) from a specified channel area, within supplied ranges.
Note
The ranges must be supplied in a normalized fashion, no matter the data type of the channel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Note
The area is expressed in X, Y and Z min/max pairs.
Parameters: - rangeDuplet (float) – the pairs of ranges (a double*)
- nbRangeDuplet (int) – number of pairs (a uint16_t), so rangeDuplet size should be nbRangeDuplet*2
- minX (int) – an X minimum coordinate, in pixel size (an uint32_t)
- minY (int) – a Y minimum coordinate, in pixel size (an uint32_t)
- minZ (int) – a Z minimum coordinate, in pixel size (an uint32_t)
- maxX (int) – an X maximum coordinate, in pixel size (an uint32_t)
- maxY (int) – a Y maximum coordinate, in pixel size (an uint32_t)
- maxZ (int) – a Z maximum coordinate, in pixel size (an uint32_t)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress) or NULL for no progress
- pInputROI (ORSModel.ors.ROI) – a target ROI (an ROI)
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAttenuationOnLine(self, aLine: ORSModel.ors.Line, attenuationFactor: float, timeStep: int, spacing: float, bNormalize: bool, bConvertToPhysicalUnits: bool) → float¶ Calculates the attenuation on the line.
Parameters: - aLine (ORSModel.ors.Line) – a line
- attenuationFactor (float) – the timestep
- timeStep (int) – the number of samples required (an int)
- spacing (float) – true normalizes the results, false doesn’t
- bNormalize (bool) – true returns the values in physical units, false doesn’t
- bConvertToPhysicalUnits (bool) –
Returns: output (float) –
-
getBitCount(self) → int¶ Gets the number of bits used to represent one pixel.
Note
It can be 8, 16 or 32.
Returns: output (int) – the bit count (a uint16_t)
-
getByteCountPerSample(self) → int¶ Returns: output (int) –
-
getChannelLocalMaxAsROI(self, pKernel: ORSModel.ors.ConvolutionKernel, fMinValue: float, fMaxValue: float, pOutROI: ORSModel.ors.ROI) → ROI¶ Find the local maximum of a dataset and returns it into a volumeROI.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – a minimum thresholdValue under which the localMax found are ignored (double)
- fMinValue (float) – a maximum thresholdValue over which the localMax found are ignored (double)
- fMaxValue (float) – an output ROI
- pOutROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.ROI) –
-
getChannelLocalMinAsROI(self, pKernel: ORSModel.ors.ConvolutionKernel, fMinValue: float, fMaxValue: float, pOutROI: ORSModel.ors.ROI) → ROI¶ Find the local minimum of a dataset and returns it into a volumeROI.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – a minimum thresholdValue under which the localMin found are ignored (double)
- fMinValue (float) – a maximum thresholdValue over which the localMin found are ignored (double)
- fMaxValue (float) – an output ROI
- pOutROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.ROI) –
-
classmethod
getClassDenomination()¶
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getClassicalStandardDeviation(self) → float¶ Computes the standard deviation.
Returns: output (float) – the standard deviation (a float)
-
getClipBox(timestep=0, display=None)¶ Gets the clip box of the channel
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: aClipBox (ORSModel.ors.Box) – the clip box
-
getClipping(timestep=0, display=None)¶ Gets the origin and the opposite summit of the clip box of the channel
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: - clipOriginSummit (ORSModel.ors.Vector3) – the origin summit of the clip box
- clipOppositeSummit (ORSModel.ors.Vector3) – the origin opposite summit of the clip box
-
getDICOMAttribute(self, iTIndex: int, iZIndex: int, pGroup: int, pElement: int, bSearchSubs: bool) → str¶ Parameters: - iTIndex (int) –
- iZIndex (int) –
- pGroup (int) –
- pElement (int) –
- bSearchSubs (bool) –
Returns: output (str) –
-
getDICOMAttributeAsDouble(self, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bSearchSubs: bool) → float¶ Retrieves a DICOM attribute as a double.
Note
Applicable to the following VRs: DS, FD.
Note
To distinguish between a return value of 0 because the attribute is absent, check for the presence of the attribute with hasDICOMAttribute().
Parameters: - iTIndex (int) – the T index (an uint32_t)
- iZIndex (int) – the slice index (an uint32_t)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bSearchSubs (bool) – true to search sequences, false otherwise
Returns: output (float) – the value (a double)
-
getDICOMAttributeAsFloat(self, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bSearchSubs: bool) → float¶ Retrieves a DICOM attribute as a float.
Note
Applicable to the following VRs: FL, OF.
Note
To distinguish between a return value of 0 because the attribute is absent, check for the presence of the attribute with hasDICOMAttribute().
Parameters: - iTIndex (int) – the T index (an uint32_t)
- iZIndex (int) – the slice index (an uint32_t)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bSearchSubs (bool) – true to search sequences, false otherwise
Returns: output (float) – the value (a float)
-
getDICOMAttributeAsInt(self, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bSearchSubs: bool) → int¶ Retrieves a DICOM attribute as a signed 32 bit number.
Note
Applicable to the following VRs: IS, SL, SS, UL, US.
Note
To distinguish between a return value of 0 because the attribute is absent, check for the presence of the attribute with hasDICOMAttribute().
Parameters: - iTIndex (int) – the T index (an uint32_t)
- iZIndex (int) – the slice index (an uint32_t)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bSearchSubs (bool) – true to search sequences, false otherwise
Returns: output (int) – the value (an int)
-
getDICOMAttributeAsShort(self, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bSearchSubs: bool) → int¶ Retrieves a DICOM attribute as a signed 16 bit number.
Note
Applicable to the following VRs: SS.
Note
To distinguish between a return value of 0 because the attribute is absent, check for the presence of the attribute with hasDICOMAttribute().
Parameters: - iTIndex (int) – the T index (an uint32_t)
- iZIndex (int) – the slice index (an uint32_t)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bSearchSubs (bool) – true to search sequences, false otherwise
Returns: output (int) – the value (a short)
-
getDICOMAttributeAsUnsignedInt(self, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bSearchSubs: bool) → int¶ Retrieves a DICOM attribute as an unsigned 32 bit number.
Note
Applicable to the following VRs: UL.
Note
The success is indicated in the seventh argument. If you’re not interested in the success, you can use NULL.
Parameters: - iTIndex (int) – the T index (an uint32_t)
- iZIndex (int) – the slice index (an uint32_t)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bSearchSubs (bool) – true to search sequences, false otherwise
Returns: output (int) – the value (a uint32_t)
-
getDICOMAttributeAsUnsignedShort(self, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bSearchSubs: bool) → int¶ Retrieves a DICOM attribute as an unsigned 16 bit number.
Note
Applicable to the following VRs: OW, US.
Note
To distinguish between a return value of 0 because the attribute is absent, check for the presence of the attribute with hasDICOMAttribute().
Parameters: - iTIndex (int) – the T index (an uint32_t)
- iZIndex (int) – the slice index (an uint32_t)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bSearchSubs (bool) – true to search sequences, false otherwise
Returns: output (int) – the value (a uint16_t)
-
getDICOMAttributeFromSequence(self, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iItemNo: int, iElementGroup: int, iElementElement: int) → str¶ Parameters: - iTIndex (int) –
- iZIndex (int) –
- iGroup (int) –
- iElement (int) –
- iItemNo (int) –
- iElementGroup (int) –
- iElementElement (int) –
Returns: output (str) –
-
getDICOMContainer(self, iTIndex: int, iZIndex: int) → str¶ Parameters: - iTIndex (int) –
- iZIndex (int) –
Returns: output (str) –
-
getDataDescription(self) → int¶ Gets the channel description.
Note
enum CxvChannel_Description (in ORS_def.h) is used to categorize channels.
Returns: output (int) – a description index (a int32_t)
-
getDataRange(self) → float¶ Gets the size of the spread of data.
Note
Unless a value was supplied via setDataRange(), the value returned by this method is assumed to cover the spread of the data type (i.e. for unsigned short it will return 2^16). Float channels are an exception, where the true data range will be computed from the smallest and largest value found in the channel (because the computed spread is too large).
Returns: output (float) – a value (a double)
-
getDataType(self) → int¶ Gets the channel data type.
Note
See CxvChannel_Data_Type (in ORS_def.h) for supported types.
Returns: output (int) – a type (a int32_t)
-
getDataUnit(self) → str¶ Returns: output (str) –
-
getHasDICOMAttributes(self) → bool¶ Checks to see if the channel has DICOM attributes.
Returns: output (bool) – true if DICOM attributes exist, false otherwise
-
getHasSliceOrientationAndPosition(self) → bool¶ Queries the channel to know if it has slice orientation and position.
Note
All channels have a zero origin orientation and position, but some channels have a greater level of detail, where each slice has orientation and position data.
Returns: output (bool) – true if it does, false otherwise
-
getInitialWindowLevelCenter(self) → float¶ Returns: output (float) –
-
getInitialWindowLevelWidth(self) → float¶ Returns: output (float) –
-
getInterpolatedLineSegment(self, pLineSegment: ORSModel.ors.LineSegment, nTIndex: int, fSpacing: float, nInterpolationMethod: int, values: ORSModel.ors.Array) → Array¶ Parameters: - pLineSegment (ORSModel.ors.LineSegment) –
- nTIndex (int) –
- fSpacing (float) –
- nInterpolationMethod (int) –
- values (ORSModel.ors.Array) –
Returns: output (ORSModel.ors.Array) –
-
getInterpolatedPositionOnSlice(self, pTIndex: int, pZSlice: float, xPos: float, yPos: float) → Vector3¶ Gets the interpolated position of a point on a given slice.
Note
The X and Y positions can be outside the channel.
Parameters: - pTIndex (int) – the T index (an uint32_t)
- pZSlice (float) – the Z slice index (a double)
- xPos (float) – the X voxel position (a double)
- yPos (float) – the Y voxel position (a double)
Returns: output (ORSModel.ors.Vector3) – a vector (a Vector3)
-
getInterpolatedValuesAtPositions(self, aWorldCoordinate: ORSModel.ors.ArrayDouble, tIndex: int, nInterpolationMethod: int, bConvertToPhysicalUnits: bool, values: ORSModel.ors.ArrayDouble) → ArrayDouble¶ Parameters: - aWorldCoordinate (ORSModel.ors.ArrayDouble) –
- tIndex (int) –
- nInterpolationMethod (int) –
- bConvertToPhysicalUnits (bool) –
- values (ORSModel.ors.ArrayDouble) –
Returns: output (ORSModel.ors.ArrayDouble) –
-
getIsClipped(timestep=0, display=None)¶ Gets to know if the clip box of the channel is active
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: isClipped (bool) – if True, the clip box of the channel is visible; False otherwise.
-
getIsData3D(self) → bool¶ Verifies if the channel holds 3D data or not.
Note
Normally channels hold 3D data, but there are cases where it is known that the data is not 3D (for example, stacks of screenshots). In those cases channels need to be told that they do not hold 3D data.
Returns: output (bool) – true if data is 3D, false otherwise
-
getIsDataInitialized(self) → bool¶ Checks if the internal data is initialized.
Note
The channel must be initialized before you start using the channel.
Returns: output (bool) – true if initialized correctly, false otherwise
-
getIsLossy(self) → bool¶ Verifies if the channel is lossy or not.
Note
A channel can be lossy for two different reasons:
Returns: output (bool) – true if data is lossy, false otherwise
-
getIsMarkedSlice(self, pTIndex: int, pZSlice: int) → bool¶ Checks to see if a slice is marked or not.
Parameters: - pTIndex (int) – the T index (an uint32_t)
- pZSlice (int) – the Z slice index (an uint32_t)
Returns: output (bool) – true if the slice’s marker is on, false otherwise
-
getIsZSliceDataAvailable(self, pTIndex: int, pZSlice: int) → bool¶ Gets the availability of a Z slice’s data.
Note
The channel can be set to work in “lazy” mode, where slices are made available as they are read.
Note
If you want to know if the entire data has arrived, use getAreAllZSlicesDataAvailable().
Parameters: - pTIndex (int) – the T index (an uint32_t)
- pZSlice (int) – the Z slice index (an uint32_t)
Returns: output (bool) – true if the Z slice’s data is available, false otherwise
-
getLabelization(self, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, iTIndex: int, min: float, max: float, considerDiagonal: bool, IProgress: ORSModel.ors.Progress, pInVolumeROI: ORSModel.ors.ROI, pOutData: ORSModel.ors.MultiROI) → MultiROI¶ Labels the channel data.
Note
This method labels areas of the channel by finding adjacent voxels and labelling them with sequential numbering.
Note
If a multi ROI object is supplied as the last argument, the results are written to it, otherwise a new one is created.
Parameters: - minX (int) – the minimum X range (an uint32_t)
- minY (int) – the minimum Y range (an uint32_t)
- minZ (int) – the minimum Z range (an uint32_t)
- maxX (int) – the maximum X range (an uint32_t)
- maxY (int) – the maximum Y range (an uint32_t)
- maxZ (int) – the maximum Z range (an uint32_t)
- iTIndex (int) – the T index (an uint32_t)
- min (float) – the minimum data range (a double)
- max (float) – the maximum data range (a double)
- considerDiagonal (bool) – true to consider diagonals, false otherwise
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress), or NULL for no progress
- pInVolumeROI (ORSModel.ors.ROI) – an optional input mask (an ROI)
- pOutData (ORSModel.ors.MultiROI) – an optional output object (an MultiROI)
Returns: output (ORSModel.ors.MultiROI) – the resulting object (an MultiROI)
-
getLineBoundedDoublePlane(self, pT: int, iZSlice: int, iYLine: int) → Rectangle¶ Parameters: - pT (int) –
- iZSlice (int) –
- iYLine (int) –
Returns: output (ORSModel.ors.Rectangle) –
-
getMarkedSlicesCount(self) → int¶ Gets the count of marked slices.
Note
Gets the total marked slices count, across all T dimensions.
Returns: output (int) – the count of marked slices (a uint32_t)
-
getMaximumValue(self) → float¶ Gets the maximum value found in the data array, always returned as a double.
Note
Min, max and mean are kept statically and are recomputed when the channel data changes.
Returns: output (float) – the maximum value (a double)
-
getMeanValue(self) → float¶ Gets the mean value computed with the data array, always returned as a double.
Note
Min, Max and Mean are kept statically and are recomputed when the channel data changes.
Returns: output (float) – the mean value (a double)
-
getMinMaxSubsetAsVector(self, xmin: int, ymin: int, zmin: int, tmin: int, xmax: int, ymax: int, zmax: int, tmax: int) → Vector3¶ Parameters: - xmin (int) –
- ymin (int) –
- zmin (int) –
- tmin (int) –
- xmax (int) –
- ymax (int) –
- zmax (int) –
- tmax (int) –
Returns: output (ORSModel.ors.Vector3) –
-
getMinimumValue(self) → float¶ Gets the minimum value found in the channel, always returned as a double.
Note
Min, max and mean are kept statically and are recomputed when the channel data changes.
Returns: output (float) – the minimum value (a double)
-
getNDArray(timestep=0)¶
-
getNormalizedMaxPossibleValue(self) → float¶ Gets the normalized maximum possible value, according to the channel’s data type.
Returns: output (float) – max value (a double)
-
getNormalizedMinPossibleValue(self) → float¶ Gets the normalized minimum possible value, according to the channel’s data type.
Returns: output (float) – min value (a double)
-
getNormalizedValueAt(self, x: int, y: int, z: int, t: int) → float¶ Gets the normalized data value at the specified coordinate.
Note
For an 8 bit channel, return value is normalized on 256.
Note
For a 16 bit channel, return value is normalized on 65536.
Note
For a 32 bit channel, return value is normalized on the spread found in the channel.
Parameters: - x (int) – X coordinate (an uint32_t)
- y (int) – Y coordinate (an uint32_t)
- z (int) – Z coordinate (an uint32_t)
- t (int) – T coordinate (an uint32_t)
Returns: output (float) – value (a double)
-
getNumberOfSuggestedWindowLevelValues(self) → int¶ Returns the number of known pairs of suggested window width and center values (for leveling).
Returns: output (int) – the number of pairs (a uint16_t)
-
getOffset(self) → float¶ Gets the channel offset.
Returns: output (float) – the offset (a double)
-
getOrientationComparisonPrecision(self) → float¶ Gets the channel’s orientation comparison precision.
Note
To deem if a channel is well behaved or not in terms of its orientations, one can compare all the channel slices’ orientations. This method returns the precision to use to determine if orientations are close enough.
Returns: output (float) – a double (see note)
-
getOtsu(timestep=0, bins=256)¶ Get the Otsu Threshold
Parameters: - timestep (int) – timestep to analyse
- bins (int) – bin count for the calculation
-
getPhysicalMax(self) → float¶ Gets the maximum value found in the data array, always returned as a double.
Note
Min and max are kept statically and are recomputed when the channel data changes.
Note
The return value is not normalized, but it is always typecast to a double.
Returns: output (float) – the maximum value (a float)
-
getPhysicalMin(self) → float¶ Gets the minimum value found in the data array, always returned as a float.
Note
Min and max are kept statically and are recomputed when the channel data changes.
Note
The return value is not normalized, but it is always typecast to a float.
Returns: output (float) – the minimum value (a float)
-
getPositionOnLine(self, pT: int, iZSlice: int, iYLine: int, xIndex: float) → Vector3¶ Parameters: - pT (int) –
- iZSlice (int) –
- iYLine (int) –
- xIndex (float) –
Returns: output (ORSModel.ors.Vector3) –
-
getPositionOnSlice(self, pTIndex: int, pZSlice: int, xPos: int, yPos: int) → Vector3¶ Gets the position of a point on a given slice.
Note
The X and Y positions can be outside the channel.
Parameters: - pTIndex (int) – the T index (an uint32_t)
- pZSlice (int) – the Z slice index (an uint32_t)
- xPos (int) – the X voxel position (an uint32_t)
- yPos (int) – the Y voxel position (an uint32_t)
Returns: output (ORSModel.ors.Vector3) – a position (an Vector3)
-
getRawDataChunk(self, iLevel1: int, iLevel2: int) → None¶ Gets a portion of the channel’s data.
Note
The received array is not a copy, do not release it. It will be released by the interface.
Note
Use with caution, as this method gives you direct access to the channel data. ORS encourages use of the CxvChannelData class wrapper instead of direct access.
Parameters: - iLevel1 (int) – the T index (an uint32_t)
- iLevel2 (int) – the Z index (an uint32_t)
-
getSampledLine(self, pPoint1: ORSModel.ors.Vector3, pPoint2: ORSModel.ors.Vector3, timeStep: int) → ArrayDouble¶ Samples the channel data between two points.
Note
This method finds all the voxel data placed on an imaginary line drawn between the two given points, and returns the data in a normalized fashion.
Parameters: - pPoint1 (ORSModel.ors.Vector3) – a starting coordinate (an ORSVector3Ptr)
- pPoint2 (ORSModel.ors.Vector3) – an ending coordinate (an ORSVector3Ptr)
- timeStep (int) – the T index (an uint32_t)
Returns: output (ORSModel.ors.ArrayDouble) – an array of double values (an ArrayDouble)
-
getSampledLineOfNPoints(self, pPoint1: ORSModel.ors.Vector3, pPoint2: ORSModel.ors.Vector3, timeStep: int, nbOutputPoint: int, bNormalize: bool, bConvertToPhysicalUnits: bool) → ArrayDouble¶ Samples the channel data between two points.
Note
This method finds all the voxel data placed on an imaginary line drawn between the two given points.
Parameters: - pPoint1 (ORSModel.ors.Vector3) – a starting coordinate (an ORSVector3Ptr)
- pPoint2 (ORSModel.ors.Vector3) – an ending coordinate (an ORSVector3Ptr)
- timeStep (int) – the timestep (an uint32_t)
- nbOutputPoint (int) – the number of points required (a uint32_t)
- bNormalize (bool) – true normalizes the results, false doesn’t
- bConvertToPhysicalUnits (bool) – true returns the values in physical units, false doesn’t
Returns: output (ORSModel.ors.ArrayDouble) – an array containing the results (an ArrayDouble)
-
getSavePixelDataWhileSavingNode(self) → int¶ Gets if and how the channel should save its pixel data to XML.
Note
The save mode has these meanings:
Returns: output (int) – the current save mode (a short between 0 and 2, see below)
-
getSerieHasBeenModified(self) → bool¶ Returns: output (bool) –
-
getSliceDirection0Size(self, timeStep: int, sliceIndex: int) → float¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
Returns: output (float) –
-
getSliceDirection0Spacing(self, timeStep: int, sliceIndex: int) → float¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
Returns: output (float) –
-
getSliceDirection1Size(self, timeStep: int, sliceIndex: int) → float¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
Returns: output (float) –
-
getSliceDirection1Spacing(self, timeStep: int, sliceIndex: int) → float¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
Returns: output (float) –
-
getSliceIntersectionLength(self, timeStep: int, sliceIndex: int) → float¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
Returns: output (float) –
-
getSliceOrientation(self, pTIndex: int, pZSlice: int, index: int) → float¶ Gets the orientation of a given slice.
Note
First three indicies indicate X orientation, next three indicate Y orientation and last three are for Z.
Parameters: - pTIndex (int) – the T index (an uint32_t)
- pZSlice (int) – the Z slice index (an uint32_t)
- index (int) – an index (from 0 to 9)
Returns: output (float) – the orientation value (a double)
-
getSlicePosition(self, pTIndex: int, pZSlice: int) → Vector3¶ Gets the position of a given slice.
Parameters: - pTIndex (int) – the T index (an uint32_t)
- pZSlice (int) – the Z slice index (an uint32_t)
Returns: output (ORSModel.ors.Vector3) – the position (an Vector3)
-
getSliceRectangle(self, timeStep: int, sliceIndex: int) → Rectangle¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
Returns: output (ORSModel.ors.Rectangle) –
-
getSlope(self) → float¶ Gets the channel slope.
Returns: output (float) – the slope (a double)
-
getSpacingXValidity(self) → bool¶ Checks if X spacing is valid.
Returns: output (bool) – true if X spacing is valid, false otherwise
-
getSpacingYValidity(self) → bool¶ Checks if Y spacing is valid.
Returns: output (bool) – true if Y spacing is valid, false otherwise
-
getSpacingZValidity(self) → bool¶ Checks if Z spacing is valid.
Returns: output (bool) – true if Z spacing is valid, false otherwise
-
getSuggestedWindowLevelCenterAt(self, pIndex: int) → float¶ Gets the Nth suggested window venter value (for leveling).
Note
The suggested leveling values are only used to present suitable values to end users.
Parameters: pIndex (int) – the index (a uint16_t) Returns: output (float) – the window center (a double)
-
getSuggestedWindowLevelWidthAt(self, pIndex: int) → float¶ Gets the Nth suggested window width value (for leveling).
Note
The suggested leveling values are only used to present suitable values to end users.
Parameters: pIndex (int) – the index (a uint32_t) Returns: output (float) – the window width (a double)
-
getTRawDataChunk(self, iLevel1: int) → int¶ Gets a T portion of the channel’s data.
Note
The received array is not a copy, do not release it. It will be released by the interface.
Note
Use with caution, as this method gives you direct access to the channel data. ORS encourages use of the CxvChannelData class wrapper instead of direct access.
Parameters: iLevel1 (int) – the T index (an uint32_t) Returns: output (int) – an array of array of bytes (char)
-
getTimeFrame(self, pTimeStep: int, pYear: int, pMonth: int, pDay: int, pHour: int, pMinutes: int, pSeconds: int, pMicroSeconds: int) → None¶ Gets the value of a time frame.
Note
Time frames represent the exact time at each T increment.
Note
-1 is returned if no time frames are defined or if the T index argument is invalid.
Parameters: pTimeStep (int) – the T index (an uint32_t)
Returns: - pYear (int) – the year (a uint16_t*)
- pMonth (int) – the month (a uint16_t*)
- pDay (int) – the day (a uint16_t*)
- pHour (int) – the hour (a uint16_t*)
- pMinutes (int) – the minutes (a uint16_t*)
- pSeconds (int) – the seconds (a uint16_t*)
- pMicroSeconds (int) – the microseconds (a uint32_t*)
-
getTotalByteCount(self) → int¶ Gets the total number of bytes in the internal data.
Note
The size in bytes is represented by the formula: X size * Y size * Z size * T size * bit depth.
Returns: output (int) – number of bytes (a int64_t)
-
getTotalSliceIntersectionLength(self, timeStep: int) → float¶ Parameters: timeStep (int) – Returns: output (float) –
-
getTransformationToGoTo(self, pInChannel: ORSModel.ors.Channel) → Matrix4x4¶ Parameters: pInChannel (ORSModel.ors.Channel) – Returns: output (ORSModel.ors.Matrix4x4) –
-
getTypeDescription(self) → str¶ Returns: output (str) –
-
getValueAsDoubleAtIndex(self, xIndex: int, yIndex: int, zIndex: int, tIndex: int) → float¶ Parameters: - xIndex (int) –
- yIndex (int) –
- zIndex (int) –
- tIndex (int) –
Returns: output (float) –
-
getValueAsDoubleAtWorldCoordinateNearest(self, aWorldCoordinate: ORSModel.ors.Vector3, tIndex: int) → float¶ Parameters: - aWorldCoordinate (ORSModel.ors.Vector3) –
- tIndex (int) –
Returns: output (float) –
-
getValueConvertedFromPhysicalUnits(self, pInput: float) → float¶ Converts a value from physical units to channel units.
Note
Slope and offset are applied to convert from physical units.
Parameters: pInput (float) – the value to convert (a double) Returns: output (float) – the result (a double)
-
getValueConvertedToPhysicalUnits(self, pInput: float) → float¶ Converts a value from channel units to physical units.
Note
Slope and offset are applied to convert to physical units.
Parameters: pInput (float) – the value to convert (a double) Returns: output (float) – the result (a double)
-
hasDICOMAttribute(self, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, bSearchSubs: bool) → bool¶ Verifies the existence of a DICOM attribute.
Parameters: - iTIndex (int) – the T index (an uint32_t)
- iZIndex (int) – the slice index (an uint32_t)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- bSearchSubs (bool) – true to search sequences, false otherwise
Returns: output (bool) – true if item was found, false otherwise
-
classmethod
imread(files)¶ Loads a Channel from files
Parameters: files (file) [count=[0, None]] – fully qualified file name list Returns: outChannel (ORSModel.ors.Channel) – the resulting Channel
-
classmethod
imreadDICOM(files)¶ Loads a Channel from files or folder contaning DICOM
Parameters: files (file) [count=[0, None]] – fully qualified file name list Returns: outChannel (ORSModel.ors.Channel) – the resulting Channel
-
classmethod
imreadDICOMFolder(folder)¶ Loads a Channel from folder of DICOM files
Parameters: folder (folder) – fully qualified folder Returns: outChannel (ORSModel.ors.Channel) – the resulting Channel
-
classmethod
imreadFolder(folder)¶ Loads a Channel from folder
Parameters: folder (folder) – fully qualified folder Returns: outChannel (ORSModel.ors.Channel) – the resulting Channel
-
imsave(fileName, extension='tif')¶ Save a Channel to file in the type specified by the extension
Parameters: - fileName (file saving) – fully qualified file name
- extension (str) – image file format extension
Return: True or False
Rtype: bool
-
imwrite(fileName, extension='tif')¶ Save a Channel to file in the type specified by the extension
Parameters: - fileName (file saving) – fully qualified file name
- extension (str) – image file format extension
Return: True or False
Rtype: bool
-
initializeData(self) → bool¶ Initializes the channel’s internal data.
Note
The memory required by the internal data is represented by the formula: X size * Y size * Z size * T size * bitSize.
Note
The channel must be initialized before you start using the channel.
Note
The XYZT sizes, and the data type must be set prior to initializing the channel.
Note
A false result means that a memory allocation error occurred.
Returns: output (bool) – true if initialization was successful, false otherwise
-
initializeDataForFLOAT(self) → bool¶ Initializes the channel data array for 32 bit float data.
Note
The size in bytes of the data array is represented by the formula: X * Y * Z * T * 4.
Note
The channel must be initialized before you set the channel data array.
Note
The XYZT sizes must be set prior to initializing the channel.
Note
A false result means that a memory allocation error occurred.
Returns: output (bool) – true if initialization was successful, false otherwise
-
initializeDataForUCHAR(self) → bool¶ Initializes the channel data array for 8 bit unsigned data.
Note
The size in bytes of the data array is represented by the formula: X * Y * Z * T.
Note
The channel must be initialized before you set the channel data array.
Note
The XYZT sizes must be set prior to initializing the channel.
Note
A false result means that a memory allocation error occurred.
Returns: output (bool) – true if initialization was successful, false otherwise
-
initializeDataForUINT(self) → bool¶ Initializes the channel data array for 32 bit unsigned int data.
Note
The size in bytes of the data array is represented by the formula: X * Y * Z * T * 4.
Note
The channel must be initialized before you set the channel data array.
Note
The XYZT sizes must be set prior to initializing the channel.
Note
A false result means that a memory allocation error occurred.
Returns: output (bool) – true if initialization was successful, false otherwise
-
initializeDataForUSHORT(self) → bool¶ Initializes the channel data array for 16 bit unsigned integer data.
Note
The size in bytes of the data array is represented by the formula: X * Y * Z * T * 2.
Note
The channel must be initialized before you set the channel data array.
Note
The XYZT sizes must be set prior to initializing the channel.
Note
A false result means that a memory allocation error occurred.
Returns: output (bool) – true if initialization was successful, false otherwise
-
invert(self, invertX: bool, invertY: bool, invertZ: bool, invertData: bool, axisTransformation: int, IProgress: ORSModel.ors.Progress, IOutputChannel: ORSModel.ors.Channel) → Channel¶ Inverts the receiver.
Note
The axis transformation code allows to transpose the axis according to this grid: 0 -> XYZ (no transformation) 1 -> XZY 2 -> YXZ 3 -> YZX 4 -> ZXY 5 -> ZYX
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created.
Parameters: - invertX (bool) – true to invert the X axis
- invertY (bool) – true to invert the Y axis
- invertZ (bool) – true to invert the Z axis
- invertData (bool) – true to invert the data
- axisTransformation (int) – an axis transformation code (a uint16_t), between 0 and 5 (see note)
- IProgress (ORSModel.ors.Progress) – a progress object, NULL for no progress (an Progress)
- IOutputChannel (ORSModel.ors.Channel) – an optional output channel (a Channel)
Returns: output (ORSModel.ors.Channel) – the inverted channel (a Channel)
-
iterateDICOMAttributes(self, iTIndex: int, iZIndex: int, callbackFunction: int, userdata: int) → None¶ Iterates through the DICOM attributes, calling a callback function.
Note
The callback function is called with the group and element numbers, the attribute as a string, and any user data supplied to this method. Note that PixelData and OverlayData attributes are excluded from the enumeration. The callback function should return true to continue iterating, but can return false to interrupt the iterating.
Parameters: - iTIndex (int) – the T index (an uint32_t)
- iZIndex (int) – the slice index (an uint32_t)
- callbackFunction (int) – a callback function (the address of a ORSCHANNELDICOMATTRIBUTESITERATOR function)
- userdata (bytes) – any user data to be supplied to the callback function
-
mergeWithBAndProjectInC(self, channelB: ORSModel.ors.Channel, channelC: ORSModel.ors.Channel, IProgress: ORSModel.ors.Progress) → None¶ Merges the channel with another channel, feeding a third channel.
Note
Merging respects both channels’ orientation, size, spacing, etc.
Parameters: - channelB (ORSModel.ors.Channel) – a source channel (a Channel)
- channelC (ORSModel.ors.Channel) – a target channel (a Channel)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
-
moveChannelDataInto(self, otherChannel: ORSModel.ors.Channel) → bool¶ move the data from the left channel to the right channel
Parameters: otherChannel (ORSModel.ors.Channel) – the other channel to move data into Returns: output (bool) –
-
moveSlicedata(self, zIndex: int, timeStep: int, xTranslation: int, yTranslation: int) → None¶ Parameters: - zIndex (int) –
- timeStep (int) –
- xTranslation (int) –
- yTranslation (int) –
-
none()¶ Channel.__init__() -> Channel
-
ones(aShape, dtype=<class 'numpy.uint8'>)¶
-
overwriteRangeWithValue(self, minValue: float, maxValue: float, replacementValue: float) → None¶ Overwrites data within a range with a given value.
Note
All three arguments are supplied in double for convenience only, and are converted into the native type of the channel. For each pixel of the channel, if its value is > minimum range and < maximum range, then its pixel is replaced with the replacement value.
Parameters: - minValue (float) – the minimum range value (a double, see note below), non-inclusive
- maxValue (float) – the maximum range value (a double, see note below), non-inclusive
- replacementValue (float) – the replacement value (a double, see note below)
-
overwriteValueAtIndicies(self, indices: int, indicesSize: int, repValue: float) → None¶ Overwrites the channel data at the specified indicies with a supplied (normalized) value.
Note
The replacement value must be supplied in double format, no matter the data type of the channel.
Note
The sender is responsible for releasing the array of indices.
Parameters: - indices (int) – an array of data indicies (an array of int64_t)
- indicesSize (int) – the array element count (an uint32_t)
- repValue (float) – the replacement value (a double)
-
overwriteValueAtWorldCoordinates(self, positionTriplets: float, nbTriplet: int, tIndex: int, replacementValue: float) → None¶ Overwrites the values at positions specified by world triplets and time T.
Note
The replacement value must be supplied in normalized format, no matter the data type of the channel.
Parameters: - positionTriplets (float) – An array of world coordinates triplets (a double*)
- nbTriplet (int) – The number of triplets in the above array (an uint32_t)
- tIndex (int) – The T index to be processed (an uint32_t)
- replacementValue (float) – The replacement value (a double)
-
overwriteValueWithMultiROI(self, aMultiROI: ORSModel.ors.MultiROI, labelOffset: int) → None¶ Overwrites the channel data at a givenMultiROI.
Note
The channel and multiROI doesn’t need to have the same shape
Note
This method overwrites the channel data according to a MultiROI.
Note
The new value needs to be a normalized value, and will be converted to the native channel type.
Parameters: - aMultiROI (ORSModel.ors.MultiROI) – a MultiROI (an MultiROI)
- labelOffset (int) – the label offset (an uint32_t)
-
overwriteValueWithMultiROIConsideringOpacity(self, aMultiROI: ORSModel.ors.MultiROI, labelOffset: int, fHightlightOpacity: float, fHightlightOpacityOutRange: float, fROIOpacity: float, fROIOpacityOutRange: float) → None¶ Overwrites the channel data at a givenMultiROI.
Note
The channel and multiROI doesn’t need to have the same shape
Note
This method overwrites the channel data according to a MultiROI.
Note
The new value needs to be a normalized value, and will be converted to the native channel type.
Parameters: - aMultiROI (ORSModel.ors.MultiROI) – a MultiROI (an MultiROI)
- labelOffset (int) – the label offset (an uint32_t)
- fHightlightOpacity (float) –
- fHightlightOpacityOutRange (float) –
- fROIOpacity (float) –
- fROIOpacityOutRange (float) –
-
overwriteValueWithMultiROIOnSubBox(self, aVolumeROI: ORSModel.ors.MultiROI, labelOffset: int, subBox: ORSModel.ors.Box, iTIndex: int) → None¶ Overwrites the channel data at a givenMultiROI included in the given box.
Note
The channel and multiROI doesn’t need to have the same shape
Note
The box must have orthonormal base with the channel box.
Note
This method overwrites the channel data according to a MultiROI.
Note
The new value needs to be a normalized value, and will be converted to the native channel type.
Parameters: - aVolumeROI (ORSModel.ors.MultiROI) – a MultiROI (an MultiROI)
- labelOffset (int) – the label offset (an uint32_t)
- subBox (ORSModel.ors.Box) – the box (a Box)
- iTIndex (int) – the time step index (uint32_t)
-
overwriteValueWithMultiROIOnSubBoxConsideringOpacity(self, aVolumeROI: ORSModel.ors.MultiROI, labelOffset: int, subBox: ORSModel.ors.Box, fHightlightOpacity: float, fHightlightOpacityOutRange: float, fROIOpacity: float, fROIOpacityOutRange: float, iTIndex: int) → None¶ Overwrites the channel data at a givenMultiROI included in the given box.
Note
The channel and multiROI doesn’t need to have the same shape
Note
The box must have orthonormal base with the channel box.
Note
This method overwrites the channel data according to a MultiROI.
Note
The new value needs to be a normalized value, and will be converted to the native channel type.
Parameters: - aVolumeROI (ORSModel.ors.MultiROI) – a MultiROI (an MultiROI)
- labelOffset (int) – the label offset (an uint32_t)
- subBox (ORSModel.ors.Box) – the box (a Box)
- fHightlightOpacity (float) – the time step index (uint32_t)
- fHightlightOpacityOutRange (float) –
- fROIOpacity (float) –
- fROIOpacityOutRange (float) –
- iTIndex (int) –
-
overwriteValueWithROI(self, aVolumeROI: ORSModel.ors.ROI, pReplacementValue: float) → None¶ Overwrites the channel data at a given Region of Interest.
Note
The channel and ROI doesn’t need to have the same shape
Note
This method overwrites the channel data according to a Region of Interest.
Note
The new value needs to be a normalized value, and will be converted to the native channel type.
Parameters: - aVolumeROI (ORSModel.ors.ROI) – a ROI (an ROI)
- pReplacementValue (float) – the new value (a double)
-
overwriteValueWithROIOnSubBox(self, aROI: ORSModel.ors.ROI, pReplacementValue: float, subBox: ORSModel.ors.Box, iTIndex: int) → None¶ Overwrites the channel data at a given Region of Interest included in the given box.
Note
The channel and ROI doesn’t need to have the same shape
Note
The box must have orthonormal base with the channel box.
Note
This method overwrites the channel data according to a Region of Interest.
Note
The new value needs to be a normalized value, and will be converted to the native channel type.
Parameters: - aROI (ORSModel.ors.ROI) – a ROI (an ROI)
- pReplacementValue (float) – the new value (a double)
- subBox (ORSModel.ors.Box) – the box (a Box)
- iTIndex (int) – the time step index (uint32_t)
-
prepareForObliqueExtractionFromRectangleBetweenPlanes(self, aBoundedPlane: ORSModel.ors.Rectangle, startPlane: ORSModel.ors.Plane, endPlane: ORSModel.ors.Plane, xSize: int, ySize: int, nbZSlice: int, fitOnData: bool, uniformSpacing: bool, bOptimalSizeAndSpacingInXY: bool, bOptimalSizeAndSpacingInZ: bool, IOutChannel: ORSModel.ors.Channel) → Channel¶ Parameters: - aBoundedPlane (ORSModel.ors.Rectangle) –
- startPlane (ORSModel.ors.Plane) –
- endPlane (ORSModel.ors.Plane) –
- xSize (int) –
- ySize (int) –
- nbZSlice (int) –
- fitOnData (bool) –
- uniformSpacing (bool) –
- bOptimalSizeAndSpacingInXY (bool) –
- bOptimalSizeAndSpacingInZ (bool) –
- IOutChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) –
-
removeAllPrivateDICOMAttributes(self) → None¶ Removes all private DICOM attributes.
-
removeSlice(self, pSliceIndex: int) → None¶ Removes a slice of data from the channel.
Note
Note that the same slice index will be removed in all T dimensions of the channel.
Parameters: pSliceIndex (int) – the slice number (an uint32_t, 0 based)
-
resize(shape, dtype=<class 'numpy.uint8'>)¶
-
setAllData(self, aValue: float) → None¶ Sets the entire channel data to a single value.
Note
The new value needs to be a normalized value, and will be converted to the native channel type.
Parameters: aValue (float) – the new value (a double)
-
setAllDataOnSubBox(self, aValue: float, subBox: ORSModel.ors.Box, iTIndex: int) → None¶ Sets the channel data included in a box to a single value.
Note
The box must have orthonormal base with the channel box.
Note
The new value needs to be a normalized value, and will be converted to the native channel type.
Parameters: - aValue (float) – the new value (a double)
- subBox (ORSModel.ors.Box) – the subBox (a Box)
- iTIndex (int) – the T index (an uint32_t)
-
setAllMarkedSlices(self, pValue: bool) → None¶ Sets the boolean marker of all slices.
Note
Each slice has a BOOLEAN marker associated to it.
Parameters: pValue (bool) – true to set the entire slices’ marker on, false otherwise
-
setAreAllZSlicesDataAvailable(self, pValue: bool) → None¶ Sets the availability of all Z slices’ data.
Note
The channel can be set to work in “lazy” mode, where slices are made available as they are read.
Parameters: pValue (bool) – true to set the entire Z slices’ data as available, false otherwise
-
setDICOMAttribute(self, sValue: str, iTIndex: int, iZIndex: int, pGroup: int, pElement: int, bReplaceExisting: bool) → bool¶ Sets a string DICOM attribute.
Note
To apply to all slices, set the T and Z index to -1. The T and Z values’ true type is uint32_t.
Note
Applicable to the following VRs: AE, AS, AT, CS, DA, DS, DT, FL, FD, IS, LO, LT, OB, OF, OW, PN, SH, SL, SS, ST, TM, UI, UL, US, UT.
Parameters: - sValue (str) – the string value (a string)
- iTIndex (int) – the T index (an int64_t, see note)
- iZIndex (int) – the slice index (an int64_t, see note)
- pGroup (int) – the group number (a uint16_t)
- pElement (int) – the element number (a uint16_t)
- bReplaceExisting (bool) – true to replace an existing value, false otherwise
Returns: output (bool) – true if successful, false otherwise
-
setDICOMAttributeDouble(self, iValue: float, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bReplaceExisting: bool) → bool¶ Sets a double DICOM attribute.
Note
Applicable to the following VRs: DS, FD.
Note
To apply to all slices, set the T and Z index to -1. The T and Z values’ true type is uint32_t.
Parameters: - iValue (float) – the value (a double)
- iTIndex (int) – the T index (an int64_t, see note)
- iZIndex (int) – the slice index (an int64_t, see note)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bReplaceExisting (bool) – true to replace an existing value, false otherwise
Returns: output (bool) – true if successful, false otherwise
-
setDICOMAttributeFloat(self, iValue: float, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bReplaceExisting: bool) → bool¶ Sets a float DICOM attribute.
Note
Applicable to the following VRs: FL, OF.
Note
To apply to all slices, set the T and Z index to -1. The T and Z values’ true type is uint16_t.
Parameters: - iValue (float) – the value (a float)
- iTIndex (int) – the T index (an int64_t, see note)
- iZIndex (int) – the slice index (an int64_t, see note)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bReplaceExisting (bool) – true to replace an existing value, false otherwise
Returns: output (bool) – true if successful, false otherwise
-
setDICOMAttributeInt(self, iValue: int, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bReplaceExisting: bool) → bool¶ Sets a signed 32 bit DICOM attribute.
Note
Applicable to the following VRs: IS, SL, SS, UL, US.
Note
To apply to all slices, set the T and Z index to -1. The T and Z values’ true type is uint32_t.
Parameters: - iValue (int) – the value (an int)
- iTIndex (int) – the T index (an int64_t, see note)
- iZIndex (int) – the slice index (an int64_t, see note)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bReplaceExisting (bool) – true to replace an existing value, false otherwise
Returns: output (bool) – true if successful, false otherwise
-
setDICOMAttributeShort(self, iValue: int, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bReplaceExisting: bool) → bool¶ Sets a signed 16 bit DICOM attribute.
Note
Applicable to the following VRs: SS.
Note
To apply to all slices, set the T and Z index to -1. The T and Z values’ true type is uint32_t.
Parameters: - iValue (int) – the value (a short)
- iTIndex (int) – the T index (an int64_t, see note)
- iZIndex (int) – the slice index (an int64_t, see note)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bReplaceExisting (bool) – true to replace an existing value, false otherwise
Returns: output (bool) – true if successful, false otherwise
-
setDICOMAttributeUnsignedChar(self, iValue: int, iTIndex: int, iZIndex: int, pGroup: int, pElement: int, iIndex: int, bReplaceExisting: bool) → bool¶ Sets an unsigned 8 bit DICOM attribute.
Note
Applicable to the following VRs: OB.
Note
To apply to all slices, set the T and Z index to -1. The T and Z values’ true type is uint32_t.
Parameters: - iValue (int) – the value (an short char)
- iTIndex (int) – the T index (an int64_t, see note)
- iZIndex (int) – the slice index (an int64_t, see note)
- pGroup (int) – the group number (a uint16_t)
- pElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bReplaceExisting (bool) – true to replace an existing value, false otherwise
Returns: output (bool) – true if successful, false otherwise
-
setDICOMAttributeUnsignedInt(self, iValue: int, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bReplaceExisting: bool) → bool¶ Sets an unsigned 32 bit DICOM attribute.
Note
Applicable to the following VRs: UL.
Note
To apply to all slices, set the T and Z index to -1. The T and Z values’ true type is uint32_t.
Parameters: - iValue (int) – the value (a uint32_t)
- iTIndex (int) – the T index (an int64_t, see note)
- iZIndex (int) – the slice index (an int64_t, see note)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bReplaceExisting (bool) – true to replace an existing value, false otherwise
Returns: output (bool) – true if successful, false otherwise
-
setDICOMAttributeUnsignedShort(self, iValue: int, iTIndex: int, iZIndex: int, iGroup: int, iElement: int, iIndex: int, bReplaceExisting: bool) → bool¶ Sets an unsigned 16 bit DICOM attribute.
Note
Applicable to the following VRs: OW, US.
Note
To apply to all slices, set the T and Z index to -1. The T and Z values’ true type is uint32_t.
Parameters: - iValue (int) – the value (a uint16_t)
- iTIndex (int) – the T index (an int64_t, see note)
- iZIndex (int) – the slice index (an int64_t, see note)
- iGroup (int) – the group number (a uint16_t)
- iElement (int) – the element number (a uint16_t)
- iIndex (int) – index of the item in case of multi-valued elements (0..vm-1)
- bReplaceExisting (bool) – true to replace an existing value, false otherwise
Returns: output (bool) – true if successful, false otherwise
-
setDICOMContainer(self, iTIndex: int, iZIndex: int, sData: int) → None¶ Private.
Parameters: - iTIndex (int) –
- iZIndex (int) –
- sData (bytes) –
-
setDataDescription(self, pChannelDescriptionEnumValue: int) → None¶ Sets the channel description.
Note
Channel description is used to categorize channels.
Note
See the constants defined in ORS_def.h, enum CxvChannel_Description, for valid values.
Parameters: pChannelDescriptionEnumValue (int) – a description index (a int32_t*)
-
setDataRange(self, pValue: float) → None¶ Sets the size of the spread of data.
Note
Normally the channel knows its data spread, for example the spread of an 8 bit channel is 256 (from 0 to 255). This method becomes useful when it is known that the pixel data is smaller that the data type. For example, it is common for DICOM data to have its pixel data represented in 12 bits, but the data is stored in 16 bits.
Parameters: pValue (float) – a value (a double)
-
setDataType(self, pDataType: int) → None¶ Sets the channel data type.
Note
See CxvChannel_Data_Type (in ORS_def.h) for supported data types.
Parameters: pDataType (int) –
-
setDataUnit(self, bDimensionalUnit: str) → None¶ Sets the channel data unit description.
Parameters: bDimensionalUnit (str) – a string
-
setInitialWindowLevelValues(self, pWidth: float, pCenter: float) → None¶ Sets the initial window leveling value.
Note
This leveling will only be applied when the channel is first shown in a volume.
Note
Two special values are accepted: -1 means to normalize from the channel data spread, and 0 means to use no leveling at all.
Parameters: - pWidth (float) – the window width (a double)
- pCenter (float) – the window center (a double)
-
setIsData3D(self, pValue: bool) → None¶ Sets the channel to be true 3D data or not.
Note
Normally channels hold 3D data, but there are cases where it is known that the data is not 3D (for example, stacks of screenshots). In those cases channels need to be told that they do not hold 3D data.
Parameters: pValue (bool) – true if data is 3D, false otherwise
-
setIsLossy(self, pValue: bool) → None¶ Sets the channel to be lossy or not.
Note
A channel can be lossy for two different reasons:
Parameters: pValue (bool) – true if data is lossy, false otherwise
-
setIsMarkedSlice(self, pTIndex: int, pZSlice: int, pValue: bool) → None¶ Sets a slice to be marked or not.
Note
Each slice has a BOOLEAN marker associated to it.
Parameters: - pTIndex (int) – the T index (an uint32_t)
- pZSlice (int) – the Z slice index (an uint32_t)
- pValue (bool) – true to set the slice to be marked, false otherwise
-
setIsZSliceDataAvailable(self, pTIndex: int, pZSlice: int, pValue: bool) → None¶ Sets the availability of a Z slice’s data.
Note
The channel can be set to work in “lazy” mode, where slices are made available as they are read.
Parameters: - pTIndex (int) – the T index (a uint32_t)
- pZSlice (int) – the Z slice index (a uint32_t)
- pValue (bool) – true to set the Z slice’s data available, false otherwise
-
setOffset(self, pOffset: float) → None¶ Sets the channel offset.
Parameters: pOffset (float) – the offset (a double)
-
setSavePixelDataWhileSavingNode(self, pFlag: int) → None¶ Controls if and how the channel should save its pixel data to XML.
Note
The save mode has these meanings:
Parameters: pFlag (int) – the save mode (a short between 0 and 2, see below)
-
setSerieHasBeenModified(self, seriesHasBeenChangedFlag: bool) → None¶ Parameters: seriesHasBeenChangedFlag (bool) –
-
setSliceDirection0Size(self, timeStep: int, sliceIndex: int, direction0Size: float) → None¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
- direction0Size (float) –
-
setSliceDirection0Spacing(self, timeStep: int, sliceIndex: int, direction0Spacing: float) → None¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
- direction0Spacing (float) –
-
setSliceDirection1Size(self, timeStep: int, sliceIndex: int, direction1Size: float) → None¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
- direction1Size (float) –
-
setSliceDirection1Spacing(self, timeStep: int, sliceIndex: int, direction1Spacing: float) → None¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
- direction1Spacing (float) –
-
setSliceOrientation(self, pTIndex: int, pZSlice: int, index: int, value: float) → None¶ Sets the orientation of a given slice.
Note
First three indicies indicate X orientation, next three indicate Y orientation and last three are for Z.
Parameters: - pTIndex (int) – the T index (an uint32_t)
- pZSlice (int) – the Z slice index (an uint32_t)
- index (int) – an index (from 0 to 9)
- value (float) – the orientation value (a double)
-
setSlicePosition(self, pTIndex: int, pZSlice: int, pPosition: ORSModel.ors.Vector3) → None¶ Sets the position of a given slice.
Parameters: - pTIndex (int) – the T index (an uint32_t)
- pZSlice (int) – the Z slice index (an uint32_t
- pPosition (ORSModel.ors.Vector3) – a position (an Vector3)
-
setSliceRectangle(self, timeStep: int, sliceIndex: int, pBoundedPlane: ORSModel.ors.Rectangle) → None¶ Parameters: - timeStep (int) –
- sliceIndex (int) –
- pBoundedPlane (ORSModel.ors.Rectangle) –
-
setSlope(self, pSlope: float) → None¶ Sets the channel slope.
Parameters: pSlope (float) – the slope (a double)
-
setSpacingValidity(self, bXSpacing: bool, bYSpacing: bool, bZSpacing: bool) → None¶ Sets if the channel has valid spacing.
Parameters: - bXSpacing (bool) – validity of X spacing
- bYSpacing (bool) – validity of Y spacing
- bZSpacing (bool) – validity of Z spacing
-
setSubset(self, pSourceChannel: ORSModel.ors.Channel, xMinSource: int, yMinSource: int, zMinSource: int, tMinSource: int, xSize: int, ySize: int, zSize: int, tSize: int, xMinDestination: int, yMinDestination: int, zMinDestination: int, tMinDestination: int) → None¶ Writes a channel subset into the current channel data.
Parameters: - pSourceChannel (ORSModel.ors.Channel) – the channel to read the data from (the “source”)
- xMinSource (int) – the first index in X to copy from the source channel (a uint32_t)
- yMinSource (int) – the first index in Y to copy from the source channel (a uint32_t)
- zMinSource (int) – the first index in Z to copy from the source channel (a uint32_t)
- tMinSource (int) – the first index in T to copy from the source channel (a uint32_t)
- xSize (int) – the number of pixels in X to copy from the source channel (a uint32_t)
- ySize (int) – the number of pixels in Y to copy from the source channel (a uint32_t)
- zSize (int) – the number of pixels in Z to copy from the source channel (a uint32_t)
- tSize (int) – the number of pixels in T to copy from the source channel (a uint32_t)
- xMinDestination (int) – the index in X of the first pixel to copy into the current channel (a uint32_t)
- yMinDestination (int) – the index in Y of the first pixel to copy into the current channel (a uint32_t)
- zMinDestination (int) – the index in Z of the first pixel to copy into the current channel (a uint32_t)
- tMinDestination (int) – the index in T of the first pixel to copy into the current channel (a uint32_t)
-
setTimeFrame(self, pTimeStep: int, pYear: int, pMonth: int, pDay: int, pHour: int, pMinutes: int, pSeconds: int, pMicroSeconds: int) → None¶ Sets the value of a time frame.
Note
Time frames represent the exact time at each T increment.
Parameters: - pTimeStep (int) – the T index (a uint32_t)
- pYear (int) – the year (a uint16_t)
- pMonth (int) – the month (a uint16_t)
- pDay (int) – the day (a uint16_t)
- pHour (int) – the hour (a uint16_t)
- pMinutes (int) – the minutes (a uint16_t)
- pSeconds (int) – the seconds (a uint16_t)
- pMicroSeconds (int) – the microseconds (a uint32_t)
-
shape¶
-
swapSliceData(self, iTSource: int, iZSource: int, iTTarget: int, iZTarget: int) → None¶ Swap two slices.
Note
If any index is invalid no swap occurs.
Parameters: - iTSource (int) – T source index (an uint32_t)
- iZSource (int) – Z source index (an uint32_t)
- iTTarget (int) – T target index (an uint32_t)
- iZTarget (int) – Z target index (an uint32_t)
-
transform(self, transformationMatrix: ORSModel.ors.Matrix4x4) → None¶ Parameters: transformationMatrix (ORSModel.ors.Matrix4x4) –
-
updateCrossSection(self, path: ORSModel.ors.VisualPath, aTransformationMatrix: ORSModel.ors.Matrix4x4, timeStep: int, pInChannel: ORSModel.ors.Channel) → None¶ Parameters: - path (ORSModel.ors.VisualPath) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- timeStep (int) –
- pInChannel (ORSModel.ors.Channel) –
-
updateSliceMatricesWithGlobalMatrixValue(self) → None¶
-
zeros(shape, dtype=<class 'numpy.uint8'>)¶
-
Channel2DOverlapMergerHelper¶
-
class
ORSModel.ors.Channel2DOverlapMergerHelper¶ Bases:
ORSModel.ors.Unmanaged-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getOverLap(self, outputChannel: ORSModel.ors.Channel, listOfChannelsToMerge: ORSModel.ors.List, z: int, t: int, method: int, onlyOverlap: bool) → Channel¶ Parameters: - outputChannel (ORSModel.ors.Channel) –
- listOfChannelsToMerge (ORSModel.ors.List) –
- z (int) –
- t (int) –
- method (int) –
- onlyOverlap (bool) –
Returns: output (ORSModel.ors.Channel) –
-
none()¶ Channel2DOverlapMergerHelper.__init__() -> Channel2DOverlapMergerHelper
-
updateOverlapAtPos(self, outputChannel: ORSModel.ors.Channel, listOfChannelsToMerge: ORSModel.ors.List, oldXMin: int, oldXMax: int, oldYMin: int, oldYMax: int, newXmin: int, newXMax: int, newYMin: int, newYMax: int) → None¶ Parameters: - outputChannel (ORSModel.ors.Channel) –
- listOfChannelsToMerge (ORSModel.ors.List) –
- oldXMin (int) –
- oldXMax (int) –
- oldYMin (int) –
- oldYMax (int) –
- newXmin (int) –
- newXMax (int) –
- newYMin (int) –
- newYMax (int) –
-
Channel3DBlendingHelper¶
-
class
ORSModel.ors.Channel3DBlendingHelper¶ Bases:
ORSModel.ors.Unmanaged-
blend(self, outputChannel: ORSModel.ors.Channel, listOfChannelsToMerge: ORSModel.ors.List, t: int, method: int, interpolation: int, progress: ORSModel.ors.Progress) → Channel¶ Parameters: - outputChannel (ORSModel.ors.Channel) –
- listOfChannelsToMerge (ORSModel.ors.List) –
- t (int) –
- method (int) –
- interpolation (int) –
- progress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Channel) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ Channel3DBlendingHelper.__init__() -> Channel3DBlendingHelper
-
ChannelRegistrationHelper¶
-
class
ORSModel.ors.ChannelRegistrationHelper¶ Bases:
ORSModel.ors.Unmanaged-
applyTransformationDegreeOfFreedomOnChannel(self, kindOfDegreeOfFreedom: int, numeroDirection: int, backward: bool) → None¶ Parameters: - kindOfDegreeOfFreedom (int) –
- numeroDirection (int) –
- backward (bool) –
-
getChannelA(self) → Channel¶ Returns: output (ORSModel.ors.Channel) –
-
getChannelB(self) → Channel¶ Returns: output (ORSModel.ors.Channel) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCurrentSimilarity(self) → float¶ Returns: output (float) –
-
getEpsilonRotation(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getEpsilonScaleFactor(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getEpsilonTranslation(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getFactorOfCompressionHistogramA(self) → int¶ Returns: output (int) –
-
getFactorOfCompressionHistogramB(self) → int¶ Returns: output (int) –
-
getHistogramASize(self) → int¶ Returns: output (int) –
-
getHistogramBSize(self) → int¶ Returns: output (int) –
-
getMaxSimilarityMetric(self) → float¶ Returns: output (float) –
-
getMutualInformationFor(self, p_entropyA: float, p_entropyB: float, p_entropyAB: float, histoASize: int, histoBSize: int, fractionOfChannelConsidered: float) → float¶ Parameters: - p_entropyA (float) –
- p_entropyB (float) –
- p_entropyAB (float) –
- histoASize (int) –
- histoBSize (int) –
- fractionOfChannelConsidered (float) –
Returns: output (float) –
-
getNearestInterpolation(self) → bool¶ Returns: output (bool) –
-
getRegistration3DTransformation(self, bApplyTransformation: bool, IProgress: ORSModel.ors.Progress) → Matrix4x4¶ Parameters: - bApplyTransformation (bool) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Matrix4x4) –
-
getRotationScaleCenter(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getRotationScaleCenterAlwaysAtCenter(self) → bool¶ Returns: output (bool) –
-
getSearchDeltaRotation(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getSearchDeltaScaleFactor(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getSearchDeltaTranslation(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getSuggestedHistogramSizesSturgesRule(self, pIChannelA: ORSModel.ors.Channel, pIChannelB: ORSModel.ors.Channel, pSuggestedSizeOfHistogram: int) → None¶ Parameters: - pIChannelA (ORSModel.ors.Channel) –
- pIChannelB (ORSModel.ors.Channel) –
- pSuggestedSizeOfHistogram (int) –
-
getTimeA(self) → int¶ Returns: output (int) –
-
getTimeB(self) → int¶ Returns: output (int) –
-
getUseMultiScale(self) → bool¶ Returns: output (bool) –
-
getUseMutualInfo(self) → bool¶ Returns: output (bool) –
-
getXSampling(self) → int¶ Returns: output (int) –
-
getYSampling(self) → int¶ Returns: output (int) –
-
getZSampling(self) → int¶ Returns: output (int) –
-
none()¶ ChannelRegistrationHelper.__init__() -> ChannelRegistrationHelper
-
resetRotationScaleCenter(self) → None¶
-
setChannelA(self, pIChannel: ORSModel.ors.Channel) → None¶ Parameters: pIChannel (ORSModel.ors.Channel) –
-
setChannelAB(self, pIChannelA: ORSModel.ors.Channel, pIChannelB: ORSModel.ors.Channel) → None¶ Parameters: - pIChannelA (ORSModel.ors.Channel) –
- pIChannelB (ORSModel.ors.Channel) –
-
setChannelB(self, pIChannel: ORSModel.ors.Channel) → None¶ Parameters: pIChannel (ORSModel.ors.Channel) –
-
setEpsilonRotation(self, pVector: ORSModel.ors.Vector3) → None¶ Parameters: pVector (ORSModel.ors.Vector3) –
-
setEpsilonScaleFactor(self, pVector: ORSModel.ors.Vector3) → None¶ Parameters: pVector (ORSModel.ors.Vector3) –
-
setEpsilonTranslation(self, pVector: ORSModel.ors.Vector3) → None¶ Parameters: pVector (ORSModel.ors.Vector3) –
-
setFactorOfCompressionHistogramA(self, factor: int) → None¶ Parameters: factor (int) –
-
setFactorOfCompressionHistogramB(self, factor: int) → None¶ Parameters: factor (int) –
-
setHistogramASize(self, value: int) → None¶ Parameters: value (int) –
-
setHistogramBSize(self, value: int) → None¶ Parameters: value (int) –
-
setMask(self, pROiMask: ORSModel.ors.ROI) → None¶ Parameters: pROiMask (ORSModel.ors.ROI) –
-
setNearestInterpolation(self, aFlag: bool) → None¶ Parameters: aFlag (bool) –
-
setRotationScaleCenter(self, pVect: ORSModel.ors.Vector3) → None¶ Parameters: pVect (ORSModel.ors.Vector3) –
-
setRotationScaleCenterAlwaysAtCenter(self, aFlag: bool) → None¶ Parameters: aFlag (bool) –
-
setSearchDeltaEpsilonRotation(self, pIInputChannel: ORSModel.ors.Channel, searchDelta: float, epsilon: float) → None¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- searchDelta (float) –
- epsilon (float) –
-
setSearchDeltaEpsilonScaleFactor(self, pIInputChannel: ORSModel.ors.Channel, searchDelta: float, epsilon: float) → None¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- searchDelta (float) –
- epsilon (float) –
-
setSearchDeltaEpsilonTranslation(self, pIInputChannel: ORSModel.ors.Channel, searchDelta: float, epsilon: float) → None¶ Parameters: - pIInputChannel (ORSModel.ors.Channel) –
- searchDelta (float) –
- epsilon (float) –
-
setSearchDeltaRotation(self, pVector: ORSModel.ors.Vector3) → None¶ Parameters: pVector (ORSModel.ors.Vector3) –
-
setSearchDeltaScaleFactor(self, pVector: ORSModel.ors.Vector3) → None¶ Parameters: pVector (ORSModel.ors.Vector3) –
-
setSearchDeltaTranslation(self, pVector: ORSModel.ors.Vector3) → None¶ Parameters: pVector (ORSModel.ors.Vector3) –
-
setSearchDirectionBox(self, pIChannelBox: ORSModel.ors.Box) → None¶ Parameters: pIChannelBox (ORSModel.ors.Box) –
-
setSearchDirectionChannel(self, pIChannel: ORSModel.ors.Channel) → None¶ Parameters: pIChannel (ORSModel.ors.Channel) –
-
setTimeA(self, time: int) → None¶ Parameters: time (int) –
-
setTimeB(self, time: int) → None¶ Parameters: time (int) –
-
setUseMultiScale(self, aFlag: bool) → None¶ Parameters: aFlag (bool) –
-
setUseMutualInfo(self, aFlag: bool) → None¶ Parameters: aFlag (bool) –
-
setXSampling(self, aSampling: int) → None¶ Parameters: aSampling (int) –
-
setYSampling(self, aSampling: int) → None¶ Parameters: aSampling (int) –
-
setZSampling(self, aSampling: int) → None¶ Parameters: aSampling (int) –
-
ChannelSliceRegistrationHelper¶
-
class
ORSModel.ors.ChannelSliceRegistrationHelper¶ Bases:
ORSModel.ors.Node-
addTranslation(self, zIndex: int, tIndex: int, aVect: ORSModel.ors.Vector3) → None¶ Parameters: - zIndex (int) –
- tIndex (int) –
- aVect (ORSModel.ors.Vector3) –
-
applySliceRegistrationToChannel(self, pInputChannel: ORSModel.ors.Channel, iTIndex: int, IProgress: ORSModel.ors.Progress, pOutputChannel: ORSModel.ors.Channel) → Channel¶ Parameters: - pInputChannel (ORSModel.ors.Channel) –
- iTIndex (int) –
- IProgress (ORSModel.ors.Progress) –
- pOutputChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) –
-
composeMatrix(self, zIndex: int, tIndex: int, aMatrix: ORSModel.ors.Matrix4x4) → None¶ Compose the transformation matrix from slice (zIndex-1) registered position to slice zIndex registered position with thw given matrix.
Parameters: - zIndex (int) –
- tIndex (int) –
- aMatrix (ORSModel.ors.Matrix4x4) –
-
copyInto(self, aDestinationRegistration: ORSModel.ors.ChannelSliceRegistrationHelper) → None¶ Parameters: aDestinationRegistration (ORSModel.ors.ChannelSliceRegistrationHelper) –
-
copyShapeFromChannel(self, aChannel: ORSModel.ors.Channel) → None¶ Parameters: aChannel (ORSModel.ors.Channel) –
-
extractSliceChannel(self, pInputChannel: ORSModel.ors.Channel, aCutPlane: ORSModel.ors.Plane, IOutputSliceChannel: ORSModel.ors.Channel, timeStep: int, IProgress: ORSModel.ors.Progress) → Channel¶ Parameters: - pInputChannel (ORSModel.ors.Channel) –
- aCutPlane (ORSModel.ors.Plane) –
- IOutputSliceChannel (ORSModel.ors.Channel) –
- timeStep (int) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Channel) –
-
extractZSliceChannel(self, pInputChannel: ORSModel.ors.Channel, aCutPlane: ORSModel.ors.Plane, IOutputSliceChannel: ORSModel.ors.Channel, timeStep: int, IProgress: ORSModel.ors.Progress) → Channel¶ Parameters: - pInputChannel (ORSModel.ors.Channel) –
- aCutPlane (ORSModel.ors.Plane) –
- IOutputSliceChannel (ORSModel.ors.Channel) –
- timeStep (int) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Channel) –
-
getApplicableChannelList(self) → List¶ Returns: output (ORSModel.ors.List) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getComposeMatrixFromSliceIToJ(self, zIndexI: int, zIndexJ: int, tIndex: int) → Matrix4x4¶ Parameters: - zIndexI (int) –
- zIndexJ (int) –
- tIndex (int) –
Returns: output (ORSModel.ors.Matrix4x4) –
-
getGlobalMatrix(self, zIndex: int, tIndex: int) → Matrix4x4¶ Returns the transformation matrix from channel original position to slice zIndex registered position.
Parameters: - zIndex (int) –
- tIndex (int) –
Returns: output (ORSModel.ors.Matrix4x4) –
-
getIsSliceUnmovable(self, zIndex: int, tIndex: int) → bool¶ Parameters: - zIndex (int) –
- tIndex (int) –
Returns: output (bool) –
-
getMatrix(self, zIndex: int, tIndex: int) → Matrix4x4¶ Returns the transformation matrix from slice (zIndex-1) registered position to slice zIndex registered position.
Parameters: - zIndex (int) –
- tIndex (int) –
Returns: output (ORSModel.ors.Matrix4x4) –
-
getMaxTranslation(self, tIndex: int) → Vector3¶ Parameters: tIndex (int) – Returns: output (ORSModel.ors.Vector3) –
-
getMaximumXOffsetBetweenSlice(self) → int¶ Returns: output (int) –
-
getMaximumYOffsetBetweenSlice(self) → int¶ Returns: output (int) –
-
getMinTranslation(self, tIndex: int) → Vector3¶ Parameters: tIndex (int) – Returns: output (ORSModel.ors.Vector3) –
-
getOpticalFluxMaximalLevelGaussianPyramid(self, aChannel: ORSModel.ors.Channel, nZIndex: int, nTIndex: int, pIBoundingBoxSearchArea: ORSModel.ors.Box) → int¶ Parameters: - aChannel (ORSModel.ors.Channel) –
- nZIndex (int) –
- nTIndex (int) –
- pIBoundingBoxSearchArea (ORSModel.ors.Box) –
Returns: output (int) –
-
getRegisteredChannelBox(self, aChannel: ORSModel.ors.Channel) → Box¶ Parameters: aChannel (ORSModel.ors.Channel) – Returns: output (ORSModel.ors.Box) –
-
getSimilarityXSampling(self) → int¶ Returns: output (int) –
-
getSimilarityYSampling(self) → int¶ Returns: output (int) –
-
getTSize(self) → int¶ Returns: output (int) –
-
getTranslation(self, zIndex: int, tIndex: int) → Vector3¶ Parameters: - zIndex (int) –
- tIndex (int) –
Returns: output (ORSModel.ors.Vector3) –
-
getZSize(self) → int¶ Returns: output (int) –
-
mergeSliceRegistrationHelper(self, pInputRegistrationHelper: ORSModel.ors.ChannelSliceRegistrationHelper, startZ: int, endZ: int, startT: int, endT: int, pOutputRegistrationHelper: ORSModel.ors.ChannelSliceRegistrationHelper) → ChannelSliceRegistrationHelper¶ Parameters: - pInputRegistrationHelper (ORSModel.ors.ChannelSliceRegistrationHelper) –
- startZ (int) –
- endZ (int) –
- startT (int) –
- endT (int) –
- pOutputRegistrationHelper (ORSModel.ors.ChannelSliceRegistrationHelper) –
Returns: output (ORSModel.ors.ChannelSliceRegistrationHelper) –
-
none()¶ ChannelSliceRegistrationHelper.__init__() -> ChannelSliceRegistrationHelper
-
registerSliceMutualInfo(self, aChannel: ORSModel.ors.Channel, startZ: int, endZ: int, tIndex: int, nbIteration: int, bResetRegistration: bool, IProgress: ORSModel.ors.Progress) → None¶ Voxel based slice registration using Mutual info algorithm.
Note
Set the parameter with setSimilarityXSampling(), setSimilarityYSampling(), setMaximumXOffsetBetweenSlice(), setMaximumYOffsetBetweenSlice()
Parameters: - aChannel (ORSModel.ors.Channel) – the channel to register (a Channel)
- startZ (int) – the slice start index (a uint32_t)
- endZ (int) – the slice end index (a uint32_t)
- tIndex (int) – the channel T index (a uint32_t)
- nbIteration (int) – the maximum number of iteration(an unsigned short)
- bResetRegistration (bool) – the progress bar (an Progress)
- IProgress (ORSModel.ors.Progress) –
-
registerSliceMutualInfoSubVoxel(self, aChannel: ORSModel.ors.Channel, startZ: int, endZ: int, tIndex: int, fDeltaTranslationX: float, fDeltaTranslationY: float, fEpsilonTranslationX: float, fEpsilonTranslationY: float, fDeltaRotation: float, fEpsilonRotation: float, bResetRegistration: bool, bUseFixReferenceSlice: bool, nFixReferenceSliceIdx: int, IProgress: ORSModel.ors.Progress) → None¶ Sub-Voxel based slice registration using Mutual info algorithm.
Parameters: - aChannel (ORSModel.ors.Channel) – the channel to register (a Channel)
- startZ (int) – the slice start index (a uint32_t)
- endZ (int) – the slice end index (a uint32_t)
- tIndex (int) – the channel T index (a uint32_t)
- fDeltaTranslationX (float) – the initial step on X axis is the first translation that will be applied and tested by the algorithm
- fDeltaTranslationY (float) – the initial step on Y axis is the first translation that will be applied and tested by the algorithm
- fEpsilonTranslationX (float) – the smallest step on X axis is the minimum distance that could be tested by the algorithm
- fEpsilonTranslationY (float) – the smallest step on Y axis is the minimum distance that could be tested by the algorithm
- fDeltaRotation (float) – the initial step is the first rotation that will be applied and tested by the algorithm
- fEpsilonRotation (float) – the smallest step is the is minimum rotation that could be tested by the algorithm
- bResetRegistration (bool) – indicate if the registration matrix should be reseted (a bool)
- bUseFixReferenceSlice (bool) – indicate if we register on a fixed slice (a bool)
- nFixReferenceSliceIdx (int) – indicate the fixed slice index (if we register on a fixed slice) (a uint32_t)
- IProgress (ORSModel.ors.Progress) – the progress bar (an Progress)
-
registerSliceOpticalFlow(self, aChannel: ORSModel.ors.Channel, startZ: int, endZ: int, tIndex: int, bUseTranslation: bool, fMinimalDistanceToStop: float, bUseRotation: bool, fMinimalRotationToStop: float, nMaxIteration: int, nGaussianPyramid: int, bUseLinearFactor: bool, bUseConstantFactor: bool, bUseMIRegistration: bool, IInterestBox: ORSModel.ors.Box, ISearchBox: ORSModel.ors.Box, bResetRegistration: bool, IProgress: ORSModel.ors.Progress) → None¶ Sub - Voxel based slice registration using Optical Flow algorithm.
Parameters: - aChannel (ORSModel.ors.Channel) – the channel to register(a Channel)
- startZ (int) – the slice start index(a uint32_t)
- endZ (int) – the slice end index(a uint32_t)
- tIndex (int) – the channel T index(a uint32_t)
- bUseTranslation (bool) – indicate that the algorithm should use translation(a bool)
- fMinimalDistanceToStop (float) – the smallest distance in translation(from the last iteration) that should be reached to stop the iterative process(a double)
- bUseRotation (bool) – indicate that the algorithm should use rotation(a bool)
- fMinimalRotationToStop (float) – smallest rotation (in radians) (from the last iteration) that should be reached to stop the iterative process(a double)
- nMaxIteration (int) – maximal number of iterations(an unsigned short)
- nGaussianPyramid (int) – the minimal level (highest resolution) of the Gaussian pyramid to use to evaluate the transformation.A value of 0 is the resolution of the input image(and is usually a source of instability); each increment of 1 of this value reduces the resolution by half and would usually increase the stability of the result and reduce the computation time. (an int)
- bUseLinearFactor (bool) – indicate if the linear factor of brightness correction(for stabilization) should be used(a bool)
- bUseConstantFactor (bool) – indicate if the constant factor of brightness correction(for stabilization) should be used.This value will be considered only if the linear factor is used. (a bool)
- bUseMIRegistration (bool) – indicate if a pass of registration by mutual information should be performed after the pass of optical flow(a bool)
- IInterestBox (ORSModel.ors.Box) – the section of the image of reference to be detected in the other image(an Box)
- ISearchBox (ORSModel.ors.Box) – the area where the section of the image of reference should be found in the other image(an Box)
- bResetRegistration (bool) – indicate if the registration matrix should be reset(a bool)
- IProgress (ORSModel.ors.Progress) – the progress bar(an Progress)
-
registerSliceSSD(self, aChannel: ORSModel.ors.Channel, startZ: int, endZ: int, tIndex: int, nbIteration: int, bResetRegistration: bool, IProgress: ORSModel.ors.Progress) → None¶ Voxel based slice registration using SSD algorithm.
Note
Set the parameter with setSimilarityXSampling(), setSimilarityYSampling(), setMaximumXOffsetBetweenSlice(), setMaximumYOffsetBetweenSlice()
Parameters: - aChannel (ORSModel.ors.Channel) – the channel to register (a Channel)
- startZ (int) – the slice start index (a uint32_t)
- endZ (int) – the slice end index (a uint32_t)
- tIndex (int) – the channel T index (a uint32_t)
- nbIteration (int) – the maximum number of iteration(an unsigned short)
- bResetRegistration (bool) – the progress bar (an Progress)
- IProgress (ORSModel.ors.Progress) –
-
registerSliceSSDSubVoxel(self, aChannel: ORSModel.ors.Channel, startZ: int, endZ: int, tIndex: int, fDeltaTranslationX: float, fDeltaTranslationY: float, fEpsilonTranslationX: float, fEpsilonTranslationY: float, fDeltaRotation: float, fEpsilonRotation: float, bResetRegistration: bool, bUseFixReferenceSlice: bool, nFixReferenceSliceIdx: int, IProgress: ORSModel.ors.Progress) → None¶ Sub-Voxel based slice registration using SSD algorithm.
Parameters: - aChannel (ORSModel.ors.Channel) – the channel to register (a Channel)
- startZ (int) – the slice start index (a uint32_t)
- endZ (int) – the slice end index (a uint32_t)
- tIndex (int) – the channel T index (a uint32_t)
- fDeltaTranslationX (float) – the initial step on X axis is the first translation that will be applied and tested by the algorithm
- fDeltaTranslationY (float) – the initial step on Y axis is the first translation that will be applied and tested by the algorithm
- fEpsilonTranslationX (float) – the smallest step on X axis is the minimum distance that could be tested by the algorithm
- fEpsilonTranslationY (float) – the smallest step on Y axis is the minimum distance that could be tested by the algorithm
- fDeltaRotation (float) – the initial step is the first rotation that will be applied and tested by the algorithm
- fEpsilonRotation (float) – the smallest step is the is minimum rotation that could be tested by the algorithm
- bResetRegistration (bool) – indicate if the registration matrix should be reseted (a bool)
- bUseFixReferenceSlice (bool) – indicate if we register on a fixed slice (a bool)
- nFixReferenceSliceIdx (int) – indicate the fixed slice index (if we register on a fixed slice) (a uint32_t)
- IProgress (ORSModel.ors.Progress) – the progress bar (an Progress)
-
resetRegistration(self) → None¶
-
setEndOfInterestZone(self, xEnd: int, yEnd: int) → None¶ Parameters: - xEnd (int) –
- yEnd (int) –
-
setIsSliceUnmovable(self, zIndex: int, tIndex: int, bUnmovable: bool) → None¶ Parameters: - zIndex (int) –
- tIndex (int) –
- bUnmovable (bool) –
-
setMatrix(self, zIndex: int, tIndex: int, aMatrix: ORSModel.ors.Matrix4x4) → None¶ Set the transformation matrix from slice (zIndex-1) registered position to slice zIndex registered position.
Parameters: - zIndex (int) –
- tIndex (int) –
- aMatrix (ORSModel.ors.Matrix4x4) –
-
setMaximumXOffsetBetweenSlice(self, maxOffset: int) → None¶ Parameters: maxOffset (int) –
-
setMaximumYOffsetBetweenSlice(self, maxOffset: int) → None¶ Parameters: maxOffset (int) –
-
setSimilarityXSampling(self, sampling: int) → None¶ Parameters: sampling (int) –
-
setSimilarityYSampling(self, sampling: int) → None¶ Parameters: sampling (int) –
-
setStartOfInterestZone(self, xStart: int, yStart: int) → None¶ Parameters: - xStart (int) –
- yStart (int) –
-
setTSize(self, tSize: int) → None¶ Parameters: tSize (int) –
-
setTranslation(self, zIndex: int, tIndex: int, aVect: ORSModel.ors.Vector3) → None¶ Parameters: - zIndex (int) –
- tIndex (int) –
- aVect (ORSModel.ors.Vector3) –
-
setZSize(self, zSize: int) → None¶ Parameters: zSize (int) –
-
ChannelSliceReplacementHelper¶
-
class
ORSModel.ors.ChannelSliceReplacementHelper¶ Bases:
ORSModel.ors.Unmanaged-
analyzeAndReplaceMarkedSlices(self) → None¶
-
canSliceReplacementBePerformed(self) → bool¶ Returns: output (bool) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ ChannelSliceReplacementHelper.__init__() -> ChannelSliceReplacementHelper
-
setChannel(self, pIInputChannel: ORSModel.ors.Channel) → None¶ Parameters: pIInputChannel (ORSModel.ors.Channel) –
-
setTime(self, value: int) → None¶ Parameters: value (int) –
-
Circle¶
-
class
ORSModel.ors.Circle¶ Bases:
ORSModel.ors.Shape2Dbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2010
-
copy(self) → Circle¶ Copies aCircle.
Note
The copied Circle has the same equation as the source Circle.
Returns: output (ORSModel.ors.Circle) – A new Circle (an Circle)
-
createFromPythonRepresentation(aPythonRepresentation: str) → Circle¶ Create aCircle from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Circle) –
-
from3Points(self, point0: ORSModel.ors.Vector3, point1: ORSModel.ors.Vector3, point2: ORSModel.ors.Vector3) → None¶ Initializes theCircle from 3 points.
Parameters: - point0 (ORSModel.ors.Vector3) – The first point (an Vector3)
- point1 (ORSModel.ors.Vector3) – The second point (an Vector3)
- point2 (ORSModel.ors.Vector3) – The third point (an Vector3)
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ set aCircle from a python representation
Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getArea(self) → float¶ Returns: output (float) –
-
getCenter(self) → Vector3¶ Returns the normal of theCircle.
Returns: output (ORSModel.ors.Vector3) – A vector (an Vector3)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getIntersectionWithLine(self, aLine: ORSModel.ors.Line) → Vector3¶ Return the vector representing the intersection of the provided line and the receiver.
Parameters: aLine (ORSModel.ors.Line) – Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3) or NULL if not intersection
-
getIntersectionWithLineSegment(self, aLineSegment: ORSModel.ors.LineSegment) → Vector3¶ Return the vector representing the intersection of the provided line and the receiver.
Parameters: aLineSegment (ORSModel.ors.LineSegment) – Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3) or NULL if not intersection
-
getIntersectionWithPlane(self, aPlane: ORSModel.ors.Plane) → LineSegment¶ Return the vector representing the intersection of the provided line and the receiver.
Parameters: aPlane (ORSModel.ors.Plane) – Returns: output (ORSModel.ors.LineSegment) – a vector (an Vector3) or NULL if not intersection
-
getIsEqualTo(self, Circle: ORSModel.ors.Circle) → bool¶ Parameters: Circle (ORSModel.ors.Circle) – Returns: output (bool) –
-
getNormal(self) → Vector3¶ Returns the normal of theCircle.
Returns: output (ORSModel.ors.Vector3) – A vector (an Vector3)
-
getPlane(self) → Plane¶ Returns: output (ORSModel.ors.Plane) –
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getRadius(self) → float¶ Returns: output (float) –
-
getRotated(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → Circle¶ Parameters: - axisOfRotation (ORSModel.ors.Vector3) –
- rotationCenter (ORSModel.ors.Vector3) –
- angle (float) –
Returns: output (ORSModel.ors.Circle) –
-
none()¶ Circle.__init__() -> Circle
-
rotate(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → None¶ Applies a rotation to the receiver.
Note
The box is a right handed bounded referential.
Parameters: - axisInWorld (ORSModel.ors.Vector3) – a rotation axis (an Vector3)
- aroundPointInWorld (ORSModel.ors.Vector3) – a center of rotation (an Vector3)
- angleInRadian (float) – an angle in radian (a double)
-
setCenter(self, aCenter: ORSModel.ors.Vector3) → None¶ Parameters: aCenter (ORSModel.ors.Vector3) –
-
setNormal(self, aNormal: ORSModel.ors.Vector3) → None¶ Returns the normal of theCircle.
Parameters: aNormal (ORSModel.ors.Vector3) –
-
setRadius(self, aRadius: float) → None¶ Parameters: aRadius (float) –
-
Collection¶
-
class
ORSModel.ors.Collection¶ Bases:
ORSModel.ors.Managedbrief_description: Abstraction class for collections. author: Normand Mongeau. version: 1.0 Abstraction class for collections. The main difference between collections and arrays is that with collections, you do not need to worry about the capacity, you can just add elements; while for arrays you need to manage the size yourself.
-
applyLinearTransformation(self, slope: float, offset: float) → None¶ Parameters: - slope (float) –
- offset (float) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getSize(self) → int¶ Returns: output (int) –
-
none()¶ Collection.__init__() -> Collection
-
Color¶
-
class
ORSModel.ors.Color¶ Bases:
ORSModel.ors.Unmanagedbrief_description: Wraps and defines colors. author: N Mongeau All other members of ORS participated. version: 1.0 date: December 2015 Defines a color. Colors are composed of components, each stored in the form of a double between 0 and 1. Colors can have as many components as wanted, but slots 0 to 3 are reserved for red, green, blue and alpha. Any additional component should thus be stored starting at index 4.
-
createFromPythonRepresentation(aPythonRepresentation: str) → Color¶ Create an OrientedPlane from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Color) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ set an OrientedPlane from a python representation
Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
fromQColor(qColor)¶
-
getAlpha(self) → float¶ Gets the alpha component of the color.
Note
Color components are expressed as values between 0 and 1.
Returns: output (float) – the alpha value (a double)
-
getAsQColor()¶
-
getBlue(self) → float¶ Gets the blue component of the color.
Note
Color components are expressed as values between 0 and 1.
Returns: output (float) – the blue value (a double)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getComponentAtIndex(self, index: int) → float¶ Gets a component of the color.
Note
Color components are expressed as values between 0 and 1.
Note
Color components indexes are zero-based.
Parameters: index (int) – the component index (a uint16_t) Returns: output (float) – a double value
-
getComponentCount(self) → int¶ Gets the number of component of the color.
Returns: output (int) – the component count (a uint16_t)
-
getComponents(self) → ArrayDouble¶ Gets all the components of the color.
Note
Color components are expressed as values between 0 and 1.
Returns: output (ORSModel.ors.ArrayDouble) – a double array (an ArrayDouble)
-
getGreen(self) → float¶ Gets the green component of the color.
Note
Color components are expressed as values between 0 and 1.
Returns: output (float) – the green value (a double)
-
getIsEqualTo(self, aColor: ORSModel.ors.Color) → bool¶ Checks for equality to another color.
Parameters: aColor (ORSModel.ors.Color) – a color (a Color) Returns: output (bool) – true if the colors are equal, false otherwise
-
getPythonRepresentation(self) → str¶ Gets a Python evaluable string representation.
Returns: output (str) –
-
getRed(self) → float¶ Gets the red component of the color.
Note
Color components are expressed as values between 0 and 1.
Returns: output (float) – the red value (a double)
-
none()¶ Color.__init__() -> Color
-
setAlpha(self, alpha: float) → None¶ Sets the alpha component of the color.
Note
Color components are expressed as values between 0 and 1.
Parameters: alpha (float) – the alpha value (a double)
-
setBlue(self, blue: float) → None¶ Sets the blue component of the color.
Note
Color components are expressed as values between 0 and 1.
Parameters: blue (float) – the blue value (a double)
-
setComponentAtIndex(self, index: int, component: float) → None¶ Sets a component of the color.
Note
Color components are expressed as values between 0 and 1.
Note
Color components indexes are zero-based.
Parameters: - index (int) – the component index (a uint16_t)
- component (float) – a double value
-
setComponents(self, components: ORSModel.ors.ArrayDouble) → None¶ Sets all the components of the color.
Note
Color components are expressed as values between 0 and 1.
Parameters: components (ORSModel.ors.ArrayDouble) – a double array (an ArrayDouble)
-
setGreen(self, green: float) → None¶ Sets the green component of the color.
Note
Color components are expressed as values between 0 and 1.
Parameters: green (float) – the green value (a double)
-
setRed(self, red: float) → None¶ Sets the red component of the color.
Note
Color components are expressed as values between 0 and 1.
Parameters: red (float) – the red value (a double)
-
ConvolutionHelper¶
-
class
ORSModel.ors.ConvolutionHelper¶ Bases:
ORSModel.ors.Unmanaged-
fastGaussian2D(self, pInputChannel: ORSModel.ors.Channel, nMinZ: int, nMaxZ: int, nMinT: int, nMaxT: int, pKernelSize: int, standarDeviation: float, nBorderHandling: int, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Parameters: - pInputChannel (ORSModel.ors.Channel) –
- nMinZ (int) –
- nMaxZ (int) –
- nMinT (int) –
- nMaxT (int) –
- pKernelSize (int) –
- standarDeviation (float) –
- nBorderHandling (int) –
- IProgress (ORSModel.ors.Progress) –
- pOutChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) –
-
get1DConvolution(self, inputValues: ORSModel.ors.Array, pKernel: ORSModel.ors.ConvolutionKernel, nBorderHandling: int, values: ORSModel.ors.Array) → Array¶ Convolutes a given 1D kernel through a Float array.
Note
The convolution’s size needs to be an odd number.
Note
The kernel is a one dimension array where the dimension is of equal size to the convolution.
Note
If a Float array is supplied as the last argument, the results are written to it, otherwise a new array is created.
Parameters: - inputValues (ORSModel.ors.Array) – the input array (an Array)
- pKernel (ORSModel.ors.ConvolutionKernel) – the kernel (a ConvolutionKernel, see note below)
- nBorderHandling (int) – The border handling algorithm to use(an int). One of: CXV_CONVOLUTION_BORDER_HANDLING_VALID: Use only the valid portion of the convolution. CXV_CONVOLUTION_BORDER_HANDLING_PADDED_SURROUND The image is padded at the borders with extra pixels with a value given by m_fPaddedValue. CXV_CONVOLUTION_BORDER_HANDLING_NEAREST_NEIGHBOR The nearest known pixel value is substituted for the unknown one. CXV_CONVOLUTION_BORDER_HANDLING_CYCLIC Consider the extended image to be a tiled version of the original, and then convolve the central image using portions of the adjacent tiles at the borders. CXV_CONVOLUTION_BORDER_HANDLING_MIRRORING A mirror image of the known image is created with the border for a mirroring axis. CXV_CONVOLUTION_BORDER_HANDLING_INTERPOLATION Unknown values are estimated by polynomial interpolation.
- values (ORSModel.ors.Array) – an optional output array to fill (an Array)
Returns: output (ORSModel.ors.Array) – the resulting output array (an Array)
-
get1DMedian(self, inputValues: ORSModel.ors.Array, kernelSize: int, nBorderHandling: int, values: ORSModel.ors.Array) → Array¶ Parameters: - inputValues (ORSModel.ors.Array) –
- kernelSize (int) –
- nBorderHandling (int) –
- values (ORSModel.ors.Array) –
Returns: output (ORSModel.ors.Array) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getConvolution(self, pInputChannel: ORSModel.ors.Channel, nMinZ: int, nMaxZ: int, nMinT: int, nMaxT: int, pKernel: ORSModel.ors.ConvolutionKernel, nBorderHandling: int, nOutputChannelDatatype: int, bLeaveDataOfOutChannelOutsizeZRangeUnaffected: bool, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Convolutes a given 2D kernel through the channel’s data.
Note
The convolution’s size needs to be an odd number.
Note
The kernel is a two dimensional array where each dimension is of equal size to the convolution. Thus a convolution size of 5 needs a kernel of 5 x 5. It should be arranged in [y][x] order.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created of the size of the input channel.
Parameters: - pInputChannel (ORSModel.ors.Channel) – the input channel (an Channel)
- nMinZ (int) – the minimal z slice index (an int)
- nMaxZ (int) – the maximal z slice index (an int)
- nMinT (int) – the kernel (a double**, see note below)
- nMaxT (int) – the convolution’s size (a short)
- pKernel (ORSModel.ors.ConvolutionKernel) – The border handling algorithm to use(an int). One of: CXV_CONVOLUTION_BORDER_HANDLING_VALID: Use only the valid portion of the convolution. CXV_CONVOLUTION_BORDER_HANDLING_PADDED_SURROUND The image is padded at the borders with extra pixels with a value given by m_fPaddedValue. CXV_CONVOLUTION_BORDER_HANDLING_NEAREST_NEIGHBOR The nearest known pixel value is substituted for the unknown one. CXV_CONVOLUTION_BORDER_HANDLING_CYCLIC Consider the extended image to be a tiled version of the original, and then convolve the central image using portions of the adjacent tiles at the borders. CXV_CONVOLUTION_BORDER_HANDLING_MIRRORING A mirror image of the known image is created with the border for a mirroring axis. CXV_CONVOLUTION_BORDER_HANDLING_INTERPOLATION Unknown values are estimated by polynomial interpolation.
- nBorderHandling (int) – a progress object (an Progress)
- nOutputChannelDatatype (int) – an optional output channel to fill(an Channel)
- bLeaveDataOfOutChannelOutsizeZRangeUnaffected (bool) –
- IProgress (ORSModel.ors.Progress) –
- pOutChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) – the resulting channel (an Channel)
-
getConvolutionSubsetOnOther(self, pInputChannel: ORSModel.ors.Channel, xMinInput: int, yMinInput: int, zMinInput: int, tMinInput: int, xSize: int, ySize: int, zSize: int, tSize: int, xMinOutput: int, yMinOutput: int, zMinOutput: int, tMinOutput: int, pKernel: ORSModel.ors.ConvolutionKernel, nBorderHandling: int, nOutputChannelDatatypeIfOutputChannelIsNull: int, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Convolutes a given 1D, 2D or 3D kernel through the channel’s data.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created of the minimal size needed to agree with the indexes of output specified.
Parameters: - pInputChannel (ORSModel.ors.Channel) – the input channel (an Channel)
- xMinInput (int) – the minimal x index of the input channel to compute the convolution on (an unsigned int)
- yMinInput (int) – the minimal y index of the input channel to compute the convolution on (an unsigned int)
- zMinInput (int) – the minimal z (slice) index of the input channel to compute the convolution on (an unsigned int)
- tMinInput (int) – the minimal t (time) index of the input channel to compute the convolution on (an unsigned int)
- xSize (int) – the number of pixels to compute in x (an unsigned int)
- ySize (int) – the number of pixels to compute in y (an unsigned int)
- zSize (int) – the number of pixels to compute in z (an unsigned int)
- tSize (int) – the number of time steps to compute (an unsigned int)
- xMinOutput (int) – the minimal x index of the output channel to write the result in (an unsigned int)
- yMinOutput (int) – the minimal y index of the output channel to write the result in (an unsigned int)
- zMinOutput (int) – the minimal z index of the output channel to write the result in (an unsigned int)
- tMinOutput (int) – the minimal t index of the output channel to write the result in (an unsigned int)
- pKernel (ORSModel.ors.ConvolutionKernel) – the kernel
- nBorderHandling (int) – The border handling algorithm to use(an int). One of: CXV_CONVOLUTION_BORDER_HANDLING_VALID: Use only the valid portion of the convolution. CXV_CONVOLUTION_BORDER_HANDLING_PADDED_SURROUND The image is padded at the borders with extra pixels with a value given by m_fPaddedValue. CXV_CONVOLUTION_BORDER_HANDLING_NEAREST_NEIGHBOR The nearest known pixel value is substituted for the unknown one. CXV_CONVOLUTION_BORDER_HANDLING_CYCLIC Consider the extended image to be a tiled version of the original, and then convolve the central image using portions of the adjacent tiles at the borders. CXV_CONVOLUTION_BORDER_HANDLING_MIRRORING A mirror image of the known image is created with the border for a mirroring axis. CXV_CONVOLUTION_BORDER_HANDLING_INTERPOLATION Unknown values are estimated by polynomial interpolation.
- nOutputChannelDatatypeIfOutputChannelIsNull (int) – the data type of the output channel, if the output channel is not given
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
- pOutChannel (ORSModel.ors.Channel) – an optional output channel to fill(an Channel)
Returns: output (ORSModel.ors.Channel) – the resulting channel (an Channel)
-
getConvolutionSubsetOnSelf(self, pInputChannel: ORSModel.ors.Channel, xMinInput: int, yMinInput: int, zMinInput: int, tMinInput: int, xSize: int, ySize: int, zSize: int, tSize: int, pKernel: ORSModel.ors.ConvolutionKernel, nBorderHandling: int, IProgress: ORSModel.ors.Progress) → None¶ Convolutes a given 1D, 2D or 3D kernel through the channel’s data.
Parameters: - pInputChannel (ORSModel.ors.Channel) – the input channel (an Channel), in which the result is written
- xMinInput (int) – the minimal x index of the input channel to compute the convolution on (an unsigned int)
- yMinInput (int) – the minimal y index of the input channel to compute the convolution on (an unsigned int)
- zMinInput (int) – the minimal z (slice) index of the input channel to compute the convolution on (an unsigned int)
- tMinInput (int) – the minimal t (time) index of the input channel to compute the convolution on (an unsigned int)
- xSize (int) – the number of pixels to compute in x (an unsigned int)
- ySize (int) – the number of pixels to compute in y (an unsigned int)
- zSize (int) – the number of pixels to compute in z (an unsigned int)
- tSize (int) – the number of time steps to compute (an unsigned int)
- pKernel (ORSModel.ors.ConvolutionKernel) – the kernel
- nBorderHandling (int) – The border handling algorithm to use(an int). One of: CXV_CONVOLUTION_BORDER_HANDLING_VALID: Use only the valid portion of the convolution. CXV_CONVOLUTION_BORDER_HANDLING_PADDED_SURROUND The image is padded at the borders with extra pixels with a value given by m_fPaddedValue. CXV_CONVOLUTION_BORDER_HANDLING_NEAREST_NEIGHBOR The nearest known pixel value is substituted for the unknown one. CXV_CONVOLUTION_BORDER_HANDLING_CYCLIC Consider the extended image to be a tiled version of the original, and then convolve the central image using portions of the adjacent tiles at the borders. CXV_CONVOLUTION_BORDER_HANDLING_MIRRORING A mirror image of the known image is created with the border for a mirroring axis. CXV_CONVOLUTION_BORDER_HANDLING_INTERPOLATION Unknown values are estimated by polynomial interpolation.
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
-
getMaximumSubsetOnOther(self, pInputChannel: ORSModel.ors.Channel, xMinInput: int, yMinInput: int, zMinInput: int, tMinInput: int, xSize: int, ySize: int, zSize: int, tSize: int, xMinOutput: int, yMinOutput: int, zMinOutput: int, tMinOutput: int, pKernel: ORSModel.ors.ConvolutionKernel, nBorderHandling: int, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Gets the maximum value over a given 1D, 2D or 3D kernel through the channel’s data.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created of the minimal size needed to agree with the indexes of output specified.
Parameters: - pInputChannel (ORSModel.ors.Channel) – the input channel (a Channel)
- xMinInput (int) – the minimal x index of the input channel to evaluate the maximum value on (a uint32_t)
- yMinInput (int) – the minimal y index of the input channel to evaluate the maximum value on (a uint32_t)
- zMinInput (int) – the minimal z (slice) index of the input channel to evaluate the maximum value on (a uint32_t)
- tMinInput (int) – the minimal t (time) index of the input channel to evaluate the maximum value on (a uint32_t)
- xSize (int) – the number of pixels to evaluate in x (a uint32_t)
- ySize (int) – the number of pixels to evaluate in y (a uint32_t)
- zSize (int) – the number of pixels to evaluate in z (a uint32_t)
- tSize (int) – the number of time steps to evaluate (a uint32_t)
- xMinOutput (int) – the minimal x index of the output channel to write the result in (a uint32_t)
- yMinOutput (int) – the minimal y index of the output channel to write the result in (a uint32_t)
- zMinOutput (int) – the minimal z index of the output channel to write the result in (a uint32_t)
- tMinOutput (int) – the minimal t index of the output channel to write the result in (a uint32_t)
- pKernel (ORSModel.ors.ConvolutionKernel) – the kernel
- nBorderHandling (int) – The border handling algorithm to use(a uint16_t). One of: CXV_CONVOLUTION_BORDER_HANDLING_VALID: Use only the valid portion of the data. CXV_CONVOLUTION_BORDER_HANDLING_PADDED_SURROUND The image is padded at the borders with extra pixels with a value given by m_fPaddedValue. CXV_CONVOLUTION_BORDER_HANDLING_NEAREST_NEIGHBOR The nearest known pixel value is substituted for the unknown one. CXV_CONVOLUTION_BORDER_HANDLING_CYCLIC Consider the extended image to be a tiled version of the original, and then evalutes the central image using portions of the adjacent tiles at the borders. CXV_CONVOLUTION_BORDER_HANDLING_MIRRORING A mirror image of the known image is created with the border for a mirroring axis. CXV_CONVOLUTION_BORDER_HANDLING_INTERPOLATION Unknown values are estimated by polynomial interpolation.
- IProgress (ORSModel.ors.Progress) – a progress object (a Progress)
- pOutChannel (ORSModel.ors.Channel) – an optional output channel to fill (a Channel)
Returns: output (ORSModel.ors.Channel) – the resulting channel (a Channel)
-
getMedian(self, pInputChannel: ORSModel.ors.Channel, nMinZ: int, nMaxZ: int, nMinT: int, nMaxT: int, pKernel: ORSModel.ors.ConvolutionKernel, nBorderHandling: int, nOutputChannelDatatype: int, bLeaveDataOfOutChannelOutsizeZRangeUnaffected: bool, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Parameters: - pInputChannel (ORSModel.ors.Channel) –
- nMinZ (int) –
- nMaxZ (int) –
- nMinT (int) –
- nMaxT (int) –
- pKernel (ORSModel.ors.ConvolutionKernel) –
- nBorderHandling (int) –
- nOutputChannelDatatype (int) –
- bLeaveDataOfOutChannelOutsizeZRangeUnaffected (bool) –
- IProgress (ORSModel.ors.Progress) –
- pOutChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) –
-
getMinimumSubsetOnOther(self, pInputChannel: ORSModel.ors.Channel, xMinInput: int, yMinInput: int, zMinInput: int, tMinInput: int, xSize: int, ySize: int, zSize: int, tSize: int, xMinOutput: int, yMinOutput: int, zMinOutput: int, tMinOutput: int, pKernel: ORSModel.ors.ConvolutionKernel, nBorderHandling: int, IProgress: ORSModel.ors.Progress, pOutChannel: ORSModel.ors.Channel) → Channel¶ Gets the minimum value over a given 1D, 2D or 3D kernel through the channel’s data.
Note
If a channel is supplied as the last argument, the results are written to it, otherwise a new channel is created of the minimal size needed to agree with the indexes of output specified.
Parameters: - pInputChannel (ORSModel.ors.Channel) – the input channel (a Channel)
- xMinInput (int) – the minimal x index of the input channel to evaluate the minimum value on (a uint32_t)
- yMinInput (int) – the minimal y index of the input channel to evaluate the minimum value on (a uint32_t)
- zMinInput (int) – the minimal z (slice) index of the input channel to evaluate the minimum value on (a uint32_t)
- tMinInput (int) – the minimal t (time) index of the input channel to evaluate the minimum value on (a uint32_t)
- xSize (int) – the number of pixels to evaluate in x (a uint32_t)
- ySize (int) – the number of pixels to evaluate in y (a uint32_t)
- zSize (int) – the number of pixels to evaluate in z (a uint32_t)
- tSize (int) – the number of time steps to evaluate (a uint32_t)
- xMinOutput (int) – the minimal x index of the output channel to write the result in (a uint32_t)
- yMinOutput (int) – the minimal y index of the output channel to write the result in (a uint32_t)
- zMinOutput (int) – the minimal z index of the output channel to write the result in (a uint32_t)
- tMinOutput (int) – the minimal t index of the output channel to write the result in (a uint32_t)
- pKernel (ORSModel.ors.ConvolutionKernel) – the kernel
- nBorderHandling (int) – The border handling algorithm to use(a uint16_t). One of: CXV_CONVOLUTION_BORDER_HANDLING_VALID: Use only the valid portion of the data. CXV_CONVOLUTION_BORDER_HANDLING_PADDED_SURROUND The image is padded at the borders with extra pixels with a value given by m_fPaddedValue. CXV_CONVOLUTION_BORDER_HANDLING_NEAREST_NEIGHBOR The nearest known pixel value is substituted for the unknown one. CXV_CONVOLUTION_BORDER_HANDLING_CYCLIC Consider the extended image to be a tiled version of the original, and then evalutes the central image using portions of the adjacent tiles at the borders. CXV_CONVOLUTION_BORDER_HANDLING_MIRRORING A mirror image of the known image is created with the border for a mirroring axis. CXV_CONVOLUTION_BORDER_HANDLING_INTERPOLATION Unknown values are estimated by polynomial interpolation.
- IProgress (ORSModel.ors.Progress) – a progress object (a Progress)
- pOutChannel (ORSModel.ors.Channel) – an optional output channel to fill (a Channel)
Returns: output (ORSModel.ors.Channel) – the resulting channel (a Channel)
-
getPaddingValue(self) → float¶ Returns: output (float) –
-
getZOffsetInputToOutputWithOutsideZRangeUnaffected(self) → int¶ Returns: output (int) –
-
none()¶ ConvolutionHelper.__init__() -> ConvolutionHelper
-
setPaddingValue(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setZOffsetInputToOutputWithOutsideZRangeUnaffected(self, aValue: int) → None¶ Parameters: aValue (int) –
-
ConvolutionKernel¶
-
class
ORSModel.ors.ConvolutionKernel¶ Bases:
ORSModel.ors.Unmanaged-
createFromPythonRepresentation(aPythonRepresentation: str) → ConvolutionKernel¶ Create aConvolutionKernel from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.ConvolutionKernel) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ set aConvolutionKernel from a python representation
Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getElementSummation(self) → float¶ Returns: output (float) –
-
getIs1DKernel(self) → bool¶ Returns: output (bool) –
-
getIs2DKernel(self) → bool¶ Returns: output (bool) –
-
getIs3DKernel(self) → bool¶ Returns: output (bool) –
-
getIsEqualTo(self, aConvolutionKernel: ORSModel.ors.ConvolutionKernel) → bool¶ Checks for equality to another kernel.
Parameters: aConvolutionKernel (ORSModel.ors.ConvolutionKernel) – a kernel (a ConvolutionKernel) Returns: output (bool) – TRUE if the kernels are equal, FALSE otherwise
-
getKernelStarPoint(self, pIndexX: int, pIndexY: int, pIndexZ: int) → None¶ Parameters: - pIndexX (int) –
- pIndexY (int) –
- pIndexZ (int) –
-
getKernelXSize(self) → int¶ Returns: output (int) –
-
getKernelYSize(self) → int¶ Returns: output (int) –
-
getKernelZSize(self) → int¶ Returns: output (int) –
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getValueAt(self, indexX: int, indexY: int, indexZ: int) → float¶ Parameters: - indexX (int) –
- indexY (int) –
- indexZ (int) –
Returns: output (float) –
-
initializeAs1DKernel(self, indexX: int) → None¶ Parameters: indexX (int) –
-
initializeAs2DKernel(self, indexX: int, indexY: int) → None¶ Parameters: - indexX (int) –
- indexY (int) –
-
initializeAs3DKernel(self, indexX: int, indexY: int, indexZ: int) → None¶ Parameters: - indexX (int) –
- indexY (int) –
- indexZ (int) –
-
multiplyAllElementBy(self, aValue: float) → None¶ Parameters: aValue (float) –
-
none()¶ ConvolutionKernel.__init__() -> ConvolutionKernel
-
setAsGaussianWithMinimumUnnormalizedSmallestValue(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setAsGaussianWithStandarDeviation(self, sigma: float) → None¶ Parameters: sigma (float) –
-
setKernelStarPoint(self, indexX: int, indexY: int, indexZ: int) → None¶ Parameters: - indexX (int) –
- indexY (int) –
- indexZ (int) –
-
setValueAt(self, indexX: int, indexY: int, indexZ: int, aValue: float) → None¶ Parameters: - indexX (int) –
- indexY (int) –
- indexZ (int) –
- aValue (float) –
-
Cursor3D¶
-
class
ORSModel.ors.Cursor3D¶ Bases:
ORSModel.ors.Visualbrief_description: A visual artifact used to illustrate a position in a 3D referential. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005
-
getActivePlaneColor(self) → Color¶ Gets the active plane color of the 3D cursor.
Note
The color is expressed in RGB fashion.
Returns: output (ORSModel.ors.Color) – a color (an Color)
-
getAllHighlightedViewAnchorsInView(self, pCurrentDisplay: ORSModel.ors.View) → List¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (ORSModel.ors.List) –
-
getAllHighlightedViewLineInView(self, pCurrentDisplay: ORSModel.ors.View) → List¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (ORSModel.ors.List) –
-
getAllHighlightedViewMIPLineInView(self, pCurrentDisplay: ORSModel.ors.View) → List¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (ORSModel.ors.List) –
-
getAllParentViewsExcludingCurrent(self, pCurrentDisplay: ORSModel.ors.View) → List¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (ORSModel.ors.List) –
-
getAllParentViewsExcludingCurrentCount(self, pCurrentDisplay: ORSModel.ors.View) → int¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (int) –
-
getAllShownViewAnchorsInView(self, pCurrentDisplay: ORSModel.ors.View) → List¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (ORSModel.ors.List) –
-
getAllShownViewMIPLineInView(self, pCurrentDisplay: ORSModel.ors.View) → List¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (ORSModel.ors.List) –
-
getAnyHighlightedViewLineInView(self, pCurrentDisplay: ORSModel.ors.View) → bool¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (bool) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getColor(self) → Color¶ Gets the color of the 3D cursor.
Note
The color is expressed in RGB fashion.
Returns: output (ORSModel.ors.Color) – a color (an Color)
-
getCrossHairMode(self) → int¶ Gets the crosshair mode of the 3D cursor.
Note
See the Cxv3DCursor_Crosshair enum in the ORS_def.h header file for valid crosshair modes.
Returns: output (int) – a crosshair mode (a int32_t)
-
getCrossHairWidth(self) → float¶ Returns: output (float) –
-
getHideReferenceLinesInCurrentView(self) → bool¶ Returns: output (bool) –
-
getHighlightedCircleInView(self, pCurrentDisplay: ORSModel.ors.View) → bool¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (bool) –
-
getHighlightedObliqueSliderInView(self, pCurrentDisplay: ORSModel.ors.View) → bool¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (bool) –
-
getIsHighlightedViewAnchorsInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View) → bool¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
Returns: output (bool) –
-
getIsHighlightedViewLineInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View) → bool¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
Returns: output (bool) –
-
getIsHighlightedViewMIPLineInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View) → bool¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
Returns: output (bool) –
-
getIsShowViewAnchorsInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View) → bool¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
Returns: output (bool) –
-
getIsShowViewMIPLineInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View) → bool¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
Returns: output (bool) –
-
getLineThickness(self) → float¶ Gets the line thickness (in screen one thousandths)
Returns: output (float) –
-
getMiddleHoleSize(self) → float¶ Gets the size of the blank hole in the middle of the 3D cursor (in screen one thousandths)
Returns: output (float) –
-
getPickAnchor(self, pDisplay: ORSModel.ors.View, pixelXPositionInDisplay: int, pixelYPositionInDisplay: int) → View¶ Picks for an anchor in the given display.
Parameters: - pDisplay (ORSModel.ors.View) – a display (an View)
- pixelXPositionInDisplay (int) –
- pixelYPositionInDisplay (int) –
Returns: output (ORSModel.ors.View) – aView
-
getPickMIPAnchor(self, pDisplay: ORSModel.ors.View, pixelXPositionInDisplay: int, pixelYPositionInDisplay: int) → View¶ Parameters: - pDisplay (ORSModel.ors.View) –
- pixelXPositionInDisplay (int) –
- pixelYPositionInDisplay (int) –
Returns: output (ORSModel.ors.View) –
-
getPickMPRAnchor(self, pDisplay: ORSModel.ors.View, pixelXPositionInDisplay: int, pixelYPositionInDisplay: int) → View¶ Parameters: - pDisplay (ORSModel.ors.View) –
- pixelXPositionInDisplay (int) –
- pixelYPositionInDisplay (int) –
Returns: output (ORSModel.ors.View) –
-
getPickObliqueCircleAnchor(self, pDisplay: ORSModel.ors.View, pixelXPositionInDisplay: int, pixelYPositionInDisplay: int) → bool¶ Parameters: - pDisplay (ORSModel.ors.View) –
- pixelXPositionInDisplay (int) –
- pixelYPositionInDisplay (int) –
Returns: output (bool) –
-
getPickObliqueSliderAnchor(self, pDisplay: ORSModel.ors.View, pixelXPositionInDisplay: int, pixelYPositionInDisplay: int) → int¶ Parameters: - pDisplay (ORSModel.ors.View) –
- pixelXPositionInDisplay (int) –
- pixelYPositionInDisplay (int) –
Returns: output (int) –
-
getPosition(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getShowAllSynchStudyReferenceLines(self) → bool¶ Returns: output (bool) –
-
getShowCircleForView(self, pCurrentDisplay: ORSModel.ors.View) → bool¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (bool) –
-
getShowFirstLastSynchStudyReferenceLines(self) → bool¶ Returns: output (bool) –
-
getShowObliqueSliderForView(self, pCurrentDisplay: ORSModel.ors.View) → bool¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (bool) –
-
getShowSynchStudyReferenceLine(self) → bool¶ Returns: output (bool) –
-
getSynchronizedMode(self) → bool¶ Returns: output (bool) –
-
getViewsDefineAValidCursorPosition(self, pCurrentDisplay: ORSModel.ors.View) → bool¶ Parameters: pCurrentDisplay (ORSModel.ors.View) – Returns: output (bool) –
-
hideAllCircle(self) → None¶
-
hideAllMIPLine(self) → None¶
-
hideAllObliqueSlider(self) → None¶
-
hideAllViewAnchors(self) → None¶
-
none()¶ Cursor3D.__init__() -> Cursor3D
-
setActivePlaneColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the active plane color of the 3D cursor.
Note
The color is expressed in RGB fashion.
Parameters: IColor (ORSModel.ors.Color) – a color (an Color)
-
setColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the color of the 3D cursor.
Note
The color is expressed in RGB fashion.
Parameters: IColor (ORSModel.ors.Color) – a color (an Color)
-
setCrossHairMode(self, iMode: int) → None¶ Sets the crosshair mode of the 3D cursor.
Note
See the Cxv3DCursor_Crosshair enum in the ORS_def.h header file for valid crosshair modes.
Parameters: iMode (int) – a crosshair mode (a int32_t*)
-
setCrossHairWidth(self, value: float) → None¶ Parameters: value (float) –
-
setCursorPositionFromParentView(self, pDisplay: ORSModel.ors.View) → bool¶ Parameters: pDisplay (ORSModel.ors.View) – Returns: output (bool) –
-
setHideReferenceLinesInCurrentView(self, value: bool) → None¶ Parameters: value (bool) –
-
setHighlightedCircleInView(self, pCurrentDisplay: ORSModel.ors.View, highlight: bool) → None¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- highlight (bool) –
-
setHighlightedObliqueSliderInView(self, pCurrentDisplay: ORSModel.ors.View, highlight: bool) → None¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- highlight (bool) –
-
setHighlightedViewAnchorsInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View, highlight: bool) → None¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
- highlight (bool) –
-
setHighlightedViewLineInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View, highlight: bool) → None¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
- highlight (bool) –
-
setHighlightedViewMIPLineInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View, highlight: bool) → None¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
- highlight (bool) –
-
setLineThickness(self, value: float) → None¶ Sets the line thickness (in screen one thousandths)
Parameters: value (float) –
-
setMiddleHoleSize(self, value: float) → None¶ Sets the size of the blank hole in the middle of the 3D cursor (in screen one thousandths)
Parameters: value (float) –
-
setPosition(self, pPosition: ORSModel.ors.Vector3) → None¶ Sets the position of the 3D cursor.
Parameters: pPosition (ORSModel.ors.Vector3) – a screen position (an Vector3)
-
setShowAllSynchStudyReferenceLines(self, value: bool) → None¶ Parameters: value (bool) –
-
setShowCircleInView(self, pCurrentDisplay: ORSModel.ors.View, showC: bool) → None¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- showC (bool) –
-
setShowFirstLastSynchStudyReferenceLines(self, value: bool) → None¶ Parameters: value (bool) –
-
setShowObliqueSliderInView(self, pCurrentDisplay: ORSModel.ors.View, showO: bool) → None¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- showO (bool) –
-
setShowSynchStudyReferenceLine(self, value: bool) → None¶ Parameters: value (bool) –
-
setShowViewAnchorsInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View, showA: bool) → None¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
- showA (bool) –
-
setShowViewMIPLineInView(self, pCurrentDisplay: ORSModel.ors.View, anotherDisplay: ORSModel.ors.View, showA: bool) → None¶ Parameters: - pCurrentDisplay (ORSModel.ors.View) –
- anotherDisplay (ORSModel.ors.View) –
- showA (bool) –
-
setSynchronizedMode(self, aBool: bool) → None¶ Parameters: aBool (bool) –
-
unHighlightedAllCircle(self) → None¶
-
unHighlightedAllMIPLine(self) → None¶
-
unHighlightedAllObliqueSlider(self) → None¶
-
unHighlightedAllViewAnchors(self) → None¶
-
unHighlightedAllViewLine(self) → None¶
-
Cylinder¶
-
class
ORSModel.ors.Cylinder¶ Bases:
ORSModel.ors.Shape3Dbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2010
-
copy(self) → Cylinder¶ Copies aCylinder.
Note
The copied Cylinder has the same equation as the source Cylinder.
Returns: output (ORSModel.ors.Cylinder) – A new Cylinder (an Cylinder)
-
createFromPythonRepresentation(aPythonRepresentation: str) → Cylinder¶ Create aCylinder from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Cylinder) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ set aCylinder from a python representation
Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getAxis(self) → Vector3¶ Returns the normal of theCylinder.
Returns: output (ORSModel.ors.Vector3) – A vector (an Vector3)
-
getCap1Center(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getCap2Center(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getCenter(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getHeight(self) → float¶ GetsCylinder Height.
Returns: output (float) – An Height (a double)
-
getIntersectionWithLine(self, aLine: ORSModel.ors.Line) → LineSegment¶ Return the vector representing the intersection of the provided line segment and the receiver.
Parameters: aLine (ORSModel.ors.Line) – Returns: output (ORSModel.ors.LineSegment) – a vector (an Vector3) or NULL if not intersection
-
getIntersectionWithLineSegment(self, aLineSegment: ORSModel.ors.LineSegment) → LineSegment¶ Return the vector representing the intersection of the provided line segment and the receiver.
Parameters: aLineSegment (ORSModel.ors.LineSegment) – Returns: output (ORSModel.ors.LineSegment) – a vector (an Vector3) or NULL if not intersection
-
getIsEqualTo(self, Cylinder: ORSModel.ors.Cylinder) → bool¶ Verifies equality between the receiver and a givenCylinder.
Parameters: Cylinder (ORSModel.ors.Cylinder) – Returns: output (bool) – TRUE if the argument Cylinder is equal to the receiver, FALSE otherwise
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getRadius(self) → float¶ Returns: output (float) –
-
getRotated(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → Cylinder¶ Parameters: - axisOfRotation (ORSModel.ors.Vector3) –
- rotationCenter (ORSModel.ors.Vector3) –
- angle (float) –
Returns: output (ORSModel.ors.Cylinder) –
-
getSurface(self) → float¶ GetsCylinder Surface.
Returns: output (float) – A Surface (a double)
-
getVolume(self) → float¶ GetsCylinder Volume.
Returns: output (float) – A Volume (a double)
-
none()¶ Cylinder.__init__() -> Cylinder
-
rotate(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → None¶ Applies a rotation to the receiver.
Note
The box is a right handed bounded referential.
Parameters: - axisInWorld (ORSModel.ors.Vector3) – a rotation axis (an Vector3)
- aroundPointInWorld (ORSModel.ors.Vector3) – a center of rotation (an Vector3)
- angleInRadian (float) – an angle in radian (a double)
-
setCap1Center(self, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: aPoint (ORSModel.ors.Vector3) –
-
setCap2Center(self, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: aPoint (ORSModel.ors.Vector3) –
-
setCenter(self, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: aPoint (ORSModel.ors.Vector3) –
-
setRadius(self, aRadius: float) → None¶ Parameters: aRadius (float) –
-
DatasetPresenter¶
-
class
ORSModel.ors.DatasetPresenter¶ Bases:
ORSModel.ors.Visual-
get2DWindowLevel2Center(self) → float¶ Returns: output (float) –
-
get2DWindowLevel2Max(self) → float¶ Returns: output (float) –
-
get2DWindowLevel2Min(self) → float¶ Returns: output (float) –
-
get2DWindowLevel2Range(self, fMin: float, fMax: float) → None¶ Gets the current second level 2D window level values range.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Note
Return values are written to the supplied arguments.
Returns: - fMin (float) – The lower range value (a double)
- fMax (float) – The upper range value (a double)
-
get2DWindowLevel2Values(self, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the second 2D window level values for the double leveling mode.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
Return values are written to the supplied arguments.
Parameters: - pWindowWidth (float) –
- pWindowCenter (float) –
-
get2DWindowLevel2Width(self) → float¶ Returns: output (float) –
-
get2DWindowLevelCenterForAllViews(self) → float¶ Returns: output (float) –
-
get2DWindowLevelCenterForView(self, pDisplay: ORSModel.ors.View) → float¶ Parameters: pDisplay (ORSModel.ors.View) – Returns: output (float) –
-
get2DWindowLevelMaxForAllViews(self) → float¶ Returns: output (float) –
-
get2DWindowLevelMaxForView(self, pDisplay: ORSModel.ors.View) → float¶ Parameters: pDisplay (ORSModel.ors.View) – Returns: output (float) –
-
get2DWindowLevelMinForAllViews(self) → float¶ Returns: output (float) –
-
get2DWindowLevelMinForView(self, pDisplay: ORSModel.ors.View) → float¶ Parameters: pDisplay (ORSModel.ors.View) – Returns: output (float) –
-
get2DWindowLevelRangeForAllViews(self, pMin: float, pMax: float) → None¶ Gets the current 2D window level range values, for all displays.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Note
Return values are written to the supplied arguments.
Returns: - pMin (float) – The current 2D window level range lower value (a double)
- pMax (float) – The current 2D window level range supper value (a double)
-
get2DWindowLevelRangeForView(self, pDisplay: ORSModel.ors.View, pMin: float, pMax: float) → None¶ Gets the current 2D window level range values.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Note
Return values are written to the supplied arguments.
Parameters: pMax (float) –
Returns: - pDisplay (ORSModel.ors.View) – The current 2D window level range lower value (a double)
- pMin (float) – The current 2D window level range supper value (a double)
-
get2DWindowLevelValuesForAllViews(self, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the current 3D window level values (width and center) for all displays.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
Return values are written to the supplied arguments.
Returns: - pWindowWidth (float) – the window level width (a double*)
- pWindowCenter (float) – the window level center (a double*)
-
get2DWindowLevelValuesForView(self, pDisplay: ORSModel.ors.View, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the current 2D window level values (width and center) for a given display.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
Return values are written to the supplied arguments.
Parameters: pDisplay (ORSModel.ors.View) – the display (an View)
Returns: - pWindowWidth (float) – the window level width (a double*)
- pWindowCenter (float) – the window level center (a double*)
-
get2DWindowLevelWidthForAllViews(self) → float¶ Returns: output (float) –
-
get2DWindowLevelWidthForView(self, pDisplay: ORSModel.ors.View) → float¶ Parameters: pDisplay (ORSModel.ors.View) – Returns: output (float) –
-
get3DWindowLevelCenterForAllViews(self) → float¶ Returns: output (float) –
-
get3DWindowLevelCenterForView(self, pDisplay: ORSModel.ors.View) → float¶ Parameters: pDisplay (ORSModel.ors.View) – Returns: output (float) –
-
get3DWindowLevelMaxForAllViews(self) → float¶ Returns: output (float) –
-
get3DWindowLevelMaxForView(self, pDisplay: ORSModel.ors.View) → float¶ Parameters: pDisplay (ORSModel.ors.View) – Returns: output (float) –
-
get3DWindowLevelMinForAllViews(self) → float¶ Returns: output (float) –
-
get3DWindowLevelMinForView(self, pDisplay: ORSModel.ors.View) → float¶ Parameters: pDisplay (ORSModel.ors.View) – Returns: output (float) –
-
get3DWindowLevelRangeForAllViews(self, pMin: float, pMax: float) → None¶ Gets the current 2D window level range values, for all displays.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Note
Return values are written to the supplied arguments.
Returns: - pMin (float) – The current 2D window level range lower value (a double)
- pMax (float) – The current 2D window level range supper value (a double)
-
get3DWindowLevelRangeForView(self, IDisplay: ORSModel.ors.View, pMin: float, pMax: float) → None¶ Gets the current 2D window level range values.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Note
Return values are written to the supplied arguments.
Parameters: pMax (float) –
Returns: - IDisplay (ORSModel.ors.View) – The current 2D window level range lower value (a double)
- pMin (float) – The current 2D window level range supper value (a double)
-
get3DWindowLevelValuesForAllViews(self, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the current 3D window level values (width and center) for all views.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D views.
Note
The values are expressed in physical units.
Note
Return values are written to the supplied arguments.
Returns: - pWindowWidth (float) – the window level width (a double*)
- pWindowCenter (float) – the window level center (a double*)
-
get3DWindowLevelValuesForView(self, pDisplay: ORSModel.ors.View, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the current 2D window level values (width and center) for a given display.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
Return values are written to the supplied arguments.
Parameters: pDisplay (ORSModel.ors.View) – the display (an View)
Returns: - pWindowWidth (float) – the window level width (a double*)
- pWindowCenter (float) – the window level center (a double*)
-
get3DWindowLevelWidthForAllViews(self) → float¶ Returns: output (float) –
-
get3DWindowLevelWidthForView(self, pDisplay: ORSModel.ors.View) → float¶ Parameters: pDisplay (ORSModel.ors.View) – Returns: output (float) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getRangeSelectionColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getUseLUTAlphaIn2DForAllViews(self) → bool¶ Ask the dataset presenter to use the applied lut alpha component.
Returns: output (bool) – bool
-
getUseLUTAlphaIn2DForView(self, pDisplay: ORSModel.ors.View) → bool¶ Ask the dataset presenter to use the applied lut alpha component.
Parameters: pDisplay (ORSModel.ors.View) – the view (an View) Returns: output (bool) – bool
-
none()¶ DatasetPresenter.__init__() -> DatasetPresenter
-
set2DWindowLevel2Range(self, fMin: float, fMax: float) → None¶ Sets the current second level 2D window level values range.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Parameters: - fMin (float) – The lower range value (a double)
- fMax (float) – The upper range value (a double)
-
set2DWindowLevel2Values(self, pWindowWidth: float, pWindowCenter: float) → None¶ Sets the second 2D window level values for the double leveling mode.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values should be expressed in physical units.
Parameters: - pWindowWidth (float) – the window width (a float)
- pWindowCenter (float) – the window center (a float)
-
set2DWindowLevelRangeForAllViews(self, iMin: float, iMax: float) → None¶ Sets the current 2D window level values via a range, for all displays.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Parameters: - iMin (float) – The lower range value (a double)
- iMax (float) – The upper range value (a double)
-
set2DWindowLevelRangeForView(self, pDisplay: ORSModel.ors.View, iMin: float, iMax: float) → None¶ Sets the current 2D window level values via a range, for a given display.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Parameters: - pDisplay (ORSModel.ors.View) – The lower range value (a double)
- iMin (float) – The upper range value (a double)
- iMax (float) –
-
set2DWindowLevelValuesForAllViews(self, iWindowWidth: float, iWindowCenter: float) → None¶ Sets the current 2D window level values (width and center) for all displays.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values should be expressed in physical units.
Parameters: - iWindowWidth (float) – the window width (a double)
- iWindowCenter (float) – the window center (a double)
-
set2DWindowLevelValuesForView(self, pDisplay: ORSModel.ors.View, iWindowWidth: float, iWindowCenter: float) → None¶ Sets the current 3D window level values (width and center).
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values should be expressed in physical units.
Parameters: - pDisplay (ORSModel.ors.View) – the display (an View)
- iWindowWidth (float) – the window level width (a double)
- iWindowCenter (float) – the window level center (a double)
-
set3DWindowLevelRangeForAllViews(self, iMin: float, iMax: float) → None¶ Sets the current 2D window level values via a range, for all displays.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Parameters: - iMin (float) – The lower range value (a double)
- iMax (float) – The upper range value (a double)
-
set3DWindowLevelRangeForView(self, IDisplay: ORSModel.ors.View, iMin: float, iMax: float) → None¶ Sets the current 2D window level values via a range, for a given display.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values are expressed in physical units.
Note
The level width and center can be derived from the min/max.
Parameters: - IDisplay (ORSModel.ors.View) – The lower range value (a double)
- iMin (float) – The upper range value (a double)
- iMax (float) –
-
set3DWindowLevelValuesForAllViews(self, iWindowWidth: float, iWindowCenter: float) → None¶ Sets the current 2D window level values (width and center) for all displays.
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values should be expressed in physical units.
Parameters: - iWindowWidth (float) – the window width (a double)
- iWindowCenter (float) – the window center (a double)
-
set3DWindowLevelValuesForView(self, pDisplay: ORSModel.ors.View, iWindowWidth: float, iWindowCenter: float) → None¶ Sets the current 3D window level values (width and center).
Note
Volumes support two leveling modes, one for 3D displays and the other for 2D displays.
Note
The values should be expressed in physical units.
Parameters: - pDisplay (ORSModel.ors.View) – the display (an View)
- iWindowWidth (float) – the window level width (a double)
- iWindowCenter (float) – the window level center (a double)
-
setRangeSelectionColor(self, IColor: ORSModel.ors.Color) → None¶ Parameters: IColor (ORSModel.ors.Color) –
-
setUseLUTAlphaIn2DForAllViews(self, aFlag: bool) → None¶ Tell the dataset presenter to use the applied lut alpha componenet.
Parameters: aFlag (bool) – bool
-
setUseLUTAlphaIn2DForView(self, pDisplay: ORSModel.ors.View, aFlag: bool) → None¶ Tell the dataset presenter to use the applied lut alpha componenet.
Parameters: - pDisplay (ORSModel.ors.View) – the view (an View)
- aFlag (bool) – bool
-
Dijkstra¶
-
class
ORSModel.ors.Dijkstra¶ Bases:
ORSModel.ors.Unmanaged-
cleanDistanceMapChannel(self, outputChannel: ORSModel.ors.Channel) → None¶ Removes boundaries or non reached value from a distance map channel.
Parameters: outputChannel (ORSModel.ors.Channel) – a distance map channel (an Channel)
-
createDistanceMap(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, lOutputChannelTraceBack: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel) → None¶ Creates a distance map starting from all the providedROI sources.
Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) – the distance map generated by the Dijkstra algorithm (an Channel)
- lOutputChannelTraceBack (ORSModel.ors.Channel) – a traceback channel, can be NULL (an Channel)
- lOutputChannelLabel (ORSModel.ors.Channel) – a label channel, can be NULL (an Channel)
-
createDistanceMapForMaxDistance(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, maxDistance: float, lOutputChannelTraceBack: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel, continueDijkstra: bool) → None¶ Creates a distance map until a providedDijkstra distance is reached, starting from all the provided ROI sources.
Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) – the distance map generated by the Dijkstra algorithm (an Channel)
- maxDistance (float) – the Dijkstra distance to reach before stopping to process new voxels (a double)
- lOutputChannelTraceBack (ORSModel.ors.Channel) – a traceback channel, can be NULL (an Channel)
- lOutputChannelLabel (ORSModel.ors.Channel) – a label channel, can be NULL (an Channel)
- continueDijkstra (bool) – TRUE if it is not the first time this call is done on this instance of Dijkstra with the same distance map and that the algorithm must continue, FALSE to start over
-
createDistanceMapForNBIteration(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, forNbIteration: int, lOutputChannelTraceBack: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel, autoUpdateROI: bool, continueDijkstra: bool) → None¶ Creates a distance map for a given number of voxels, starting from all the providedROI sources.
Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) – the distance map generated by the Dijkstra algorithm (an Channel)
- forNbIteration (int) – the number of voxels to be processed by the Dijkstra algorithm (an unsigned int)
- lOutputChannelTraceBack (ORSModel.ors.Channel) – a traceback channel, can be NULL (an Channel)
- lOutputChannelLabel (ORSModel.ors.Channel) – a label channel, can be NULL (an Channel)
- autoUpdateROI (bool) – TRUE if the source ROIs should be updated with their diffusion result, FALSE otherwise
- continueDijkstra (bool) – TRUE if it is not the first time this call is done on this instance of Dijkstra with the same distance map and that the algorithm must continue, FALSE to start over
-
createDistanceMapUntilAnyPointInTargetRoiIsReached(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, aTargetVolumeROI: ORSModel.ors.ROI, lOutputChannelTraceBack: ORSModel.ors.Channel, continueDijkstra: bool) → None¶ Creates a distance map until any stop point provided in aROI are reached, starting from all the provided ROI sources.
Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) – the distance map generated by the Dijkstra algorithm (an Channel)
- aTargetVolumeROI (ORSModel.ors.ROI) – TODO DOCUMENT_ME
- lOutputChannelTraceBack (ORSModel.ors.Channel) – a traceback channel, can be None (a Channel)
- continueDijkstra (bool) – a label channel, can be None (a Channel)
-
createDistanceMapUntilPointInWorldCoordinatesIsReached(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, xStopPointInWorld: float, yStopPointInWorld: float, zStopPointInWorld: float, lOutputChannelTraceBack: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel, continueDijkstra: bool) → None¶ Creates a distance map until a stop point provided in world coordinates is reached, starting from all the providedROI sources.
Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) – the distance map generated by the Dijkstra algorithm (an Channel)
- xStopPointInWorld (float) – X position of a world coordinate
- yStopPointInWorld (float) – Y position of a world coordinate
- zStopPointInWorld (float) – Z position of a world coordinate
- lOutputChannelTraceBack (ORSModel.ors.Channel) – the number of voxels to be processed after the stop condition is matched (an uint32_t)
- lOutputChannelLabel (ORSModel.ors.Channel) – a traceback channel, can be NULL (an Channel)
- continueDijkstra (bool) – a label channel, can be NULL (an Channel)
-
createDistanceMapUntilPointsAreReached(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, positionTripleInSourceRef: int, nbPosition: int, waitForNIndex: int, lOutputChannelTraceBack: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel, breakForAny: bool, continueDijkstra: bool) → None¶ Creates a distance map until any or all stop points provided are reached, starting from all the providedROI sources.
Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) – the distance map generated by the Dijkstra algorithm (an Channel)
- positionTripleInSourceRef (int) – a collection of x,y,z triplets stop points in input channel referential (an uint32_t*)
- nbPosition (int) – the number of triplets present in the collection of triplets stop points (an uint32_t)
- waitForNIndex (int) – the number of voxels to be processed after the stop condition is matched (an uint32_t)
- lOutputChannelTraceBack (ORSModel.ors.Channel) – a traceback channel, can be NULL (an Channel)
- lOutputChannelLabel (ORSModel.ors.Channel) – a label channel, can be NULL (an Channel)
- breakForAny (bool) – TRUE if the algorithm has to stop for any points, FALSE if all the points have to be reached to stop
- continueDijkstra (bool) – TRUE if it is not the first time this call is done on this instance of Dijkstra with the same distance map and that the algorithm must continue, FALSE to start over
-
getAlphaParameter(self) → float¶ Gets the alpha parameter for the metric == 1.
Note
Only useful when metric is set to 1.
Returns: output (float) – the alpha parameter (an double)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getEuclideanBias(self) → float¶ Gets the Euclidean bias that will be the minimumDijkstra distance between voxels.
Note
Neighbors of distance 1 will have a bias of spacialTerm
Note
Neighbors of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm
Note
Neighbors of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm
Returns: output (float) – the minimum distance between voxels (an double)
-
getGaussianPeakCenterValue(self) → float¶ Sets the peak position of the gaussian used if the metric == 1.
Note
Only useful when metric is set to 1.
Returns: output (float) – peak center of the gaussian (a double)
-
getIndexOfStopPointReach(self) → int¶ Retrieve the index reached by theDijkstra algorithm.
Note
Only useful when distance map was generated using methods createDistanceMapUntilAnyPointInTargetRoiIsReached, createDistanceMapUntilPointInWorldCoordinatesIsReached or createDistanceMapUntilPointsAreReached.
Returns: output (int) – index in the input channel (a int64_t)
-
getKappa(self) → float¶ Gets the kappa parameter for the metric == 1.
Note
Only useful when metric is set to 1.
Returns: output (float) – the kappa parameter (an double)
-
getMetric(self) → int¶ Gets the metric used by theDijkstra algorithm.
Note
If the metric chosen is 0, the metric function will be: DijkstraDistanceBetween(a,b) = (Ia-Ib)^2 + EuclideanBias*EuclideanDistance(a,b);
Note
If the metric chosen is 1, the metric function will be: DijkstraDistanceBetween(a,b) = (Ia-Ib)^2 + EuclideanBias*EuclideanDistance(a,b) + alpha(1.0 - exp(-(b-gaussianPeakCenterValue)^2/kappa*sigmaPow2)); where a and b are Neighbor, Ia and Ib are intensity at a and b
Returns: output (int) – 0 or 1
-
getNeighborCount(self) → int¶ Gets the number of neighbors used by theDijkstra algorithm (the connectivity).
Note
Can be 6, 18 or 26
Returns: output (int) – the number of neighbors (an char)
-
getROI(self, index: int) → ROI¶ Retrieves a particularROI from the index specified slot.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: index (int) – the slot index (an unsigned char) Returns: output (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI), or NULL if no ROI is at that slot
-
getROICount(self) → int¶ Returns the number of ROIs that have been set as sources.
Note
A maximum of 10 ROI can be provided.
Returns: output (int) – the number of ROIs that have been provided (an char)
-
getSigmaPow2(self) → float¶ Gets the variance used by the gaussian used if the metric == 1.
Note
Only useful when metric is set to 1.
Returns: output (float) – variance of the gaussian (an double)
-
none()¶ Dijkstra.__init__() -> Dijkstra
-
resetROIs(self) → None¶ Empties all the sourceROI slots.
-
setAlphaParameter(self, alpha: float) → None¶ Sets the alpha parameter for the metric == 1.
Note
Only useful when metric is set to 1.
Parameters: alpha (float) – the alpha parameter (an double)
-
setEuclideanBias(self, EuclideanBias: float) → None¶ Provides an Euclidean bias that will be the minimumDijkstra distance between voxels.
Note
Neighbors of distance 1 will have a bias of spacialTerm.
Note
Neighbors of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm.
Note
Neighbors of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm.
Parameters: EuclideanBias (float) – the minimum distance between voxels (a double)
-
setGaussianPeakCenterValue(self, aPeakCenter: float) → None¶ Sets the peak position of the gaussian used if the metric == 1.
Note
Only useful when metric is set to 1.
Parameters: aPeakCenter (float) – peak center of the gaussian (a double)
-
setInputChannelAndWorkingArea(self, inputChannel: ORSModel.ors.Channel, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, currentT: int) → None¶ Sets the channel that will be used by theDijkstra algorithm to calculate distance.
Note
The min and max boundaries must not describe a space bigger than the input channel.
Parameters: - inputChannel (ORSModel.ors.Channel) – the input channel (an Channel)
- minX (int) – the minimum X index in the input channel (an unsigned short)
- minY (int) – the minimum Y index in the input channel (an unsigned short)
- minZ (int) – the minimum Z index in the input channel (an unsigned short)
- maxX (int) – the maximum X index in the input channel (an unsigned short)
- maxY (int) – the maximum Y index in the input channel (an unsigned short)
- maxZ (int) – the maximum Z index in the input channel (an unsigned short)
- currentT (int) –
-
setInputLabelsChannel(self, aInputLabelsChannel: ORSModel.ors.Channel) → None¶ Parameters: aInputLabelsChannel (ORSModel.ors.Channel) –
-
setInputMultiROI(self, aInputMultiROI: ORSModel.ors.MultiROI) → None¶ Parameters: aInputMultiROI (ORSModel.ors.MultiROI) –
-
setKappa(self, kappa: float) → None¶ Sets the kappa parameter for the metric == 1.
Note
Only useful when metric is set to 1.
Parameters: kappa (float) – the kappa parameter (an double)
-
setMaskROI(self, IMaskROI: ORSModel.ors.ROI) → None¶ Parameters: IMaskROI (ORSModel.ors.ROI) –
-
setMetric(self, metricType: int) → None¶ Selects the metric to be used by theDijkstra algorithm.
Note
If the metric chosen is 0, the metric function will be: DijkstraDistanceBetween(a,b) = (Ia-Ib)^2 + EuclideanBias*EuclideanDistance(a,b);
Note
If the metric chosen is 1, the metric function will be: DijkstraDistanceBetween(a,b) = (Ia-Ib)^2 + EuclideanBias*EuclideanDistance(a,b) + alpha(1.0 - exp(-(b-gaussianPeakCenterValue)^2/kappa*sigmaPow2)); where a and b are Neighbors, Ia and Ib are intensity at a and b
Parameters: metricType (int) – 0 or 1
-
setNeighborCountTo18(self) → None¶ Sets the number of neighbors used by theDijkstra algorithm to 6 ( Neighbor distance == 1).
-
setNeighborCountTo26(self) → None¶ Sets the number of neighbors used by theDijkstra algorithm to 6 ( Neighbor distance == 1).
-
setNeighborCountTo6(self) → None¶ Sets the number of neighbors used by theDijkstra algorithm to 6 ( Neighbor distance == 1).
-
setProgressObject(self, IProgress: ORSModel.ors.Progress) → None¶ Parameters: IProgress (ORSModel.ors.Progress) –
-
setROI(self, index: int, aVolROI: ORSModel.ors.ROI) → None¶ Fills a particularROI slot to be used as a source for the Dijkstra algorithm.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: - index (int) – the slot index (an unsigned char)
- aVolROI (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI)
-
setSigmaPow2(self, aLimit: float) → None¶ Sets the variance used by the gaussian used if the metric == 1.
Note
Only useful when metric is set to 1.
Parameters: aLimit (float) – variance of the gaussian (an double)
-
tracebackCPU(self, aROI: ORSModel.ors.ROI, linputChannelTraceBack: ORSModel.ors.Channel, aPath: ORSModel.ors.VisualPath) → None¶ Uses a traceback channel to fill a path from aROI to the nearest source ROI.
Parameters: - aROI (ORSModel.ors.ROI) – a trace back start (an ROI)
- linputChannelTraceBack (ORSModel.ors.Channel) – a trace back channel (an ROI)
- aPath (ORSModel.ors.VisualPath) –
-
updateDistanceMapForMaxDistance(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, maxDistance: float, lOutputChannelTraceBack: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel) → None¶ Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) –
- maxDistance (float) –
- lOutputChannelTraceBack (ORSModel.ors.Channel) –
- lOutputChannelLabel (ORSModel.ors.Channel) –
-
Dijkstra2D¶
-
class
ORSModel.ors.Dijkstra2D¶ Bases:
ORSModel.ors.Unmanaged-
cleanDistanceMapChannel(self, outputChannel: ORSModel.ors.Channel) → None¶ Removes boundaries or non reached value from a distance map channel.
Parameters: outputChannel (ORSModel.ors.Channel) – a distance map channel (an Channel)
-
createDistanceMap(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel) → None¶ Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) –
- lOutputChannelLabel (ORSModel.ors.Channel) –
-
createDistanceMapWithTraceBack(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel, traceBackChannel: ORSModel.ors.Channel) → None¶ Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) –
- lOutputChannelLabel (ORSModel.ors.Channel) –
- traceBackChannel (ORSModel.ors.Channel) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getEuclideanBias(self) → float¶ Get the Euclidean bias that will be the minimumDijkstra distance between voxels.
Note
Neighbors of distance 1 will have a bias of spacialTerm.
Note
Neighbors of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm.
Note
Neighbors of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm.
Returns: output (float) – the minimum distance between voxel (an double)
-
getNeighborCount(self) → int¶ Returns: output (int) –
-
getROICount(self) → int¶ Returns the number of ROIs that have been set as sources.
Note
A maximum of 10 ROI can be provided.
Returns: output (int) – the number of ROIs that have been provided (an char)
-
getVolumeROI(self, index: int) → ROI¶ Retrieves a particularROI from the index specified slot.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: index (int) – the slot index (an unsigned char) Returns: output (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI), or NULL if no ROI is at that slot
-
none()¶ Dijkstra2D.__init__() -> Dijkstra2D
-
resetVolumeROIs(self) → None¶ Empties all the sourceROI slots.
-
setEuclideanBias(self, EuclideanBias: float) → None¶ Provides an Euclidean bias that will be the minimumDijkstra distance between voxels.
Note
Neighbors of distance 1 will have a bias of spacialTerm.
Note
Neighbors of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm.
Note
Neighbors of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm.
Parameters: EuclideanBias (float) – the minimum distance between voxels (a double)
-
setInputChannelAndWorkingArea(self, inputChannel: ORSModel.ors.Channel, minX: int, minY: int, maxX: int, maxY: int, currentT: int) → None¶ Sets the channel that will be used by the 2DDijkstra algorithm to calculate distance.
Note
The min and max boundaries must not describe a space bigger than the input channel.
Parameters: - inputChannel (ORSModel.ors.Channel) – the input channel (an Channel)
- minX (int) – the minimum X index in the input channel (an integer)
- minY (int) – the minimum Y index in the input channel (an integer) TODO DOCUMENT_ME: Should this be removed?
- maxX (int) – the minimum Z index in the input channel (an unsigned short)
- maxY (int) – the maximum X index in the input channel (an integer)
- currentT (int) – the maximum Y index in the input channel (an integer) TODO DOCUMENT_ME
-
setNeighborCountTo4(self) → None¶ Sets the number of neighbors used by the 2DDijkstra algorithm to 4.
-
setNeighborCountTo8(self) → None¶ Sets the number of neighbors used by the 2DDijkstra algorithm to 8.
-
setVolumeROI(self, index: int, aVolROI: ORSModel.ors.ROI) → None¶ Fills a particularROI slot to be used as a source for the Dijkstra algorithm.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: - index (int) – the slot index (an unsigned char)
- aVolROI (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI)
-
traceback(self, traceBackChannel: ORSModel.ors.Channel, worldPosition: ORSModel.ors.Vector3, outArray: ORSModel.ors.Array) → Array¶ Parameters: - traceBackChannel (ORSModel.ors.Channel) –
- worldPosition (ORSModel.ors.Vector3) –
- outArray (ORSModel.ors.Array) –
Returns: output (ORSModel.ors.Array) –
-
DimensionUnit¶
-
class
ORSModel.ors.DimensionUnit¶ Bases:
ORSModel.ors.Managedbrief_description: An entity describing a unit of measure used by author: Eric Fournier. All other members of ORS participated. version: 1.0 date: august 2005 An entity describing a unit of measure used by the SDK. Units are predefined in the SDK.
-
convertToUnit(self, aVolume: float, anIDimensionUnit: ORSModel.ors.DimensionUnit) → float¶ Converts from a unit to another unit.
Parameters: - aVolume (float) –
- anIDimensionUnit (ORSModel.ors.DimensionUnit) –
Returns: output (float) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getDefault(self, dimensionType: int) → DimensionUnit¶ Gets the default system unit.
Parameters: dimensionType (int) – Returns: output (ORSModel.ors.DimensionUnit) – a DimensionUnit
-
getDimensionID(self) → int¶ Gets the unit dimension ID.
Note
See the CxvUniverse_Dimension enum in ORS_def.h to know the supported values.
Returns: output (int) – a CxvUniverse_Dimension
-
getDimensionType(self) → int¶ Returns a CxvUniverse_Dimension_Type describing the dimensionality of the dimension unit. 1: length; 2: surface; 3: volume; 4: angle.
Returns: output (int) –
-
getReferenceUnitConvertedToUnit(self, aVolume: float) → float¶ Converts from MKS to another unit.
Parameters: aVolume (float) – Returns: output (float) –
-
getReferenceUnitToUnitFactor(self) → float¶ Gets the unit factor.
Note
All factors are expressed in relation to 1 meter (the base unit).
Returns: output (float) – a multiplying factor (a double)
-
getTypeForID(self, pDimension: int) → int¶ Returns a CxvUniverse_Dimension_Type describing the dimensionality of the dimension type. 1: length; 2: surface; 3: volume; 4: angle.
Parameters: pDimension (int) – Returns: output (int) –
-
getUnitAbbreviation(self) → str¶ Gets the unit abbreviation.
Returns: output (str) –
-
getUnitConvertedToReferenceUnit(self, aVolume: float) → float¶ Converts to MKS from another unit.
Parameters: aVolume (float) – Returns: output (float) –
-
getUnitForID(self, pDimension: int) → DimensionUnit¶ Gets the unit for the specified index.
Note
See the CxvUniverse_Dimension enum in ORS_def.h to know the supported values.
Parameters: pDimension (int) – a dimension index (an int) Returns: output (ORSModel.ors.DimensionUnit) – a DimensionUnit
-
getUnitName(self) → str¶ Gets the unit name.
Returns: output (str) –
-
getUnitWithAbbreviation(self, sAbbreviation: str) → DimensionUnit¶ Gets the unit that has the specified abbreviation.
Parameters: sAbbreviation (str) – a text abbreviation (a string) Returns: output (ORSModel.ors.DimensionUnit) – a DimensionUnit or none
-
none()¶ DimensionUnit.__init__() -> DimensionUnit
-
DistanceChannelAnalyzer¶
-
class
ORSModel.ors.DistanceChannelAnalyzer¶ Bases:
ORSModel.ors.Unmanaged-
climbFromROI(self, lDistanceChannel: ORSModel.ors.Channel, inputROI: ORSModel.ors.ROI, outputROI: ORSModel.ors.ROI) → ROI¶ Parameters: - lDistanceChannel (ORSModel.ors.Channel) –
- inputROI (ORSModel.ors.ROI) –
- outputROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.ROI) –
-
descentPathTowardMinimum(self, lDistanceChannel: ORSModel.ors.Channel, inputROI: ORSModel.ors.ROI, InputPath: ORSModel.ors.VisualPath) → VisualPath¶ Parameters: - lDistanceChannel (ORSModel.ors.Channel) –
- inputROI (ORSModel.ors.ROI) –
- InputPath (ORSModel.ors.VisualPath) –
Returns: output (ORSModel.ors.VisualPath) –
-
descentTowardMinimum(self, lDistanceChannel: ORSModel.ors.Channel, inputROI: ORSModel.ors.ROI, outputROI: ORSModel.ors.ROI) → ROI¶ Parameters: - lDistanceChannel (ORSModel.ors.Channel) –
- inputROI (ORSModel.ors.ROI) –
- outputROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.ROI) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ DistanceChannelAnalyzer.__init__() -> DistanceChannelAnalyzer
-
DualQuaternion¶
-
class
ORSModel.ors.DualQuaternion¶ Bases:
ORSModel.ors.Unmanagedbrief_description: A wrapper to a author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: august 2018
-
add(self, aVector: ORSModel.ors.DualQuaternion) → None¶ Adds a vector to the receiver.
Parameters: aVector (ORSModel.ors.DualQuaternion) – a vector (an Vector3)
-
copy(self) → DualQuaternion¶ Returns a new vector identical to the receiver (a copy).
Returns: output (ORSModel.ors.DualQuaternion) –
-
createFromPythonRepresentation(aPythonRepresentation: str) → DualQuaternion¶ Create aUnmanaged Object from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.DualQuaternion) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getAdditionWith(self, aVector: ORSModel.ors.DualQuaternion) → DualQuaternion¶ Gets the result of adding a vector to the receiver.
Note
The receiver is not modified.
Parameters: aVector (ORSModel.ors.DualQuaternion) – a vector (an Vector3) Returns: output (ORSModel.ors.DualQuaternion) – the resulting vector (an Vector3)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getIsEqualTo(self, aVector: ORSModel.ors.DualQuaternion) → bool¶ Parameters: aVector (ORSModel.ors.DualQuaternion) – Returns: output (bool) –
-
getLinearInterpolationWith(self, point1: ORSModel.ors.DualQuaternion, normalizePosition: float) → DualQuaternion¶ Computes the lerp with another vector.
Parameters: - point1 (ORSModel.ors.DualQuaternion) – a vector (an Vector3)
- normalizePosition (float) – a interpolation factor [0,1](a double)
Returns: output (ORSModel.ors.DualQuaternion) – the lerp vector (an Vector3)
-
getNegated(self) → DualQuaternion¶ Gets the receiver negated in a new vector.
Note
The receiver is not modified.
Returns: output (ORSModel.ors.DualQuaternion) – the resulting vector (an Vector3)
-
getNormalized(self) → DualQuaternion¶ Returns: output (ORSModel.ors.DualQuaternion) –
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getScaledBy(self, scaleFactor: float) → DualQuaternion¶ Gets the result of sacling a vector to the receiver.
Note
The receiver is not modified.
Parameters: scaleFactor (float) – a scale a double Returns: output (ORSModel.ors.DualQuaternion) – the resulting vector (an Vector3)
-
getSphericalInterpolationWith(self, point1: ORSModel.ors.DualQuaternion, normalizePosition: float) → DualQuaternion¶ Computes the lerp with another vector.
Parameters: - point1 (ORSModel.ors.DualQuaternion) – a vector (an Vector3)
- normalizePosition (float) – a interpolation factor [0,1](a double)
Returns: output (ORSModel.ors.DualQuaternion) – the lerp vector (an Vector3)
-
getSubtractionFrom(self, aVector: ORSModel.ors.DualQuaternion) → DualQuaternion¶ Gets the result of subtracting a vector from the receiver.
Note
The receiver is not modified.
Parameters: aVector (ORSModel.ors.DualQuaternion) – a vector (an Vector3) Returns: output (ORSModel.ors.DualQuaternion) – the resulting vector (an Vector3)
-
negate(self) → None¶ Negates the vector.
-
none()¶ DualQuaternion.__init__() -> DualQuaternion
-
normalize(self) → None¶ Normalizes the vector.
Note
A normalized vector has norm (length) 1.
-
scale(self, scaleFactor: float) → None¶ Scales the vector.
Parameters: scaleFactor (float) – a scale factor (a double)
-
subtract(self, aVector: ORSModel.ors.DualQuaternion) → None¶ Subtracts a vector from the receiver.
Parameters: aVector (ORSModel.ors.DualQuaternion) – a vector (an Vector3)
-
EuclideanDistanceMapGenerator¶
-
class
ORSModel.ors.EuclideanDistanceMapGenerator¶ Bases:
ORSModel.ors.Unmanagedbrief_description: Exact euclidean distance map generator. author: N Piche All other members of ORS participated. version: 1.0 date: December 2015 Object used to generate euclidean distance map
-
createDistanceMap(self, seedChannel: ORSModel.ors.Channel, outputChannel: ORSModel.ors.Channel, timeStep: int, IProgress: ORSModel.ors.Progress, bShowProgress: bool) → Channel¶ Parameters: - seedChannel (ORSModel.ors.Channel) –
- outputChannel (ORSModel.ors.Channel) –
- timeStep (int) –
- IProgress (ORSModel.ors.Progress) –
- bShowProgress (bool) –
Returns: output (ORSModel.ors.Channel) –
-
createDistanceMapFromROI(self, seedVolumeROI: ORSModel.ors.ROI, outputChannel: ORSModel.ors.Channel, timeStep: int, IProgress: ORSModel.ors.Progress, bShowProgress: bool) → Channel¶ Parameters: - seedVolumeROI (ORSModel.ors.ROI) –
- outputChannel (ORSModel.ors.Channel) –
- timeStep (int) –
- IProgress (ORSModel.ors.Progress) –
- bShowProgress (bool) –
Returns: output (ORSModel.ors.Channel) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ EuclideanDistanceMapGenerator.__init__() -> EuclideanDistanceMapGenerator
-
FaceVertexMesh¶
-
class
ORSModel.ors.FaceVertexMesh¶ Bases:
ORSModel.ors.Mesh-
copyInto(self, aDestinationUnstructuredGrid: ORSModel.ors.Node) → None¶ Copies the receiver unstructured grid into another unstructured grid.
Parameters: aDestinationUnstructuredGrid (ORSModel.ors.Node) – a destination unstructured grid
-
getAsHalfEdgeModelCopy(self, pInOutMeshModel: ORSModel.ors.HalfEdgeMesh) → HalfEdgeMesh¶ Parameters: pInOutMeshModel (ORSModel.ors.HalfEdgeMesh) – Returns: output (ORSModel.ors.HalfEdgeMesh) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ FaceVertexMesh.__init__() -> FaceVertexMesh
-
FastMarching¶
-
class
ORSModel.ors.FastMarching¶ Bases:
ORSModel.ors.Unmanaged-
cleanSpeedMapChannel(self, outputChannel: ORSModel.ors.Channel) → None¶ Remove boundary or non reached value from a speed mapChannel.
Parameters: outputChannel (ORSModel.ors.Channel) – a distance map Channel (an Channel)
-
continueDistanceMapForNBIteration(self, lOutputChannelSpeedMap: ORSModel.ors.Channel, forNbIteration: int, autoUpdateROI: bool) → None¶ Parameters: - lOutputChannelSpeedMap (ORSModel.ors.Channel) –
- forNbIteration (int) –
- autoUpdateROI (bool) –
-
createDistanceMap(self, inChannelDistanceMap: ORSModel.ors.Channel, positionTripleInSourceRef: int, nbPosition: int, lMaskChannel: ORSModel.ors.Channel, traceBackChannel: ORSModel.ors.Channel) → Channel¶ Parameters: - inChannelDistanceMap (ORSModel.ors.Channel) –
- positionTripleInSourceRef (int) –
- nbPosition (int) –
- lMaskChannel (ORSModel.ors.Channel) –
- traceBackChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) –
-
createDistanceMapForNBIteration(self, lOutputChannelSpeedMap: ORSModel.ors.Channel, forNbIteration: int, autoUpdateROI: bool, lMaskChannel: ORSModel.ors.Channel) → None¶ Parameters: - lOutputChannelSpeedMap (ORSModel.ors.Channel) –
- forNbIteration (int) –
- autoUpdateROI (bool) –
- lMaskChannel (ORSModel.ors.Channel) –
-
createDistanceMapWithMask(self, inChannelDistanceMap: ORSModel.ors.Channel, lMaskChannel: ORSModel.ors.Channel) → Channel¶ Parameters: - inChannelDistanceMap (ORSModel.ors.Channel) –
- lMaskChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Channel) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getEuclideanBias(self) → float¶ get the Euclidean bias that will be the minimumDijkstra distance between voxels
Note
Neighbor of distance 1 will have a bias of spacialTerm
Note
Neighbor of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm
Note
Neighbor of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm
Returns: output (float) – the minimum distance between voxel (an double)
-
getForcedMeanValue(self) → float¶ Returns: output (float) –
-
getIndexOfStopPointReach(self) → int¶ Returns: output (int) –
-
getMaxValueToConsider(self) → float¶ Returns: output (float) –
-
getMinValueToConsider(self) → float¶ Returns: output (float) –
-
getROI(self, index: int) → ROI¶ Retrieves a particularROI from the index specified slot.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: index (int) – the slot index (an unsigned char) Returns: output (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI), or NULL if no ROI is at that slot
-
getROICount(self) → int¶ Returns the number of ROIs that have been set as sources.
Note
A maximum of 10 ROI can be provided.
Returns: output (int) – the number of ROIs that have been provided (an char)
-
getStopValue(self) → float¶ Returns: output (float) –
-
getStopWhenValueIsEncountered(self) → bool¶ Returns: output (bool) –
-
getUsedForcedMean(self) → bool¶ Returns: output (bool) –
-
none()¶ FastMarching.__init__() -> FastMarching
-
recomputeValueWindow(self, aVolumeROI: ORSModel.ors.ROI) → None¶ Parameters: aVolumeROI (ORSModel.ors.ROI) –
-
resetROIs(self) → None¶ Empties all the sourceROI slots.
-
setEuclideanBias(self, EuclideanBias: float) → None¶ Provides an Euclidean bias that will be the minimumDijkstra distance between voxels.
Note
Neighbors of distance 1 will have a bias of spacialTerm.
Note
Neighbors of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm.
Note
Neighbors of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm.
Parameters: EuclideanBias (float) – the minimum distance between voxels (a double)
-
setForcedMeanValue(self, aVal: float) → None¶ Parameters: aVal (float) –
-
setInputChannelAndWorkingArea(self, inputChannel: ORSModel.ors.Channel, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, currentT: int) → None¶ Sets the channel that will be used by theFastMarching algorithm to calculate distance.
Note
The min and max boundaries must not describe a space bigger than the input channel.
Parameters: - inputChannel (ORSModel.ors.Channel) – the input channel (an Channel)
- minX (int) – the minimum X index in the input channel (an integer)
- minY (int) – the minimum Y index in the input channel (an integer) TODO DOCUMENT_ME: Should this be removed?
- minZ (int) – the minimum Z index in the input channel (an unsigned short)
- maxX (int) – the maximum X index in the input channel (an integer)
- maxY (int) – the maximum Y index in the input channel (an integer) TODO DOCUMENT_ME
- maxZ (int) – the maximum Z index in the input channel (an unsigned short)
- currentT (int) – the current time point (an unsigned short)
-
setMaxValueToConsider(self, maxValue: float) → None¶ Parameters: maxValue (float) –
-
setMinValueToConsider(self, minValue: float) → None¶ Parameters: minValue (float) –
-
setROI(self, index: int, aVolROI: ORSModel.ors.ROI) → None¶ Fills a particularROI slot to be used as a source for the Dijkstra algorithm.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: - index (int) – the slot index (an unsigned char)
- aVolROI (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI)
-
setStopPosition(self, xP: int, yP: int, zP: int) → None¶ Parameters: - xP (int) –
- yP (int) –
- zP (int) –
-
setStopValue(self, stopValue: float) → None¶ Parameters: stopValue (float) –
-
setStopWhenValueIsEncountered(self, aF: bool) → None¶ Parameters: aF (bool) –
-
setUseValueWindow(self, aF: bool) → None¶ Parameters: aF (bool) –
-
setUsedForcedMean(self, aF: bool) → None¶ Parameters: aF (bool) –
-
useDijkstraMetric(self, aF: bool) → None¶ Parameters: aF (bool) –
-
FastMarching2D¶
-
class
ORSModel.ors.FastMarching2D¶ Bases:
ORSModel.ors.Unmanagedauthor: Benjamin Provencher. All other members of ORS participated. version: 1.0 date: June 2010
-
cleanSpeedMapChannel(self, outputChannel: ORSModel.ors.Channel) → None¶ Removes boundaries or non reached values from a speed map channel.
Parameters: outputChannel (ORSModel.ors.Channel) – a distance map channel (an Channel)
-
createDistanceMap(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, lMaskChannel: ORSModel.ors.Channel) → None¶ Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) –
- lMaskChannel (ORSModel.ors.Channel) –
-
createDistanceMapForNBIteration(self, lOutputChannelSpeedMap: ORSModel.ors.Channel, forNbIteration: int, autoUpdateROI: bool, lMaskChannel: ORSModel.ors.Channel) → None¶ Parameters: - lOutputChannelSpeedMap (ORSModel.ors.Channel) –
- forNbIteration (int) –
- autoUpdateROI (bool) –
- lMaskChannel (ORSModel.ors.Channel) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMeanValue(self) → float¶ get the mean value used in the setian metric
Returns: output (float) – float a normalized value
-
getROICount(self) → int¶ Returns the number of ROIs that have been set as sources.
Note
A maximum of 10 ROI can be provided.
Returns: output (int) – the number of ROIs that have been provided (an char)
-
getVolumeROI(self, index: int) → ROI¶ Retrieves a particularROI from the index specified slot.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: index (int) – the slot index (an unsigned char) Returns: output (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI), or NULL if no ROI is at that slot
-
none()¶ FastMarching2D.__init__() -> FastMarching2D
-
resetVolumeROIs(self) → None¶ Empties all the sourceROI slots.
-
setEuclideanBias(self, EuclideanBias: float) → None¶ Provides an Euclidean bias that will be the minimumDijkstra distance between voxels.
Note
Neighbors of distance 1 will have a bias of spacialTerm.
Note
Neighbors of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm.
Note
Neighbors of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm.
Parameters: EuclideanBias (float) – the minimum distance between voxels (a float)
-
setInputChannelAndWorkingArea(self, inputChannel: ORSModel.ors.Channel, minX: int, minY: int, maxX: int, maxY: int, currentT: int) → None¶ Sets the channel that will be used by the 2DFastMarching algorithm to calculate distance.
Note
The min and max boundaries must not describe a space bigger than the input channel.
Parameters: - inputChannel (ORSModel.ors.Channel) – the input channel (an Channel)
- minX (int) – the minimum X index in the input channel (an unsigned short)
- minY (int) – the minimum Y index in the input channel (an unsigned short)
- maxX (int) – the minimum Z index in the input channel (an unsigned short)
- maxY (int) – the maximum X index in the input channel (an unsigned short)
- currentT (int) – the maximum Y index in the input channel (an unsigned short)
-
setMeanValue(self, mean: float) → None¶ Set the mean value used in the setian metric.
Parameters: mean (float) – float a normalized value
-
setVolumeROI(self, index: int, aVolROI: ORSModel.ors.ROI) → None¶ Fills a particularROI slot to be used as a source for the Dijkstra algorithm.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: - index (int) – the slot index (an unsigned char)
- aVolROI (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI)
-
useDijkstraMetric(self, pFlag: bool) → None¶ Parameters: pFlag (bool) –
-
FastMarchingWatershed2D¶
-
class
ORSModel.ors.FastMarchingWatershed2D¶ Bases:
ORSModel.ors.FastMarching2Dauthor: Nicolas Piché. All other members of ORS participated. version: 1.0 date: July 2010
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getGradMinimumSearchRange(self) → int¶ Returns: output (int) –
-
none()¶ FastMarchingWatershed2D.__init__() -> FastMarchingWatershed2D
-
setGradChannel(self, gradChannel: ORSModel.ors.Channel) → None¶ Parameters: gradChannel (ORSModel.ors.Channel) –
-
setGradMinimumSearchRange(self, range: int) → None¶ Parameters: range (int) –
-
setLabelChannel(self, labelChannel: ORSModel.ors.Channel) → None¶ Parameters: labelChannel (ORSModel.ors.Channel) –
-
FordBellmanAutomata¶
-
class
ORSModel.ors.FordBellmanAutomata¶ Bases:
ORSModel.ors.Unmanaged-
cleanDistanceMapChannel(self, outputChannel: ORSModel.ors.Channel) → None¶ Remove boundary or non reached value from a distance mapChannel.
Parameters: outputChannel (ORSModel.ors.Channel) – a distance map Channel (an Channel)
-
createDistanceMap(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, lOutputChannelTraceBack: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel, nbIteration: int) → None¶ Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) –
- lOutputChannelTraceBack (ORSModel.ors.Channel) –
- lOutputChannelLabel (ORSModel.ors.Channel) –
- nbIteration (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getEuclideanBias(self) → float¶ get the Euclidean bias that will be the minimumDijkstra distance between voxels
Note
Neighbor of distance 1 will have a bias of spacialTerm
Note
Neighbor of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm
Note
Neighbor of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm
Returns: output (float) – the minimum distance between voxel (an float)
-
getMetric(self) → int¶ Returns: output (int) –
-
getNeighborCount(self) → int¶ Returns: output (int) –
-
getROI(self, index: int) → ROI¶ Retrieves a particularROI from the index specified slot.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: index (int) – the slot index (an unsigned char) Returns: output (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI), or NULL if no ROI is at that slot
-
getROICount(self) → int¶ Returns the number of ROIs that have been set as sources.
Note
A maximum of 10 ROI can be provided.
Returns: output (int) – the number of ROIs that have been provided (an char)
-
none()¶ FordBellmanAutomata.__init__() -> FordBellmanAutomata
-
resetVolumeROIs(self) → None¶ Empties all the sourceROI slots.
-
setEuclideanBias(self, EuclideanBias: float) → None¶ Provides an Euclidean bias that will be the minimumDijkstra distance between voxels.
Note
Neighbors of distance 1 will have a bias of spacialTerm.
Note
Neighbors of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm.
Note
Neighbors of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm.
Parameters: EuclideanBias (float) – the minimum distance between voxels (a float)
-
setInputChannelAndWorkingArea(self, inputChannel: ORSModel.ors.Channel, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, currentT: int) → None¶ Sets the channel that will be used by the FordBellman algorithm to calculate distance.
Note
The min and max boundaries must not describe a space bigger than the input channel.
Parameters: - inputChannel (ORSModel.ors.Channel) – the input channel (an Channel)
- minX (int) – the minimum X index in the input channel (an unsigned short)
- minY (int) – the minimum Y index in the input channel (an unsigned short)
- minZ (int) – the minimum Z index in the input channel (an unsigned short)
- maxX (int) – the maximum X index in the input channel (an unsigned short)
- maxY (int) – the maximum Y index in the input channel (an unsigned short)
- maxZ (int) – the maximum Z index in the input channel (an unsigned short)
- currentT (int) –
-
setMetric(self, metricType: int) → None¶ Parameters: metricType (int) –
-
setNeighborCountTo18(self) → None¶
-
setNeighborCountTo26(self) → None¶
-
setNeighborCountTo6(self) → None¶
-
setVolumeROI(self, index: int, aVolROI: ORSModel.ors.ROI) → None¶ Fills a particularROI slot to be used as a source for the Dijkstra algorithm.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: - index (int) – the slot index (an int)
- aVolROI (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI)
-
GaussianPyramid¶
-
class
ORSModel.ors.GaussianPyramid¶ Bases:
ORSModel.ors.Unmanaged-
createGaussianPyramid(self, pIOutChannelsGaussianPyramid: ORSModel.ors.Channel, pNumberOfLevels: int) → None¶ Parameters: - pIOutChannelsGaussianPyramid (ORSModel.ors.Channel) –
- pNumberOfLevels (int) –
-
getChannelBase(self) → Channel¶ Returns: output (ORSModel.ors.Channel) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getGaussianPyramid(self, firstLevelChannel: ORSModel.ors.Channel, secondLevelChannel: ORSModel.ors.Channel, thirdLevelChannel: ORSModel.ors.Channel, fourthLevelChannel: ORSModel.ors.Channel) → None¶ Parameters: - firstLevelChannel (ORSModel.ors.Channel) –
- secondLevelChannel (ORSModel.ors.Channel) –
- thirdLevelChannel (ORSModel.ors.Channel) –
- fourthLevelChannel (ORSModel.ors.Channel) –
-
getHalfsizeKernel(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
getMaxLevelGaussianPyramid(self) → int¶ Returns: output (int) –
-
getMinLevelGaussianPyramid(self) → int¶ Returns: output (int) –
-
getOriginSubsetPixels(self, x: int, y: int, z: int, t: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
- t (int) –
-
getPerformZReduction(self) → bool¶ Returns: output (bool) –
-
getSigma(self) → float¶ Returns: output (float) –
-
getSizeSubsetPixels(self, x: int, y: int, z: int, t: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
- t (int) –
-
none()¶ GaussianPyramid.__init__() -> GaussianPyramid
-
setChannelBase(self, pIInputChannel: ORSModel.ors.Channel) → None¶ Parameters: pIInputChannel (ORSModel.ors.Channel) –
-
setHalfsizeKernel(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
setLevelsGaussianPyramid(self, minLevel: int, maxLevel: int) → None¶ Parameters: - minLevel (int) –
- maxLevel (int) –
-
setOriginSubsetPixels(self, x: int, y: int, z: int, t: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
- t (int) –
-
setPerformZReduction(self, bValue: bool) → None¶ Parameters: bValue (bool) –
-
setSigma(self, value: float) → None¶ Parameters: value (float) –
-
setSizeSubsetPixels(self, x: int, y: int, z: int, t: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
- t (int) –
-
GeodesicDistanceMap¶
-
class
ORSModel.ors.GeodesicDistanceMap¶ Bases:
ORSModel.ors.Unmanaged-
createDistanceMap(maskROI: ORSModel.ors.ROI, seedROI: ORSModel.ors.ROI) → Channel¶ Parameters: - maskROI (ORSModel.ors.ROI) –
- seedROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.Channel) –
-
Graph¶
-
class
ORSModel.ors.Graph¶ Bases:
ORSModel.ors.UnstructuredGrid-
addSlot(self, iTIndex: int, aChannel: ORSModel.ors.Channel, toAddSlotToVertices: bool, toAddSlotToEdges: bool, aProgress: ORSModel.ors.Progress) → None¶ Parameters: - iTIndex (int) –
- aChannel (ORSModel.ors.Channel) –
- toAddSlotToVertices (bool) –
- toAddSlotToEdges (bool) –
- aProgress (ORSModel.ors.Progress) –
-
findNeighbours(self, iTIndex: int) → ArrayUnsignedLong¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayUnsignedLong) –
-
getAnglesCount(self, iTIndex: int) → int¶ Parameters: iTIndex (int) – Returns: output (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCurrentEdgeScalarValuesSlot(self) → int¶ gets the current face scalar.
Note
The scalar index is zero-based, and thus should be less than getEdgeScalarValuesSlotCount().
Returns: output (int) – the scalar slot index (an short)
-
getDefaultEdgeAlphaColor(self) → float¶ Queries the Edge to get its default alpha color.
Returns: output (float) – Default alpha color used for the edge (a double)
-
getDefaultEdgeColor(self) → Color¶ Gets the edge default color.
Note
Each color value goes between 0 (none) and 1 (full).
Returns: output (ORSModel.ors.Color) – a color (an Color)
-
getEdgeCount(self, iTIndex: int) → int¶ Returns the number of edges.
Parameters: iTIndex (int) – the the time step (a uint32_t) Returns: output (int) – an uint64_t
-
getEdgeScalarValue(self, nScalarValueSlotIndex: int, scalarValueEdgeIndex: int, iTIndex: int) → float¶ Gets the value of a face scalar.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- scalarValueEdgeIndex (int) – the face index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the value of a face scalar (a double)
-
getEdgeScalarValueDescription(self, nScalarValueSlotIndex: int, iTIndex: int) → str¶ Gets a face scalar description.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (str) – the description (a std::wstring)
-
getEdgeScalarValueMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ method getEdgeScalarValueMax
Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (float) –
-
getEdgeScalarValueMaxs(self, iTIndex: int) → ArrayDouble¶ method getEdgeScalarValueMaxs
Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getEdgeScalarValueMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a face scalar min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getEdgeScalarValueMins(self, iTIndex: int) → ArrayDouble¶ method getEdgeScalarValueMins
Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getEdgeScalarValueOffset(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a face scalar offset value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar offset value (a double)
-
getEdgeScalarValueOffsets(self, iTIndex: int) → ArrayDouble¶ Get the face scalar offset values.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayDouble) – the scalar offset values (an ArrayDouble)
-
getEdgeScalarValueSlope(self, scalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a face scalar slope value.
Parameters: - scalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar slope value (a double)
-
getEdgeScalarValueSlopes(self, iTIndex: int) → ArrayDouble¶ Get the face scalar slope values.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayDouble) – the scalar slope values (an ArrayDouble)
-
getEdgeScalarValueSlotLookUpTable(self, nScalarValueSlotIndex: int, iTIndex: int) → dict¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (dict) –
-
getEdgeScalarValueUnit(self, nScalarValueSlotIndex: int, iTIndex: int) → int¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (int) –
-
getEdgeScalarValues(self, nScalarValueSlotIndex: int, iTIndex: int) → Array¶ Gets the values of a face scalar.
Note
The array of values is of length getEdgeCount() * getEdgeScalarValuesSlotCount().
Note
The scalar value in the slot s of the face v is located at the index (getEdgeScalarValuesSlotCount() * v) + s of the array.
Parameters: - nScalarValueSlotIndex (int) – the face scalar value slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (ORSModel.ors.Array) – an array of values (an ArrayFloat)
-
getEdgeScalarValuesDatatype(self, nScalarValueSlotIndex: int, iTIndex: int) → int¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (int) –
-
getEdgeScalarValuesRangeBoundaryMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a face scalar range max boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getEdgeScalarValuesRangeBoundaryMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a face scalar range min boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getEdgeScalarValuesRangeMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a face scalar range max value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getEdgeScalarValuesRangeMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a face scalar range min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getEdgeScalarValuesSlotCount(self) → int¶ Gets the number of slots for face scalar values.
Returns: output (int) – the number of slots (an short)
-
getEdgeScalarValuesWindowMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (float) –
-
getEdgeScalarValuesWindowMaxs(self, iTIndex: int) → ArrayDouble¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getEdgeScalarValuesWindowMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a face scalar window min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getEdgeScalarValuesWindowMins(self, iTIndex: int) → ArrayDouble¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getEdges(self, iTIndex: int) → ArrayUnsignedLong¶ Get the edge array.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayUnsignedLong) – an array of int32_t (an ArrayLong)
-
getHideOutOfRangeEdgeScalarValues(self) → bool¶ Indicate if out of range values should be hiden.
Returns: output (bool) – (a bool)
-
getMinMaxEdgeScalarValue(self, nScalarValueSlotIndex: int, iTIndex: int, fMinValue: float, fMaxValue: float) → None¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
- fMinValue (float) –
- fMaxValue (float) –
-
getNumVertices(self, iTIndex: int) → int¶ Parameters: iTIndex (int) – Returns: output (int) –
-
getUnstructuredGridHelperClass()¶
-
getUseDefaultEdgeAlphaColor(self) → bool¶ Queries the edge to see if it uses its default alpha color.
Returns: output (bool) – TRUE if a default alpha color is used for the edge, FALSE otherwise
-
getUseDefaultEdgeColor(self) → bool¶ Queries the edge to see if it uses its default color.
Returns: output (bool) – TRUE if the edge uses its default color, FALSE otherwise
-
getUseEdgeScalarValues(self) → bool¶ Sets the edge to have face scalar values or not.
Returns: output (bool) – TRUE to use scalar values, FALSE otherwise
-
getVerticesWithConnectivity(self, iTIndex: int, NumOfNeighbours: int) → ArrayUnsignedLong¶ Parameters: - iTIndex (int) –
- NumOfNeighbours (int) –
Returns: output (ORSModel.ors.ArrayUnsignedLong) –
-
interTrabecularAngle(self, iTIndex: int, NumOutEdges: int, arrayAngles: ORSModel.ors.ArrayDouble, arrayFirstEdgeOfAngles: ORSModel.ors.ArrayUnsignedLong, arraySecondEdgeOfAngles: ORSModel.ors.ArrayUnsignedLong, arrayVertexOfAngles: ORSModel.ors.ArrayUnsignedLong) → None¶ Parameters: - iTIndex (int) –
- NumOutEdges (int) –
- arrayAngles (ORSModel.ors.ArrayDouble) –
- arrayFirstEdgeOfAngles (ORSModel.ors.ArrayUnsignedLong) –
- arraySecondEdgeOfAngles (ORSModel.ors.ArrayUnsignedLong) –
- arrayVertexOfAngles (ORSModel.ors.ArrayUnsignedLong) –
-
isIndexInArray(self, iTIndex: int, index: int, array: ORSModel.ors.ArrayUnsignedLong) → bool¶ Parameters: - iTIndex (int) –
- index (int) –
- array (ORSModel.ors.ArrayUnsignedLong) –
Returns: output (bool) –
-
mergeVertices(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
nodeAbundance(self, iTIndex: int) → ArrayDouble¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
none() → Graph¶ Returns a none object, equivalent to a non-existent object (or null).
Returns: output (Graph) –
-
removeAnEdgeScalarValuesSlot(self, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Remove an edge scalar slot.
Parameters: - nScalarValueSlotIndex (int) – the index of the slot to be removed (a uint32_t)
- iTIndex (int) – the time step (a uint32_t)
-
removeDeadEnds(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
removeDuplicateEdges(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
removeIsolatedEdges(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
removeIsolatedVertices(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
reverseEdges(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
setCurrentEdgeScalarValuesSlot(self, slotIndex: int) → None¶ Sets the current face scalar.
Note
The scalar index is zero-based, and thus should be less than getEdgeScalarValuesSlotCount().
Parameters: slotIndex (int) – the current scalar slot index (an unsigned short)
-
setDefaultEdgeAlphaColor(self, value: float) → None¶ Sets the edge its default alpha color.
Parameters: value (float) – Alpha color (double)
-
setDefaultEdgeColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the edge default color.
Note
Each color value goes between 0 (none) and 1 (full).
Note
You need to call setUseDefaultColor(TRUE) for the default color to be used.
Note
You need to call initializeVisual after color changes for them to be visible on the screen.
Parameters: IColor (ORSModel.ors.Color) – a color (an Color)
-
setEdgeScalarValue(self, nScalarValueSlotIndex: int, scalarValueEdgeIndex: int, aValue: float, iTIndex: int) → None¶ Sets the value of a face scalar.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- scalarValueEdgeIndex (int) – the face index (an uint32_t)
- aValue (float) – the value of a face scalar to set (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setEdgeScalarValueDescription(self, nScalarValueSlotIndex: int, value: str, iTIndex: int) → None¶ Parameters: - nScalarValueSlotIndex (int) –
- value (str) –
- iTIndex (int) –
-
setEdgeScalarValueMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a face scalar max value.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (an unsigned short)
- value (float) – scalar max value (a double)
- iTIndex (int) – time step (a uint32_t)
-
setEdgeScalarValueMaxs(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ method setEdgeScalarValueMaxs
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setEdgeScalarValueMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ method setEdgeScalarValueMin
Parameters: - nScalarValueSlotIndex (int) – the slot index (a unsigned short)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setEdgeScalarValueMins(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ method setEdgeScalarValueMins
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setEdgeScalarValueOffset(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a face scalar offset value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- value (float) – the scalar offset value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setEdgeScalarValueOffsets(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Set the face scalar offset values.
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) – scalar offset values (an ArrayDouble)
- iTIndex (int) – time step (a uint32_t)
-
setEdgeScalarValueSlope(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Gets a face scalar slope value.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (an unsigned short)
- value (float) – scalar slope value (a double)
- iTIndex (int) – time step (a uint32_t)
-
setEdgeScalarValueSlopes(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Set the face scalar slope values.
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) – scalar slope values (an ArrayDouble)
- iTIndex (int) – time step (a uint32_t)
-
setEdgeScalarValueSlotLookUpTable(self, lookUpTable: dict, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Parameters: - lookUpTable (dict) –
- nScalarValueSlotIndex (int) –
- iTIndex (int) –
-
setEdgeScalarValueUnit(self, nScalarValueSlotIndex: int, value: int, iTIndex: int) → None¶ Parameters: - nScalarValueSlotIndex (int) –
- value (int) –
- iTIndex (int) –
-
setEdgeScalarValues(self, pScalarValues: ORSModel.ors.Array, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Sets the values of a face scalar.
Note
The array of values is of length getEdgeCount() * getEdgeScalarValuesSlotCount().
Note
The scalar value in the slot s of the face v is located at the index (getEdgeScalarValuesSlotCount() * v) + s of the array.
Parameters: - pScalarValues (ORSModel.ors.Array) – an array of values (an ArrayFloat)
- nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- iTIndex (int) – the time step (a uint32_t)
-
setEdgeScalarValuesDatatype(self, iSlotIndex: int, iTIndex: int, nEdgeScalarValuesDatatype: int) → None¶ Parameters: - iSlotIndex (int) –
- iTIndex (int) –
- nEdgeScalarValuesDatatype (int) –
-
setEdgeScalarValuesRangeBoundaryMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a face scalar range max boundary value.
Parameters: - nScalarValueSlotIndex (int) – the slot index (a unsigned short)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setEdgeScalarValuesRangeBoundaryMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a face scalar range min boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setEdgeScalarValuesRangeMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a face scalar range max value.
Parameters: - nScalarValueSlotIndex (int) – the slot index (a unsigned short)
- value (float) – the value (a double)
- iTIndex (int) – the time step(a unsigned short)
-
setEdgeScalarValuesRangeMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a face scalar range min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (an unsigned short)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setEdgeScalarValuesSlotCount(self, value: int) → None¶ Sets the number of slots for face scalar values.
Parameters: value (int) – the number of slots (an unsigned short)
-
setEdgeScalarValuesWindowMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a face scalar max value.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (an unsigned short)
- value (float) – scalar max value (a double)
- iTIndex (int) – time step (a uint32_t)
-
setEdgeScalarValuesWindowMaxs(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setEdgeScalarValuesWindowMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ method setEdgeScalarValuesWindowMin
Parameters: - nScalarValueSlotIndex (int) – the slot index (a unsigned short)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setEdgeScalarValuesWindowMins(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setEdges(self, pEdges: ORSModel.ors.ArrayUnsignedLong, iTIndex: int) → None¶ Sets the edges.
Parameters: - pEdges (ORSModel.ors.ArrayUnsignedLong) – the edges(an ArrayUnsignedLong)
- iTIndex (int) – the time step (a uint32_t)
-
setHideOutOfRangeEdgeScalarValues(self, value: bool) → None¶ Indicate if out of range values should be hiden.
Parameters: value (bool) –
-
setUseDefaultEdgeAlphaColor(self, value: bool) → None¶ Sets the edge to use its default alpha color.
Parameters: value (bool) – TRUE for using a default alpha color for the edge, FALSE otherwise (bool)
-
setUseDefaultEdgeColor(self, value: bool) → None¶ Sets the edge to use its default color.
Parameters: value (bool) – TRUE to use the edge default color, FALSE otherwise
-
setUseEdgeScalarValues(self, value: bool) → None¶ Gets the status of face scalar values usage.
Parameters: value (bool) –
-
Group¶
-
class
ORSModel.ors.Group¶ Bases:
ORSModel.ors.Node-
add(self, pObject: ORSModel.ors.Managed) → None¶ Adds an object to the group.
Note
This container behaves like a set, i.e. objects can only appear once.
Parameters: pObject (ORSModel.ors.Managed) – object to add (an Object)
-
addAll(self, IInputGroup: ORSModel.ors.Group) → None¶ Appends the objects found in the supplied group to the group.
Note
This container behaves like a set, i.e. objects can only appear once.
Parameters: IInputGroup (ORSModel.ors.Group) – another group (an Group)
-
empty(self) → None¶ Empties the group.
-
getAllContainedInstancesOf(self, pProgId: str) → List¶ Returns all the objects of the supplied class found in the group.
Parameters: pProgId (str) – a class name (a string) Returns: output (ORSModel.ors.List) – a list of objects (an List)
-
getAllContainedObjectsOfClassAndPrivateTitle(self, pProgId: str, pPrivateTitle: str) → List¶ Returns all the objects of the supplied class and private title found in the group.
Parameters: - pProgId (str) – a class name (a string)
- pPrivateTitle (str) – a private title (a string)
Returns: output (ORSModel.ors.List) – a list of objects (an List)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCount(self) → int¶ Returns the count of objects in the group.
Returns: output (int) – object count (a uint32_t)
-
getIncludes(self, pObject: ORSModel.ors.Managed) → bool¶ Checks to see if an object is in the group.
Parameters: pObject (ORSModel.ors.Managed) – object to check (an Object) Returns: output (bool) – TRUE if object is in the group, FALSE otherwise
-
getIndexOf(self, pObject: ORSModel.ors.Managed) → int¶ Returns the index of the supplied object in the group.
Parameters: pObject (ORSModel.ors.Managed) – an object (an Object) Returns: output (int) – an index (an int), or -1 if the object is not in the group
-
getIntersectionWith(self, IInputGroup: ORSModel.ors.Group, IInOutGroup: ORSModel.ors.Group) → Group¶ Intersects the group with another group.
Note
If a target group is supplied, data is written to it and returned, otherwise a new group is created.
Note
The output group can be the same as the receiver group (i.e. can intersect with another group into itself).
Parameters: - IInputGroup (ORSModel.ors.Group) – the group to intersect with (an Group)
- IInOutGroup (ORSModel.ors.Group) – the output group (an Group), see note below
Returns: output (ORSModel.ors.Group) – the intersected group
-
getObjectAt(self, pos: int) → Managed¶ Returns the Nth object in the group.
Parameters: pos (int) – an index (a uint32_t) Returns: output (ORSModel.ors.Managed) – an object (an Object)
-
getSubtractionFrom(self, IInputGroup: ORSModel.ors.Group, IInOutGroup: ORSModel.ors.Group) → Group¶ Subtracts another group from the group.
Note
If a target group is supplied, data is written to it and returned, otherwise a new group is created.
Note
The output group can be the same as the receiver group (i.e. can subtract another group into itself), but the output group cannot be the subtraction group.
Parameters: - IInputGroup (ORSModel.ors.Group) – the group to subtract (an Group)
- IInOutGroup (ORSModel.ors.Group) – the output group (an Group), see note below
Returns: output (ORSModel.ors.Group) – the subtracted group
-
getUnionWith(self, IInputGroup: ORSModel.ors.Group, IInOutGroup: ORSModel.ors.Group) → Group¶ Merges the group with another group.
Note
This container behaves like a set, i.e. objects can only appear once.
Note
If a target group is supplied, data is written to it and returned, otherwise a new group is created.
Note
The output group can be the same as the receiver group (i.e. can merge with another group into itself).
Parameters: - IInputGroup (ORSModel.ors.Group) – the group to merge with (an Group)
- IInOutGroup (ORSModel.ors.Group) – the output group (an Group), see note below
Returns: output (ORSModel.ors.Group) – the merged group
-
none()¶ Group.__init__() -> Group
-
remove(self, pObject: ORSModel.ors.Managed) → None¶ Removes an object from the group.
Parameters: pObject (ORSModel.ors.Managed) – object to remove (an Object)
-
removeAll(self, IInputGroup: ORSModel.ors.Group) → None¶ Removes all the objects found in the supplied group from the group.
Note
This container behaves like a set, i.e. objects can only appear once.
Parameters: IInputGroup (ORSModel.ors.Group) – another group (an Group)
-
HalfEdgeMesh¶
-
class
ORSModel.ors.HalfEdgeMesh¶ Bases:
ORSModel.ors.Mesh-
copyInto(self, aDestinationUnstructuredGrid: ORSModel.ors.Node) → None¶ Copies the receiver unstructured grid into another unstructured grid.
Parameters: aDestinationUnstructuredGrid (ORSModel.ors.Node) – a destination unstructured grid
-
getAsFaceVertexModelCopy(self, pInOutMeshModel: ORSModel.ors.FaceVertexMesh) → FaceVertexMesh¶ Parameters: pInOutMeshModel (ORSModel.ors.FaceVertexMesh) – Returns: output (ORSModel.ors.FaceVertexMesh) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getEdgesInFaceVertexTopology(self, iTIndex: int) → ArrayUnsignedLong¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayUnsignedLong) –
-
getFacesAdjacencyArray(self, iTIndex: int) → ArrayUnsignedLong¶ Get the Faces Adjacent EdgeArray, containning, for each face f, the index e of an adjacent edge (i.e. pFaceAdjacentEdges->at(faceIdx) == edgeIdx)
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayUnsignedLong) – an array of int32_t (an ArrayLong)
-
getVerticesAdjacencyArray(self, iTIndex: int) → ArrayUnsignedLong¶ Get the Vertices Outgoing EdgeArray, containning, for each vertex v, the index e of a edge outgoing from v (i.e. pVerticesOutgoingEdges->at(vertexIdx) == outgoingEdgeIdx)
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayUnsignedLong) – an array of int32_t (an ArrayLong)
-
none()¶ HalfEdgeMesh.__init__() -> HalfEdgeMesh
-
setEdgesInFaceVertexTopology(self, pEdges: ORSModel.ors.ArrayUnsignedLong, iTIndex: int) → None¶ Parameters: - pEdges (ORSModel.ors.ArrayUnsignedLong) –
- iTIndex (int) –
-
HistogramAnalyzer¶
-
class
ORSModel.ors.HistogramAnalyzer¶ Bases:
ORSModel.ors.Unmanaged-
fillHistogram1DFromChannel(self, IHistogramData: ORSModel.ors.HistogramData, IChannel1: ORSModel.ors.Channel, tChannel: int, IROI: ORSModel.ors.ROI, tROI: int) → None¶ Fill a 1D histogram from the channel values, over the voxels specified by theROI.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the 1D histogram to fill (an HistogramData)
- IChannel1 (ORSModel.ors.Channel) – the channel (an Channel)
- tChannel (int) – the t index of the channel (an unsigned int)
- IROI (ORSModel.ors.ROI) – the ROI specifying what channel voxels to include (an ROI). If this parameter is given as nullptr, all channel voxels will be used.
- tROI (int) – the t index of the ROI (an unsigned int)
-
fillHistogram1DFromChannelSubset(self, IHistogramData: ORSModel.ors.HistogramData, IChannel1: ORSModel.ors.Channel, tChannel: int, xmin: int, ymin: int, zmin: int, xmax: int, ymax: int, zmax: int) → None¶ Fill a 1D histogram from the channel values, over a subset of the volume.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the 1D histogram to fill (an HistogramData)
- IChannel1 (ORSModel.ors.Channel) – the channel (an Channel)
- tChannel (int) – the t index of the channel (an unsigned int)
- xmin (int) – the minimal x index of the channel to use (an unsigned int)
- ymin (int) – the minimal y index of the channel to use (an unsigned int)
- zmin (int) – the minimal z index of the channel to use (an unsigned int)
- xmax (int) – the maximal x index of the channel to use (an unsigned int)
- ymax (int) – the maximal y index of the channel to use (an unsigned int)
- zmax (int) – the maximal z index of the channel to use (an unsigned int)
-
fillHistogram1DFromCollection(self, IHistogramData: ORSModel.ors.HistogramData, ICollection1: ORSModel.ors.SequenceableCollection, IFilterCollection: ORSModel.ors.SequenceableCollection, IArrayBinIndexes: ORSModel.ors.ArrayUnsignedLONGLONG) → None¶ Fill a 1D histogram from the collection values, over the elements specified by the filter collection.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the 1D histogram to fill (an HistogramData)
- ICollection1 (ORSModel.ors.SequenceableCollection) – the collection values (a SequenceableCollection)
- IFilterCollection (ORSModel.ors.SequenceableCollection) – the filter collection (a SequenceableCollection). If this parameter is given as nullptr, all elements of the collection values will be used.
- IArrayBinIndexes (ArrayUnsignedLONGLONG) – an array filled with the bin index of each element. If this parameter is given as nullptr, these indexes won’t be returned.
-
fillHistogram1DFromCollectionSubset(self, IHistogramData: ORSModel.ors.HistogramData, ICollection1: ORSModel.ors.SequenceableCollection, indexStart: int, indexEnd: int) → None¶ Fill a 1D histogram from the collection values, over a subset of the collection.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the 1D histogram to fill (an HistogramData)
- ICollection1 (ORSModel.ors.SequenceableCollection) – the collection (a SequenceableCollection)
- indexStart (int) – the first index of the collection to use (an uint64_t)
- indexEnd (int) – the last index of the collection to use (an uint64_t)
-
fillHistogram2DFromChannels(self, IHistogramData: ORSModel.ors.HistogramData, IChannel1: ORSModel.ors.Channel, IChannel2: ORSModel.ors.Channel, tChannel1: int, tChannel2: int, IROI: ORSModel.ors.ROI, tROI: int, IProgress: ORSModel.ors.Progress) → None¶ Fill a 2D histogram from the channels values, over the voxels specified by theROI.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the 2D histogram to fill (an HistogramData)
- IChannel1 (ORSModel.ors.Channel) – the channel of the first dimension (an Channel)
- IChannel2 (ORSModel.ors.Channel) – the channel of the second dimension (an Channel)
- tChannel1 (int) – the t index of the channel of the first dimension (an unsigned int)
- tChannel2 (int) – the t index of the channel of the second dimension (an unsigned int)
- IROI (ORSModel.ors.ROI) – the ROI specifying what channel voxels to include (an ROI). If this parameter is given as nullptr, all channel voxels will be used.
- tROI (int) – the t index of the ROI (an unsigned int)
- IProgress (ORSModel.ors.Progress) –
-
fillHistogram2DFromChannelsSubset(self, IHistogramData: ORSModel.ors.HistogramData, IChannel1: ORSModel.ors.Channel, IChannel2: ORSModel.ors.Channel, tChannel: int, xmin: int, ymin: int, zmin: int, xmax: int, ymax: int, zmax: int) → None¶ Fill a 2D histogram from the channels values, over a subset of the volume.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the 2D histogram to fill (an HistogramData)
- IChannel1 (ORSModel.ors.Channel) – the channel of the first dimension (an Channel)
- IChannel2 (ORSModel.ors.Channel) – the channel of the second dimension (an Channel)
- tChannel (int) – the t index of the channels (an unsigned int)
- xmin (int) – the minimal x index of the channels to use (an unsigned int)
- ymin (int) – the minimal y index of the channels to use (an unsigned int)
- zmin (int) – the minimal z index of the channels to use (an unsigned int)
- xmax (int) – the maximal x index of the channels to use (an unsigned int)
- ymax (int) – the maximal y index of the channels to use (an unsigned int)
- zmax (int) – the maximal z index of the channels to use (an unsigned int)
-
fillHistogram2DFromCollections(self, IHistogramData: ORSModel.ors.HistogramData, ICollection1: ORSModel.ors.SequenceableCollection, ICollection2: ORSModel.ors.SequenceableCollection, IFilterCollection: ORSModel.ors.SequenceableCollection, IArrayBinIndexes: ORSModel.ors.ArrayUnsignedLONGLONG) → None¶ Fill a 2D histogram from the collections values, over the elements specified by the filter collection.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the 2D histogram to fill (an HistogramData)
- ICollection1 (ORSModel.ors.SequenceableCollection) – the collection values of the first dimension (a SequenceableCollection)
- ICollection2 (ORSModel.ors.SequenceableCollection) – the collection values of the second dimension (a SequenceableCollection)
- IFilterCollection (ORSModel.ors.SequenceableCollection) – the filter collection (a SequenceableCollection). If this parameter is given as nullptr, all elements of the collections values will be used.
- IArrayBinIndexes (ArrayUnsignedLONGLONG) – an array filled with the linear bin index of each element. If this parameter is given as nullptr, these indexes won’t be returned.
-
fillHistogram2DFromCollectionsSubset(self, IHistogramData: ORSModel.ors.HistogramData, ICollection1: ORSModel.ors.SequenceableCollection, ICollection2: ORSModel.ors.SequenceableCollection, indexStart: int, indexEnd: int) → None¶ Fill a 2D histogram from the collections values, over a subset of the collection.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the 2D histogram to fill (an HistogramData)
- ICollection1 (ORSModel.ors.SequenceableCollection) – the collection of the first dimension (a SequenceableCollection)
- ICollection2 (ORSModel.ors.SequenceableCollection) – the collection of the second dimension (a SequenceableCollection)
- indexStart (int) – the first index of the collections to use (an uint64_t)
- indexEnd (int) – the last index of the collections to use (an uint64_t)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getOtsuThreshold(self, IHistogramData: ORSModel.ors.HistogramData, dimension: int) → float¶ Computes the Otsu threshold value along a dimension.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the ND histogram (an HistogramData)
- dimension (int) – the dimension along which the threshold is computed (an unsigned int)
Returns: output (float) –
-
mapHistogram2DLabels(self, IHistogramData: ORSModel.ors.HistogramData, ILMRHistogramLabels: ORSModel.ors.MultiROI, IChannel1: ORSModel.ors.Channel, IChannel2: ORSModel.ors.Channel, tChannel1: int, tChannel2: int, IROI: ORSModel.ors.ROI, tROI: int, ILMROutput: ORSModel.ors.MultiROI, tLMR: int) → None¶ Map labels of a LMR having the same shape as the 2D histogram into a LMR using the channels values.
Parameters: - IHistogramData (ORSModel.ors.HistogramData) – the 2D histogram (an HistogramData)
- ILMRHistogramLabels (ORSModel.ors.MultiROI) – the LMR of labels (histogram classification) (an MultiROI)
- IChannel1 (ORSModel.ors.Channel) – the channel of the first dimension (an Channel)
- IChannel2 (ORSModel.ors.Channel) – the channel of the second dimension (an Channel)
- tChannel1 (int) – the t index of the channel of the first dimension (an unsigned int)
- tChannel2 (int) – the t index of the channel of the second dimension (an unsigned int)
- IROI (ORSModel.ors.ROI) – the ROI specifying what channel voxels to include (an ROI). If this parameter is given as nullptr, all channel voxels will be used.
- tROI (int) – the t index of the ROI (an unsigned int)
- ILMROutput (ORSModel.ors.MultiROI) – the LMR receiving the labels (volume segmentation) (an MultiROI)
- tLMR (int) – the t index of the LMR (an unsigned int)
-
none()¶ HistogramAnalyzer.__init__() -> HistogramAnalyzer
-
HistogramData¶
-
class
ORSModel.ors.HistogramData¶ Bases:
ORSModel.ors.Nodebrief_description: An object that contains histogram data. author: Thierry Côté. All other members of ORS participated. version: 1.0 date: August 2005 An object that contains histogram data. Histograms can contain multiple dimensions (ex: one dimension for each color in a multicolor volume, and another for all of them). And, it can be in 1D or 2D, based on intensity for the 1D, and on both intensity and gradient in 2D. Size of bins stays constant across dimensions, but it is possible to choose different bin sizes for 1D and 2D.
-
addCountAtIndex1D(self, iIndex: int, countToAdd: int) → None¶ Add a number of counts at the given indexes.
Parameters: - iIndex (int) – bin index of the dimension 0
- countToAdd (int) – number of counts to add
-
addCountAtIndex2D(self, iIndex0: int, iIndex1: int, countToAdd: int) → None¶ Add a number of counts at the given indexes.
Parameters: - iIndex0 (int) – bin index of the dimension 0
- iIndex1 (int) – bin index of the dimension 1
- countToAdd (int) – number of counts to add
-
addCountAtValue1D(self, dValue: float, countToAdd: int, pBinIndex: int) → None¶ Add a number of counts for the given values.
Parameters: - dValue (float) – value in dimension 0
- countToAdd (int) – number of counts to add
- pBinIndex (int) – returned value of the linear bin index where the count is added
-
addCountAtValue2D(self, dValue0: float, dValue1: float, countToAdd: int, pLinearBinIndex: int) → None¶ Add a number of counts for the given values.
Parameters: - dValue0 (float) – value in dimension 0
- dValue1 (float) – value in dimension 1
- countToAdd (int) – number of counts to add
- pLinearBinIndex (int) – returned value of the linear bin index where the count is added
-
copyInto(self, destination: ORSModel.ors.HistogramData) → None¶ Copies the current histogram data in to the destination.
Parameters: destination (HistogramData) – destination Histogram
-
downSample(self, dimension: int, dStart: float, dEnd: float, nBins: int) → HistogramData¶ Returns a downsampled histogram.
Parameters: - dimension (int) – index of the dimension (starting at 0)
- dStart (float) – start of the bin edge
- dEnd (float) – end of the bin edge
- nBins (int) – number of bins for the new histogram
Returns: output (ORSModel.ors.HistogramData) – HistogramData
HistogramData.downSample(self, dimension: int, nBins: int) -> HistogramData
Returns a downsampled histogram.
Parameters: - dimension (int) – index of the dimension (starting at 0)
- nBins (int) – number of bins for the new histogram
Returns: output (ORSModel.ors.HistogramData) – HistogramData
-
getBinCount(self, dimension: int) → int¶ Get the number of bins in a given dimension.
Parameters: dimension (int) – index of the dimension (starting at 0) Returns: output (int) – The number of bins
-
getBinCounts(self) → ArrayUnsignedLong¶ Get the number of bins in each dimension.
Returns: output (ORSModel.ors.ArrayUnsignedLong) – An array with the number of bins in each dimension (an ArrayUnsignedLong)
-
getBinEdges(self, dimension: int) → ArrayDouble¶ Get the bin edges of the range in a given dimension.
Parameters: dimension (int) – index of the dimension (starting at 0) Returns: output (ORSModel.ors.ArrayDouble) – An array with the bin edges (the number of edges is 1 more than the number of bins)
-
getBinEdgesEnd(self, dimension: int) → float¶ Get the ending value of the range in a given dimension.
Parameters: dimension (int) – index of the dimension (starting at 0) Returns: output (float) – The ending value of the range
-
getBinEdgesStart(self, dimension: int) → float¶ Get the starting value of the range in a given dimension.
Parameters: dimension (int) – index of the dimension (starting at 0) Returns: output (float) – The starting value of the range
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCountAtIndex1D(self, iIndex: int) → int¶ Get the number of counts at the given index.
Parameters: iIndex (int) – bin index Returns: output (int) – Number of counts
-
getCountAtIndex2D(self, iIndex0: int, iIndex1: int) → int¶ Get the number of counts at the given index.
Parameters: - iIndex0 (int) – bin index
- iIndex1 (int) –
Returns: output (int) – Number of counts
-
getCumulativeDistribution(self, dimension: int) → HistogramData¶ Computes the cumulative distribution along one dimension.
Parameters: dimension (int) – dimension along which the cumulation is made Returns: output (ORSModel.ors.HistogramData) – New histogramData
-
getData(self) → ArrayUnsignedLONGLONG¶ Returns: output (ArrayUnsignedLONGLONG) –
-
getDimensionCount(self) → int¶ Get the number of dimensions.
Returns: output (int) – The number of dimensions (a uint32_t)
-
getIndexAtValue1D(self, dValue: float) → int¶ Determines the bin index for a given value.
Parameters: dValue (float) – value Returns: output (int) – bin index
-
getIndexAtValueForDimension(self, dimension: int, dValue: float) → int¶ Determines the bin index for a given value in a given dimension.
Parameters: - dimension (int) – index of the dimension (starting at 0)
- dValue (float) – value
Returns: output (int) – bin index
-
getIsDataInitialized(self) → bool¶ Get the status of the data.
Returns: output (bool) – TRUE if the data is initialized, FALSE otherwise
-
getIsHistogramDegenerated(self) → bool¶ Get the degenerated state of the histogram.
Returns: output (bool) – TRUE if the histogram is degenerated, FALSE otherwise
-
getIsSparse(self) → bool¶ Get the sparse representation state.
Returns: output (bool) – true if using a sparse representation, false if using a dense representation
-
initializeData(self) → bool¶ Initialize the memory to contain the histogram data. If the data is already initialized, all values of the data are set to 0.
Returns: output (bool) – TRUE if successful, FALSE otherwise
-
isValueInsideRangeLimits(self, dimension: int, dValue: float) → bool¶ Determines if the given value is in the range.
Parameters: - dimension (int) – index of the dimension (starting at 0)
- dValue (float) – value to test
Returns: output (bool) – TRUE if the value is inside the range, FALSE otherwise
-
none()¶ HistogramData.__init__() -> HistogramData
-
setBinEdgesFromArray(self, dimension: int, dValues: ORSModel.ors.ArrayDouble) → None¶ Set the range for a given dimension, with bin edges specified individually.
Parameters: - dimension (int) – array of bin edges (the number of bins is 1 less than the number of edges specified)
- dValues (ORSModel.ors.ArrayDouble) –
-
setBinEdgesFromRange(self, dimension: int, dStart: float, dEnd: float, nbBins: int) → None¶ Set the range for a given dimension, for equally spaced bins, using the starting value, the end value and the number of bins.
Parameters: - dimension (int) – index of the dimension (starting at 0)
- dStart (float) – range start
- dEnd (float) – range end
- nbBins (int) – number of bins
-
setBinEdgesFromWidth(self, dimension: int, dStart: float, dWidth: float, nbBins: int) → None¶ Set the range for a given dimension, for equally spaced bins, using the starting value, the bin width and the number of bins.
Parameters: - dimension (int) – index of the dimension (starting at 0)
- dStart (float) – range start
- dWidth (float) – bin width
- nbBins (int) – number of bins
-
setCountAtIndex1D(self, iIndex: int, countToSet: int) → None¶ Set the number of counts at the given index.
Parameters: - iIndex (int) – bin index in which the count should be set (a uint32_t)
- countToSet (int) – number of counts to set
-
setCountAtIndex2D(self, iIndex0: int, iIndex1: int, countToSet: int) → None¶ Set the number of counts at the given index.
Parameters: - iIndex0 (int) – bin index in which the count should be set
- iIndex1 (int) – number of counts to set
- countToSet (int) –
-
setDimensionCount(self, nbDimensions: int) → None¶ Sets the number of dimensions.
Parameters: nbDimensions (int) – number of dimensions (a uint32_t)
-
setUseSparse(self, bUseSparse: bool) → None¶ Specifies if a sparse representation should be used internally.
Parameters: bUseSparse (bool) – true to use a sparse representation, false to use a dense representation
-
sumAlongDimension(self, dimension: int) → HistogramData¶ Sum the counts along one dimension.
Parameters: dimension (int) – dimension along which the sum is made Returns: output (ORSModel.ors.HistogramData) – New histogramData
-
Image¶
-
class
ORSModel.ors.Image¶ Bases:
ORSModel.ors.Node-
copy(self) → Image¶ Copies the current image object.
Returns: output (ORSModel.ors.Image) – a new image copied (an Image)
-
copyDataFromChannel(self, aChannel: ORSModel.ors.Channel, timeStep: int) → None¶ Parameters: - aChannel (ORSModel.ors.Channel) –
- timeStep (int) –
-
copyDataFromChannelWithLookupTable(self, aChannel: ORSModel.ors.Channel, timeStep: int, levelingMinValue: float, levelingMaxValue: float, slabThickness: float, aLUT: ORSModel.ors.LookupTable, alpha: float) → None¶ Parameters: - aChannel (ORSModel.ors.Channel) –
- timeStep (int) –
- levelingMinValue (float) –
- levelingMaxValue (float) –
- slabThickness (float) –
- aLUT (ORSModel.ors.LookupTable) –
- alpha (float) –
-
dtype¶
-
exportToFile(filename)¶ Exports an image to a file
Parameters: filename (file saving) – fully qualified file name Returns: exportSuccess (bool) – True if succeeded, False otherwise
-
flipImageDataHorizontally(self) → None¶
-
flipImageDataVertically(self) → None¶
-
getAllocatedSize(self) → int¶ Returns: output (int) –
-
getBoundedPlane(self) → Rectangle¶ Returns: output (ORSModel.ors.Rectangle) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getComponent(index)¶
-
getComponentCountPerPixel(self) → int¶ Gets the number of components per pixel.
Returns: output (int) – a count (an short)
-
getComponents()¶
-
getDataOffsetForPixelComponent(self, componentIndex: int) → float¶ Parameters: componentIndex (int) – Returns: output (float) –
-
getDataSlopeForPixelComponent(self, componentIndex: int) → float¶ Parameters: componentIndex (int) – Returns: output (float) –
-
getDataType(self) → int¶ Gets the image data type.
Note
See CxvChannel_Data_Type (in ORS_def.h) for supported types.
Returns: output (int) – a type (a int32_t)
-
getIsDataInitialized(self) → bool¶ Checks if the internal data is initialized.
Note
The channel must be initialized before you start using the channel.
Returns: output (bool) – true if initialized correctly, false otherwise
-
getMaxU(self) → float¶ Returns: output (float) –
-
getMaxV(self) → float¶ Returns: output (float) –
-
getMinU(self) → float¶ Returns: output (float) –
-
getMinV(self) → float¶ Returns: output (float) –
-
getNDArray()¶
-
getRawImageData(self) → None¶
-
getXSize(self) → int¶ Gets the X size of the image.
Returns: output (int) – the X size (a uint32_t)
-
getYSize(self) → int¶ Gets the Y size of the image.
Returns: output (int) – the Y size (a uint32_t)
-
initialize(self, aDataType: int, componentPerPixelCount: int, aBoundedPlane: ORSModel.ors.Rectangle) → bool¶ Initializes the image.
Note
See CxvChannel_Data_Type (in ORS_def.h) for supported data types.
Parameters: - aDataType (int) – the datatype (a int32_t*, see note below)
- componentPerPixelCount (int) – the number of components per pixel (an unsigned short)
- aBoundedPlane (ORSModel.ors.Rectangle) – the image size (a Rectangle)
Returns: output (bool) – TRUE if successful, FALSE otherwise
-
loadFromFile(filename)¶ Loads an image from a file
Parameters: filename (file) – fully qualified file name Returns: exportSuccess (bool) – True if succeeded, False otherwise
-
none()¶ Image.__init__() -> Image
-
setBoundedPlane(self, aBoundedPlane: ORSModel.ors.Rectangle) → None¶ Parameters: aBoundedPlane (ORSModel.ors.Rectangle) –
-
setDataOffsetForPixelComponent(self, offset: float, componentIndex: int) → None¶ Parameters: - offset (float) –
- componentIndex (int) –
-
setDataSlopeForPixelComponent(self, slope: float, componentIndex: int) → None¶ Parameters: - slope (float) –
- componentIndex (int) –
-
setDirections(self, direction0: ORSModel.ors.Vector3, direction1: ORSModel.ors.Vector3) → None¶ Parameters: - direction0 (ORSModel.ors.Vector3) –
- direction1 (ORSModel.ors.Vector3) –
-
setMaxU(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setMaxV(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setMinU(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setMinV(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setOrigin(self, origin: ORSModel.ors.Vector3) → None¶ Parameters: origin (ORSModel.ors.Vector3) –
-
setSpacings(self, xSpacing: float, ySpacing: float) → None¶ Parameters: - xSpacing (float) –
- ySpacing (float) –
-
shape¶
-
transform(self, aTransformationMatrix: ORSModel.ors.Matrix4x4) → None¶ Parameters: aTransformationMatrix (ORSModel.ors.Matrix4x4) –
-
ImageCollection¶
-
class
ORSModel.ors.ImageCollection¶ Bases:
ORSModel.ors.Node-
deleteAllImages(self) → None¶ Deletes all images.
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getImageAtIndex(self, imageIndex: int) → Image¶ Gets the image at an index position.
Parameters: imageIndex (int) – the image index (an uint32_t) Returns: output (ORSModel.ors.Image) – an image (an Image or NULL if index is invalid)
-
getImageCount(self) → int¶ Gets the image count.
Returns: output (int) – the count of images (an uint32_t)
-
getIndexOfImage(self, anImage: ORSModel.ors.Image) → int¶ Gets the index position of an image.
Note
Returns -1 if image is not present.
Parameters: anImage (ORSModel.ors.Image) – an image (an Image) Returns: output (int) – the image index (an int)
-
insertImageAtIndex(self, imageIndex: int, anImage: ORSModel.ors.Image) → None¶ Inserts an image at a given index.
Parameters: - imageIndex (int) – the image index (an uint32_t)
- anImage (ORSModel.ors.Image) – an image (an Image)
-
insertImageFirst(self, anImage: ORSModel.ors.Image) → None¶ Inserts an image at start of list.
Parameters: anImage (ORSModel.ors.Image) – an image (an Image)
-
insertImageLast(self, anImage: ORSModel.ors.Image) → None¶ Inserts an image at end of list.
Parameters: anImage (ORSModel.ors.Image) – an image (an Image)
-
none()¶ ImageCollection.__init__() -> ImageCollection
-
removeAllImages(self) → None¶ Removes all images.
-
removeImage(self, anImage: ORSModel.ors.Image) → None¶ Removes an image.
Parameters: anImage (ORSModel.ors.Image) – an image (an Image)
-
removeImageAtIndex(self, imageIndex: int) → None¶ Removes the image at given index.
Parameters: imageIndex (int) – the image index (an uint32_t)
-
ImageCollectionPresenter¶
-
class
ORSModel.ors.ImageCollectionPresenter¶ Bases:
ORSModel.ors.DatasetPresenter-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getImageIndexForView(self, aView: ORSModel.ors.View) → int¶ Parameters: aView (ORSModel.ors.View) – Returns: output (int) –
-
getNodeVisibleForAllImage(self, aNode: ORSModel.ors.Node) → bool¶ Parameters: aNode (ORSModel.ors.Node) – Returns: output (bool) –
-
getNodeVisibleForImage(self, aNode: ORSModel.ors.Node, anImage: ORSModel.ors.Image) → bool¶ Parameters: - aNode (ORSModel.ors.Node) –
- anImage (ORSModel.ors.Image) –
Returns: output (bool) –
-
getPresentationBoundedPlane(self) → Rectangle¶ Returns: output (ORSModel.ors.Rectangle) –
-
none()¶ ImageCollectionPresenter.__init__() -> ImageCollectionPresenter
-
setImageIndexForView(self, aView: ORSModel.ors.View, imageIndex: int) → None¶ Parameters: - aView (ORSModel.ors.View) –
- imageIndex (int) –
-
setNodeNotVisibleForAllImage(self, aNode: ORSModel.ors.Node) → None¶ Parameters: aNode (ORSModel.ors.Node) –
-
setNodeNotVisibleForImage(self, aNode: ORSModel.ors.Node, anImage: ORSModel.ors.Image) → None¶ Parameters: - aNode (ORSModel.ors.Node) –
- anImage (ORSModel.ors.Image) –
-
setNodeVisibleForAllImage(self, aNode: ORSModel.ors.Node) → None¶ Parameters: aNode (ORSModel.ors.Node) –
-
setNodeVisibleForImage(self, aNode: ORSModel.ors.Node, anImage: ORSModel.ors.Image) → None¶ Parameters: - aNode (ORSModel.ors.Node) –
- anImage (ORSModel.ors.Image) –
-
setPresentationBoundedPlane(self, aBoudedPlane: ORSModel.ors.Rectangle) → None¶ Parameters: aBoudedPlane (ORSModel.ors.Rectangle) –
-
Intersection¶
-
class
ORSModel.ors.Intersection¶ Bases:
ORSModel.ors.Unmanagedbrief_description: Represents a ray pick result. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: View::pick(), Node::pick()
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getClosestVisual(self) → Visual¶ Returns the picked visual object closest to the pick point.
Note
Since more than one visual can be found by the pick ray, either because visuals are superimposed or because they are found within the pick tolerance, this method returns the closest visual to the pick point.
Returns: output (ORSModel.ors.Visual) – a visual (an Visual), or NULL if no visual was picked
-
getClosestVisualOfClass(self, pProgId: str) → Visual¶ Returns the visual object of a given class closest to the pick point.
Note
Since more than one visual can be found by the pick ray, either because visuals are superimposed or because they are found within the pick tolerance, this method returns the closest visual to the pick point.
Parameters: pProgId (str) – Returns: output (ORSModel.ors.Visual) – a visual (a Visual), or NULL if no visual was picked
-
getColor(self) → Color¶ Returns the color value of the intersection.
Returns: output (ORSModel.ors.Color) – a color (a Color)
-
getColorInPhysicalUnits(self) → Color¶ Gets the color value, adjusted to physical units (slope and offset).
Returns: output (ORSModel.ors.Color) – the color (a Color)
-
getControlPointIndexHit(self) → int¶ Returns: output (int) –
-
getDataUnit(self) → str¶ Returns: output (str) –
-
getDistance(self) → float¶ Returns the distance from the ray pick origin to the intersection.
Note
Distances are calculated in pixels.
Returns: output (float) – a double
-
getFarthestVisual(self) → Visual¶ Returns the picked visual object farthest from the pick point.
Note
Since more than one visual can be found by the pick ray, either because visuals are superimposed or because they are found within the pick tolerance, this method returns the farthest visual from the pick point.
Returns: output (ORSModel.ors.Visual) – a visual (a Visual), or NULL if no visual was picked
-
getFarthestVisualOfClass(self, pProgId: str) → Visual¶ Returns the visual object of a given class farthest from the pick point.
Note
Since more than one visual can be found by the pick ray, either because visuals are superimposed or because they are found within the pick tolerance, this method returns the farthest visual from the pick point.
Parameters: pProgId (str) – Returns: output (ORSModel.ors.Visual) – a visual (a Visual), or NULL if no visual was picked
-
getHit(self) → bool¶ Checks if the ray pick intersects something.
Returns: output (bool) – true if the intersection is valid, false otherwise
-
getHitCount(self) → int¶ Returns: output (int) –
-
getMeshFace(self) → int¶ When picking a mesh, returns the face index of the triangle being picked.
Returns: output (int) – a face index in the mesh (a int32_t)
-
getMeshFaceBary1(self) → float¶ Returns the barycentric coordinate 1.
Returns: output (float) – a double between 0 and 1
-
getMeshFaceBary2(self) → float¶ Returns the barycentric coordinate 1.
Returns: output (float) – a double between 0 and 1
-
getMeshVertexIndex0(self) → int¶ When picking a mesh, returns the index 1 of the vertex being picked.
Returns: output (int) – a vertex index 1 (a int32_t)
-
getMeshVertexIndex1(self) → int¶ When picking a mesh, returns the index 1 of the vertex being picked.
Returns: output (int) – a vertex index 1 (a int32_t)
-
getMeshVertexIndex2(self) → int¶ When picking a mesh, returns the index 1 of the vertex being picked.
Returns: output (int) – a vertex index 1 (a int32_t)
-
getNearestMeshVertexIndex(self) → int¶ When picking a mesh, returns the vertex index nearest to the point being picked.
Returns: output (int) – a vertex index in the mesh (a int32_t)
-
getNthDistance(self, nth: int) → float¶ Parameters: nth (int) – Returns: output (float) –
-
getNthLabel(self, nth: int) → int¶ Parameters: nth (int) – Returns: output (int) –
-
getNthMeshFace(self, nth: int) → int¶ Parameters: nth (int) – Returns: output (int) –
-
getNthMeshFaceBary1(self, nth: int) → float¶ Parameters: nth (int) – Returns: output (float) –
-
getNthMeshFaceBary2(self, nth: int) → float¶ Parameters: nth (int) – Returns: output (float) –
-
getNthMeshVertexIndex0(self, nth: int) → int¶ Parameters: nth (int) – Returns: output (int) –
-
getNthMeshVertexIndex1(self, nth: int) → int¶ Parameters: nth (int) – Returns: output (int) –
-
getNthMeshVertexIndex2(self, nth: int) → int¶ Parameters: nth (int) – Returns: output (int) –
-
getNthNearestMeshVertexIndex(self, nth: int) → int¶ Parameters: nth (int) – Returns: output (int) –
-
getNthPositionInLocalCoordinates(self, nth: int) → Vector3¶ Parameters: nth (int) – Returns: output (ORSModel.ors.Vector3) –
-
getNthPositionInWorldCoordinates(self, nth: int) → Vector3¶ Parameters: nth (int) – Returns: output (ORSModel.ors.Vector3) –
-
getNthScalarValue(self, nth: int) → float¶ Parameters: nth (int) – Returns: output (float) –
-
getOffset(self) → float¶ Gets the intersection offset, which is the offset of the channel being picked.
Returns: output (float) – the offset (a double)
-
getPickDirection(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getPickOrigin(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getPixelPositionInView(self) → Vector3¶ Returns the position of the intersection in screen coordinates.
Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
getPositionInLocalCoordinates(self) → Vector3¶ Returns the position of the intersection in local coordinates.
Returns: output (ORSModel.ors.Vector3) – a point (a Vector3)
-
getPositionInVoxelIndex(self) → Vector3¶ Returns the position of the intersection as X/Y/Z indicies.
Note
The point vector will contain X/Y/Z indicies.
Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
getPositionInWorldCoordinates(self) → Vector3¶ Returns the position of the intersection in world coordinates.
Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
getScalarValue(self) → float¶ Returns the scalar value of the picked triangle.
Returns: output (float) – the scalar value (a double)
-
getSlope(self) → float¶ Gets the intersection slope, which is the slope of the channel being picked.
Returns: output (float) – the slope (a double)
-
getStructuredGridAtIndex(self, iIndex: int) → StructuredGrid¶ Returns the Nth picked structured grid object.
Note
Since more than one visual can be found by the pick ray, either because visuals are superimposed or because they are found within the pick tolerance, this method returns the Nth visual.
Parameters: iIndex (int) – the structured grid index (an unsigned short, zero based) Returns: output (ORSModel.ors.StructuredGrid) – a structured grid (a StructuredGrid), or NULL if the index given is invalid
-
getStructuredGridCount(self) → int¶ Returns the number of structured grid objects that were intersected by the ray pick.
Note
Since more than one structured grid can be found at any given point, this method returns how many visual objects were touched by the ray pick.
Returns: output (int) – a structured grid object count (an short)
-
getTimeStep(self) → int¶ Returns the T value of the intersection.
Returns: output (int) – a uint32_t
-
getVisualAtIndex(self, iIndex: int) → Visual¶ Returns the Nth picked visual object.
Note
Since more than one visual can be found by the pick ray, either because visuals are superimposed or because they are found within the pick tolerance, this method returns the Nth visual.
Parameters: iIndex (int) – the visual index (an unsigned short, zero based) Returns: output (ORSModel.ors.Visual) – a visual (a Visual), or NULL if the index given is invalid
-
getVisualCount(self) → int¶ Returns the number of visual objects that were intersected by the ray pick.
Note
Since more than one visual can be found at any given point, this method returns how many visual objects were touched by the ray pick.
Returns: output (int) – a visual object count (an short)
-
getVoxelIndex(self) → int¶ Returns the index of the voxel being picked.
Note
The index is computed as follows: (T value * zSize * ySize * xSize) + (Z value * xSize * ySize) + (Y value * xSize) + (X value)
Returns: output (int) – an index (a int64_t)
-
getWindowLeveledNormalizedValue(self) → float¶ Returns the value with window leveling applied, normalized between 0 and 1.
Returns: output (float) – a double between 0 and 1
-
getXIndexInCurvedChannel(self) → float¶ Returns: output (float) –
-
getYIndexInCurvedChannel(self) → float¶ Returns: output (float) –
-
none()¶ Intersection.__init__() -> Intersection
-
Layout¶
-
class
ORSModel.ors.Layout¶ Bases:
ORSModel.ors.Managedbrief_description: object used to describe a view layout author: N Piche All other members of ORS participated. version: 1.0 date: December 2015 Object that represent a layout of views
-
addFirst(self, aLayout: ORSModel.ors.Layout) → None¶ Parameters: aLayout (ORSModel.ors.Layout) –
-
addLast(self, aLayout: ORSModel.ors.Layout) → None¶ Parameters: aLayout (ORSModel.ors.Layout) –
-
copy(self) → Layout¶ Returns a copy of the managed.
Note
Only the immediate attributes of the managed are copied. The graph surrounding the new managed is the same one as the source managed.
Note
You can type the return value of this method to any subclass of Managed, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be NULL.
Returns: output (ORSModel.ors.Layout) – a new managed (a Managed)
-
getAllChildLayout(self) → List¶ Returns: output (ORSModel.ors.List) –
-
getAllChildViews(self) → List¶ Returns: output (ORSModel.ors.List) –
-
getAllLeaves(self) → List¶ Returns: output (ORSModel.ors.List) –
-
getBottomRight(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getBottomRightPositionOfChildren(self, aLayout: ORSModel.ors.Layout) → Vector3¶ Parameters: aLayout (ORSModel.ors.Layout) – Returns: output (ORSModel.ors.Vector3) –
-
getChildWithPrivateTitle(self, privateTitle: str) → Layout¶ Parameters: privateTitle (str) – Returns: output (ORSModel.ors.Layout) –
-
getChildren(self) → List¶ Returns: output (ORSModel.ors.List) –
-
getChildrenAtIndex(self, index: int) → Layout¶ Parameters: index (int) – Returns: output (ORSModel.ors.Layout) –
-
getChildrenCount(self) → int¶ Returns: output (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getContext()¶
-
getEnabled(self) → bool¶ Returns: output (bool) –
-
getEnabledChildrenCount(self) → int¶ Returns: output (int) –
-
getGenealogicalName(self) → str¶ Returns: output (str) –
-
getHasChildren(self) → bool¶ Returns: output (bool) –
-
getIsLayoutMyDescendent(self, aLayout: ORSModel.ors.Layout) → bool¶ Parameters: aLayout (ORSModel.ors.Layout) – Returns: output (bool) –
-
getIsLinear(self) → bool¶ Returns: output (bool) –
-
getIsMyChildren(self, aLayout: ORSModel.ors.Layout) → bool¶ Parameters: aLayout (ORSModel.ors.Layout) – Returns: output (bool) –
-
getIsVertical(self) → bool¶ Returns: output (bool) –
-
getLayoutClass(self) → str¶ Returns: output (str) –
-
getLeaveEmpty(self) → bool¶ Returns: output (bool) –
-
getParent(self) → Layout¶ Returns: output (ORSModel.ors.Layout) –
-
getTopLeft(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getTopLeftPositionOfChildren(self, aLayout: ORSModel.ors.Layout) → Vector3¶ Parameters: aLayout (ORSModel.ors.Layout) – Returns: output (ORSModel.ors.Vector3) –
-
getViewGUID(self) → str¶ Returns: output (str) –
-
getWeight(self) → float¶ Returns: output (float) –
-
none()¶ Layout.__init__() -> Layout
-
normalizeChildrenWeights(self) → None¶
-
propagateLayoutUpdated(self) → bool¶ Returns: output (bool) –
-
removeAllChildren(self) → None¶
-
removeChildren(self, aLayout: ORSModel.ors.Layout) → None¶ Parameters: aLayout (ORSModel.ors.Layout) –
-
replaceChildren(self, aLayoutToBeReplace: ORSModel.ors.Layout, aLayoutReplacement: ORSModel.ors.Layout) → bool¶ Parameters: - aLayoutToBeReplace (ORSModel.ors.Layout) –
- aLayoutReplacement (ORSModel.ors.Layout) –
Returns: output (bool) –
-
setBottomRight(self, aVector: ORSModel.ors.Vector3) → None¶ Parameters: aVector (ORSModel.ors.Vector3) –
-
setEnabled(self, bEnabled: bool) → None¶ Parameters: bEnabled (bool) –
-
setIsLinear(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setIsVertical(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setLayoutClass(self, aClass: str) → None¶ Parameters: aClass (str) –
-
setLeaveEmpty(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setTopLeft(self, aVector: ORSModel.ors.Vector3) → None¶ Parameters: aVector (ORSModel.ors.Vector3) –
-
setViewGUID(self, aGUID: str) → None¶ Parameters: aGUID (str) –
-
setWeight(self, aValue: float) → None¶ Parameters: aValue (float) –
-
Line¶
-
class
ORSModel.ors.Line¶ Bases:
ORSModel.ors.Shape2Dbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2010
-
copy(self) → Line¶ Gets a copy of the receiver.
Returns: output (ORSModel.ors.Line) – a line (an Line)
-
createFromPythonRepresentation(aPythonRepresentation: str) → Line¶ Create aUnmanaged Object from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Line) –
-
fromOriginAndOrientation(self, origin: ORSModel.ors.Vector3, orientation: ORSModel.ors.Vector3) → None¶ Sets the the origin and orientation of the line.
Note
The orientation vector will be normalized.
Parameters: - origin (ORSModel.ors.Vector3) – a point (an Vector3)
- orientation (ORSModel.ors.Vector3) – an orientation (an Vector3)
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
fromTwoPoints(self, point0: ORSModel.ors.Vector3, point1: ORSModel.ors.Vector3) → None¶ Sets the the origin and orientation of the line based on the two provided points.
Parameters: - point0 (ORSModel.ors.Vector3) – a point (an Vector3)
- point1 (ORSModel.ors.Vector3) – a point (an Vector3)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getClosestPointOnLineFromPoint(self, aPoint: ORSModel.ors.Vector3) → Vector3¶ Parameters: aPoint (ORSModel.ors.Vector3) – Returns: output (ORSModel.ors.Vector3) –
-
getDistanceFromLine(self, aLine: ORSModel.ors.Line) → float¶ Parameters: aLine (ORSModel.ors.Line) – Returns: output (float) –
-
getDistanceFromPoint(self, pVect: ORSModel.ors.Vector3) → float¶ Gets the distance from the receiver to the provided point.
Parameters: pVect (ORSModel.ors.Vector3) – a point (an Vector3) Returns: output (float) – the distance (a double)
-
getIsEqualTo(self, aLine: ORSModel.ors.Line) → bool¶ Parameters: aLine (ORSModel.ors.Line) – Returns: output (bool) –
-
getOrientation(self) → Vector3¶ Gets the receiver orientation.
Note
The orientation vector is normalized.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getOrigin(self) → Vector3¶ Gets the receiver origin position.
Note
The origin is in world coordinates.
Returns: output (ORSModel.ors.Vector3) – the origin (an Vector3)
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
none()¶ Line.__init__() -> Line
-
setOrientation(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the receiver orientation.
Note
The orientation vector will be normalized.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setOrigin(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the receiver origin position.
Note
The origin should be in world coordinates.
Parameters: pVect (ORSModel.ors.Vector3) – a poing (an Vector3)
-
LineSegment¶
-
class
ORSModel.ors.LineSegment¶ Bases:
ORSModel.ors.Shape2Dbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2010
-
copy(self) → LineSegment¶ Gets a copy of the receiver.
Returns: output (ORSModel.ors.LineSegment) – a box (an LineSegment)
-
createFromPythonRepresentation(aPythonRepresentation: str) → LineSegment¶ Create aUnmanaged Object from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.LineSegment) –
-
fromOriginAndDirectionAndLength(self, origin: ORSModel.ors.Vector3, direction: ORSModel.ors.Vector3, length: float) → None¶ Parameters: - origin (ORSModel.ors.Vector3) –
- direction (ORSModel.ors.Vector3) –
- length (float) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getDistanceFromPoint(self, pVect: ORSModel.ors.Vector3) → float¶ Gets the distance from the receiver to the provided point,.
Parameters: pVect (ORSModel.ors.Vector3) – a point (an Vector3) Returns: output (float) – the distance (a double)
-
getEnd(self) → Vector3¶ Gets the receiver end point.
Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
getIsEqualTo(self, aLineSegment: ORSModel.ors.LineSegment) → bool¶ Parameters: aLineSegment (ORSModel.ors.LineSegment) – Returns: output (bool) –
-
getLength(self) → float¶ Gets the receiver length.
Returns: output (float) – a length (a double)
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getStart(self) → Vector3¶ Gets the receiver start point.
Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
none()¶ LineSegment.__init__() -> LineSegment
-
setEnd(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the receiver end point.
Parameters: pVect (ORSModel.ors.Vector3) – a point (an Vector3)
-
setStart(self, pVect: ORSModel.ors.Vector3) → None¶ Set the receiver start point.
Parameters: pVect (ORSModel.ors.Vector3) – a point (an Vector3)
-
List¶
-
class
ORSModel.ors.List¶ Bases:
ORSModel.ors.ORSBaseClassbrief_description: A list of author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: Managed, Node A list of Managed instances. Several methods in the SDK return lists of objects. Some typecasts are necessary to convert Object instances to their correct type because all services of List take or return only Managed instances.
-
add(self, pObject: ORSModel.ors.Managed) → None¶ Adds an object to the list.
Parameters: pObject (ORSModel.ors.Managed) – an object (an Object)
-
appendAllObjects(self, pList: ORSModel.ors.List) → None¶ Appends a list to the list.
Note
All objects are taken from the appended list, whether or not they are already in the receiver list.
Parameters: pList (ORSModel.ors.List) – a list (a List)
-
appendNonPresentObjects(self, pList: ORSModel.ors.List) → None¶ Appends a list to the list, taking only the objects not present in the receiver.
Note
Only the objects not already in the receiver are taken from the appended list.
Parameters: pList (ORSModel.ors.List) – a list (a List)
-
extend(iterable)¶
-
getAllElementsOfClass(self, sClassname: str) → List¶ Gets all the elements that belong to a given class.
Parameters: sClassname (str) – the class name of the class to test against (a string) Returns: output (ORSModel.ors.List) – a list (a List)
-
getClassNameStatic() → str¶ Returns: output (str) –
-
getCount(self) → int¶ Returns the count of objects in the list.
Returns: output (int) – object count (an uint32_t)
-
getIncludes(self, pObject: ORSModel.ors.Managed) → bool¶ Verifies if an object is present in the list.
Parameters: pObject (ORSModel.ors.Managed) – an object (an Object) Returns: output (bool) – true if object is in the list, false otherwise
-
getIndexOf(self, pObject: ORSModel.ors.Managed) → int¶ Parameters: pObject (ORSModel.ors.Managed) – Returns: output (int) –
-
getIntersectionWith(self, pList: ORSModel.ors.List) → List¶ Returns the intersection of the list with another list.
Note
Objects duplicated in both lists only appear once in the intersected list.
Parameters: pList (ORSModel.ors.List) – a list (a List) Returns: output (ORSModel.ors.List) – a new list (a List)
-
getObjectAt(self, pos: int) → Managed¶ Gets an object from the list at the specified index.
Note
Index starts at zero (zero-based).
Note
When the type of the object is known, you can pre-type it as it will automatically typecast to the correct type, for example: Channel IChan = someList->getObjectAt(0). If the object at index 0 is not a channel, IChan will be none.
Parameters: pos (int) – an index (an uint32_t) Returns: output (ORSModel.ors.Managed) – an object (a Managed)
-
getPythonRepresentation(self) → str¶ Returns the python representation of the list.
Returns: output (str) – str
-
getSubtractionFrom(self, pList: ORSModel.ors.List) → List¶ Returns the subtraction of another list from the list.
Note
The subtraction results in a list of objects only in the receiver (union of both lists is removed from the list, or A - (A U B)).
Parameters: pList (ORSModel.ors.List) – a list (a List) Returns: output (ORSModel.ors.List) – a new list (a List)
-
getUnionWith(self, pList: ORSModel.ors.List) → List¶ Returns the union of the list with another list.
Note
Objects duplicated in both lists only appear once in the unionized list.
Parameters: pList (ORSModel.ors.List) – a list (a List) Returns: output (ORSModel.ors.List) – a new list (a List)
-
index(item)¶
-
isNone(self) → bool¶ Returns: output (bool) –
-
isNotNone(self) → bool¶ Returns: output (bool) –
-
loadEmptyObjectsFromFile(self, sFilename: str) → None¶ Create empty objects from all the objects found within the file and adds them to the list.
Note
This is meant to quickly analyze an object or session file to know what types of objects are within. An empty object of the correct class will be created for every object defined in the file.
Parameters: sFilename (str) – an input filename (a string)
-
loadFromFile(self, sFilename: str, preserveIdentity: bool, progress: ORSModel.ors.Progress) → None¶ Loads all the objects found within the file and adds them to the list.
Note
This illustrates the meaning of the “preserve identity” argument, if you load a file that has the same object twice in a row, if you preserve identity you’ll obtain 1 object, if you don’t preserve identity you’ll obtain 2 objects (both having the same internal state).
Parameters: - sFilename (str) – an input filename (a string)
- preserveIdentity (bool) – true to preserve identity, false otherwise (see note)
- progress (ORSModel.ors.Progress) – a progress object
-
loadFromFileFiltered(self, sFilename: str, preserveIdentity: bool, classNames: ORSModel.ors.typing.List[str], progress: ORSModel.ors.Progress) → None¶ Loads all the objects found within the file and adds them to the list, keeping only specified classes.
Note
This illustrates the meaning of the “preserve identity” argument, if you load a file that has the same object twice in a row, if you preserve identity you’ll obtain 1 object, if you don’t preserve identity you’ll obtain 2 objects (both having the same internal state).
Note
The filter list should be a list of class names to filter on, for example, to load only ROI and MultiROI objects, one would specify ROI.getClassNameStatic() and MultiROI.getClassNameStatic().
Parameters: - sFilename (str) – an input filename (a string)
- preserveIdentity (bool) – true to preserve identity, false otherwise (see note)
- classNames (typing.List[str]) – list of class names (see note)
- progress (ORSModel.ors.Progress) – a progress object
-
none()¶ List.__init__() -> List
-
remove(self, pObject: ORSModel.ors.Managed) → bool¶ Removes an object from the list.
Parameters: pObject (ORSModel.ors.Managed) – an object (an Object) Returns: output (bool) – true if object was removed, false otherwise (it wasn’t in the list)
-
removeDuplicates(self) → None¶
-
saveToFile(self, sFilename: str) → int¶ Saves all the objects in the list to a file.
Parameters: sFilename (str) – an output filename (a string) Returns: output (int) – a result (an int, 0 for no error, otherwise an error code)
-
Loader¶
-
class
ORSModel.ors.Loader¶ Bases:
ORSModel.ors.Managedbrief_description: Allows to load previously saved author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: Saver Allows to load previously saved ORS objects. ORS objects are saved in XML format, so this loader uses internally the msxml framework (hence the frequent mention of DOM). Can be used to load and parse any XML (i.e. not only to load objects).
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCurrentNodeAttributeValue(self, attributeName: str) → str¶ Parameters: attributeName (str) – Returns: output (str) –
-
getCurrentNodeBoolAttributeValue(self, sAttributeName: str) → bool¶ Gets a boolean attribute from the current node in an XML tree being parsed.
Note
Return is false if attribute name is not found.
Parameters: sAttributeName (str) – the attribute name (a string) Returns: output (bool) – the value (a bool)
-
getCurrentNodeBoolValue(self) → bool¶ Gets the current node boolean value in an XML tree being parsed.
Returns: output (bool) – the node value (a bool)
-
getCurrentNodeDoubleAttributeValue(self, sAttributeName: str) → float¶ Gets a double attribute from the current node in an XML tree being parsed.
Note
Return is 0.0 if attribute name is not found.
Parameters: sAttributeName (str) – the attribute name (a string) Returns: output (float) – the value (a double)
-
getCurrentNodeDoubleValue(self) → float¶ Gets the current node double value in an XML tree being parsed.
Returns: output (float) – the node value (a double)
-
getCurrentNodeFloatAttributeValue(self, sAttributeName: str) → float¶ Gets a float attribute from the current node in an XML tree being parsed.
Note
Return is 0.0f if attribute name is not found.
Parameters: sAttributeName (str) – the attribute name (a string) Returns: output (float) – the value (a float)
-
getCurrentNodeFloatValue(self) → float¶ Gets the current node float value in an XML tree being parsed.
Returns: output (float) – the node value (a float)
-
getCurrentNodeIntAttributeValue(self, sAttributeName: str) → int¶ Gets an int attribute from the current node in an XML tree being parsed.
Note
Return is 0 if attribute name is not found.
Parameters: sAttributeName (str) – the attribute name (a string) Returns: output (int) – the value (an int)
-
getCurrentNodeIntValue(self) → int¶ Gets the current node int value in an XML tree being parsed.
Returns: output (int) – the node value (an int)
-
getCurrentNodeLONGLONGValue(self) → int¶ Gets the current node int64_t value in an XML tree being parsed.
Returns: output (int) – the node value (a int64_t)
-
getCurrentNodeName(self) → str¶ Returns: output (str) –
-
getCurrentNodeShortAttributeValue(self, sAttributeName: str) → int¶ Gets a short attribute from the current node in an XML tree being parsed.
Note
Return is 0 if attribute name is not found.
Parameters: sAttributeName (str) – the attribute name (a string) Returns: output (int) – the value (a short)
-
getCurrentNodeShortValue(self) → int¶ Gets the current node short value in an XML tree being parsed.
Returns: output (int) – the node value (a short)
-
getCurrentNodeULONGLONGValue(self) → int¶ Gets the current node uint64_t value in an XML tree being parsed.
Returns: output (int) – the node value (an uint64_t)
-
getCurrentNodeUnsignedIntAttributeValue(self, sAttributeName: str) → int¶ Gets an unsigned int attribute from the current node in an XML tree being parsed.
Note
Return is 0 if attribute name is not found.
Parameters: sAttributeName (str) – the attribute name (a string) Returns: output (int) – the value (an int)
-
getCurrentNodeUnsignedIntValue(self) → int¶ Gets the current node unsigned int value in an XML tree being parsed.
Returns: output (int) – the node value (an int)
-
getCurrentNodeUnsignedShortAttributeValue(self, sAttributeName: str) → int¶ Gets an unsigned short attribute from the current node in an XML tree being parsed.
Note
Return is 0 if attribute name is not found.
Parameters: sAttributeName (str) – the attribute name (a string) Returns: output (int) – the value (an short)
-
getCurrentNodeUnsignedShortValue(self) → int¶ Gets the current node unsigned short value in an XML tree being parsed.
Returns: output (int) – the node value (an short)
-
getCurrentNodeValue(self) → str¶ Returns: output (str) –
-
getNodeBoolValueFromCurrentNode(self, sElementName: str) → bool¶ Gets a boolean element from the current node in an XML tree being parsed.
Note
Return is false if element name is not valid nor found.
Parameters: sElementName (str) – the element name (a string) Returns: output (bool) – the value (a bool)
-
getNodeCount(self, pXpath: str) → int¶ Returns the nodes count according to an XPATH.
Parameters: pXpath (str) – the XPATH to search for (a string) Returns: output (int) – the number of nodes found (an int)
-
getNodeDoubleValueFromCurrentNode(self, sElementName: str) → float¶ Gets a double element from the current node in an XML tree being parsed.
Note
Return is 0.0f if element name is not valid nor found.
Parameters: sElementName (str) – the element name (a string) Returns: output (float) – the value (a double)
-
getNodeFloatValueFromCurrentNode(self, sElementName: str) → float¶ Gets a float element from the current node in an XML tree being parsed.
Note
Return is 0.0f if element name is not valid nor found.
Parameters: sElementName (str) – the element name (a string) Returns: output (float) – the value (a float)
-
getNodeIntValueFromCurrentNode(self, sElementName: str) → int¶ Gets an int element from the current node in an XML tree being parsed.
Note
Return is 0 if element name is not valid nor found.
Parameters: sElementName (str) – the element name (a string) Returns: output (int) – the value (an int)
-
getNodeLONGLONGValueFromCurrentNode(self, sElementName: str) → int¶ Gets a int64_t element from the current node in an XML tree being parsed.
Note
Return is 0 if element name is not valid nor found.
Parameters: sElementName (str) – the element name (a string) Returns: output (int) – the value (a int64_t)
-
getNodeShortValueFromCurrentNode(self, sElementName: str) → int¶ Gets a short element from the current node in an XML tree being parsed.
Note
Return is 0 if element name is not valid nor found.
Parameters: sElementName (str) – the element name (a string) Returns: output (int) – the value (a short)
-
getNodeULONGLONGValueFromCurrentNode(self, sElementName: str) → int¶ Gets a uint64_t element from the current node in an XML tree being parsed.
Note
Return is 0 if element name is not valid nor found.
Parameters: sElementName (str) – the element name (a string) Returns: output (int) – the value (an uint64_t)
-
getNodeUnsignedIntValueFromCurrentNode(self, sElementName: str) → int¶ Gets an unsigned int element from the current node in an XML tree being parsed.
Note
Return is 0 if element name is not valid nor found.
Parameters: sElementName (str) – the element name (a string) Returns: output (int) – the value (an int)
-
getNodeUnsignedShortValueFromCurrentNode(self, sElementName: str) → int¶ Gets an unsigned short element from the current node in an XML tree being parsed.
Note
Return is 0 if element name is not valid nor found.
Parameters: sElementName (str) – the element name (a string) Returns: output (int) – the value (an short)
-
getNodeValueFromCurrentNode(self, pXpath: str) → str¶ Parameters: pXpath (str) – Returns: output (str) –
-
getVersionFromFile(self, filename: str) → str¶ Returns the version number stored in a session file.
Parameters: filename (str) – the file name (a string) Returns: output (str) – the version number (a string)
-
loadObjectsFromFile(self, filename: str) → None¶ Loads objects from a file.
Note
All ORS objects can save themselves to file, in an XML format.
Parameters: filename (str) – the file name (a string)
-
loadObjectsFromXML(self, anXML: str) → None¶ Loads objects from an XML string.
Note
All ORS objects can save themselves in an XML format.
Parameters: anXML (str) – the XML (a string)
-
none()¶ Loader.__init__() -> Loader
-
pop(self) → None¶ Goes up one level in an XML tree being parsed.
-
setCurrentNode(self, pXpath: str) → bool¶ Selects a node in an XML tree being parsed.
Parameters: pXpath (str) – an XPath (a string) Returns: output (bool) – true if successful, false otherwise
-
setCurrentNodeFromCurrentNode(self, pXpath: str) → bool¶ Selects a node in an XML tree, under the current node.
Note
The node is only searched under the current node of the tree.
Parameters: pXpath (str) – the node name (a string) Returns: output (bool) – true if successful, false otherwise
-
setCurrentNodeToCurrentNodeNextSibling(self) → bool¶ Moves to the next node equivalent to the current node, in an XML tree being parsed.
Returns: output (bool) – true if successful, false otherwise
-
setXMLString(self, aXMLString: str) → bool¶ Gives an XML string to the loader and DOMifies it.
Parameters: aXMLString (str) – an XML string (a string) Returns: output (bool) – true if the XML is valid, false otherwise
-
setXMLStringFromFilename(self, filename: str) → bool¶ Gives an XML string from a file to the loader and DOMifies it.
Parameters: filename (str) – a filename containing the XML string (a string) Returns: output (bool) – true if the XML is valid, false otherwise
-
LookupTable¶
-
class
ORSModel.ors.LookupTable¶ Bases:
ORSModel.ors.Nodebrief_description: A Lookup Table that can adopt predefined and/or custom looks. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: August 2005 see: VisualMesh::setLookupTable(), Vector3::setLookupTable() A Lookup Table that can adopt predefined and/or custom looks. It contains the ambiant, power, diffuse, emissive and specular properties.
-
appendColor(self, IColor: ORSModel.ors.Color) → None¶ Add a color at the end of the table.
Parameters: IColor (ORSModel.ors.Color) –
-
build(self) → None¶ Builds the LUT according to its settings.
-
buildDiscreteLUT(self) → None¶ Build Discrete lut control point array from color table.
Note
User-defined LUTs use control points.
-
copyFrom(self, ILookupTable: ORSModel.ors.LookupTable) → None¶ Copy internal parameters from the given lookup table.
Parameters: ILookupTable (ORSModel.ors.LookupTable) –
-
fillRGBAColorArray(self, startIndex: int, endIndex: int, colorsArray: int, subtractFactors: int) → None¶ Dump the lut in arrays.
Parameters: - startIndex (int) – startIndex
- endIndex (int) – endIndex
- colorsArray (bytes) – colorsArray an unsigned char* array of size 4*getTableSize()
- subtractFactors (bytes) – subtractFactors an unsigned char* array of size getTableSize()
-
findControlPointIndexForPosition(self, pX: float) → int¶ Searches for a control point according to its position.
Parameters: pX (float) – the X coordinate of the control point (a double) Returns: output (int) – the index control point (a uint32_t)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getColorAtIndex(self, inValue: int) → Color¶ Get color at a given index.
Parameters: inValue (int) – the color index (in range [0, getTableSize()-1] ) (a uint32_t) Returns: output (ORSModel.ors.Color) –
-
getColorAtPosition(self, position: float) → Color¶ Gets the color at a given position.
Note
This method returns a color at a position normalized between 0 and 1. If the position does not exactly match an existing control point, the returned color will be an interpolation of the two closest colors.
Parameters: position (float) – the position (a double, see note) Returns: output (ORSModel.ors.Color) – the color (a Color)
-
getColorFromPosition(self, position: float, aColor: ORSModel.ors.Color) → None¶ Gets the color at a given position.
Note
This method returns the color at a position normalized between 0 and 1. If the position does not exactly match an existing control point, the returned color will be an interpolation of the two closest colors.
Parameters: - position (float) – the position (a double, see note)
- aColor (ORSModel.ors.Color) – a Color object
-
getControlPointColor(self, index: int) → Color¶ Retrieves the color of a control point.
Parameters: index (int) – the control point index (a uint32_t) Returns: output (ORSModel.ors.Color) – the color (an Color)
-
getControlPointCount(self) → int¶ Retrieves the total number of control points in the LUT.
Returns: output (int) – the number of control points (a uint32_t)
-
getControlPointPositionX(self, index: int) → float¶ Retrieves the X coordinate of a control point.
Parameters: index (int) – the control point index (a uint32_t) Returns: output (float) – the X coordinate of the control point (a double)
-
getControlPointPositionY(self, index: int) → float¶ Retrieves the Y coordinate of a control point.
Parameters: index (int) – the control point index (a uint32_t) Returns: output (float) – the Y coordinate of the control point (a double)
-
getGamma(self) → float¶ Gets the gamma value.
Returns: output (float) – the gamma value (a double)
-
getIsDiscrete(self) → bool¶ Get if the lookup table is discrete.
Returns: output (bool) –
-
getTableSize(self) → int¶ Get the table size.
Returns: output (int) – the table size (a uint32_t)
-
insertControlPointAt(self, index: int, x: float, y: float, IColor: ORSModel.ors.Color) → None¶ Inserts a control point.
Parameters: - index (int) – the control point index (a uint32_t)
- x (float) – the X coordinate of the control point (a double)
- y (float) – the Y coordinate of the control point (a double)
- IColor (ORSModel.ors.Color) – the color (a Color)
-
none()¶ LookupTable.__init__() -> LookupTable
-
removeAllControlPoints(self) → None¶ Removes all LUT control points.
-
removeColorAtIndex(self, nIndex: int) → bool¶ Removes the color at the given index.
Parameters: nIndex (int) – Returns: output (bool) –
-
removeControlPointAt(self, index: int) → None¶ Removes a control point.
Parameters: index (int) – the control point index (a uint32_t)
-
setColorAtIndex(self, nIndex: int, IColor: ORSModel.ors.Color) → None¶ Sets the color at the given index.
Parameters: - nIndex (int) –
- IColor (ORSModel.ors.Color) –
-
setColorAtPosition(self, position: float, IColor: ORSModel.ors.Color) → None¶ Sets the color at a given position.
Note
The position is normalized between 0 and 1. The color that will be changed will be the closest control point color.
Parameters: - position (float) – the position (a double, see note)
- IColor (ORSModel.ors.Color) –
-
setColorForIndexRange(self, nStartIndex: int, nEndIndex: int, IColor: ORSModel.ors.Color) → None¶ Set color at a given index range.
Parameters: - nStartIndex (int) – the color start index (in range [0, getTableSize()-1] ) (a uint32_t)
- nEndIndex (int) – the color end index (in range [0, getTableSize()-1] ) (a uint32_t)
- IColor (ORSModel.ors.Color) – the color (a Color)
-
setControlPointColor(self, index: int, IColor: ORSModel.ors.Color) → None¶ Changes the color of a control point.
Parameters: - index (int) – the control point index (a uint32_t)
- IColor (ORSModel.ors.Color) – the color (a Color)
-
setControlPointPosition(self, index: int, pX: float, pY: float) → None¶ Changes the position of a control point.
Parameters: - index (int) – the control point index (a uint32_t)
- pX (float) – the new X coordinate of the control point (a double)
- pY (float) – the new Y coordinate of the control point (a double)
-
setGamma(self, value: float) → None¶ Sets the gamma value.
Parameters: value (float) – the gamma value (a double)
-
setIsDiscrete(self, bDiscrete: bool) → None¶ Sets the lookup table as discrete.
Parameters: bDiscrete (bool) –
-
setRampBMPFile(self, filepath: str) → None¶ Sets the LUT to BMP file.
Parameters: filepath (str) –
-
setRampGrayScale(self) → None¶ Sets the LUT to be gray scale.
Note
Gray scale LUTs divide the color range in 255 gray tones.
-
setRampRainbow(self) → None¶ Sets the LUT to be rainbow.
Note
Rainbow LUTs divide the color range in 4 sections.
-
setRampUserDefined(self) → None¶ Sets the LUT to be user-defined.
Note
User-defined LUTs use control points.
-
setTableSize(self, size: int) → None¶ Sets the table size.
Parameters: size (int) –
-
Managed¶
-
class
ORSModel.ors.Managed¶ Bases:
ORSModel.ors.ORSBaseClassbrief_description: The “mother” of all author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005
-
addCallbackToEvent(self, anEventName: str, sCallbackName: str, callbackData: int) → bool¶ Adds a callback subscription to an event.
Note
The callback name for a given event needs to be unique for that event, i.e. no two callbacks for a given event can have the same name.
Parameters: - anEventName (str) – name of the event to subscribe to (a string)
- sCallbackName (str) – callback name (a string)
- callbackData (int) – a pointer to a ORS_EVENT_CALLBACK_INFO structure
Returns: output (bool) – true if subscription succeeded, false otherwise
-
addToDeleteSet(self, anIObject: ORSModel.ors.Managed) → None¶ Add an object to the delete set.
Note
All objects have a delete set, which designates those objects that should also be deleted when the receiver gets deleted.
Parameters: anIObject (ORSModel.ors.Managed) – an object (a Managed)
-
applyPreferences()¶ Helper for setting the attribute of the object following the preferences
-
atomicLoad(sFilename: str, bPreserveIdentity: bool) → Managed¶ Creates an object from a file where an object was save.
Parameters: - sFilename (str) – path of the file to load
- bPreserveIdentity (bool) – if true, preserves the identity of the object, false otherwise
Returns: output (Managed) – a managed object, or none() if the load fails
-
atomicLoadFrom(self, anXML: str) → None¶ Loads an object from an XML string.
Parameters: anXML (str) – Managed.atomicLoadFrom(self, buffer: int, nBytes: int) -> None
Loads an object from a buffer. Used for python pickling.
Parameters: - buffer (bytes) – the buffer
- nBytes (int) – the number of bytes in the buffer (a 64 bit unsigned int)
-
atomicLoadSpecificNode(self, aFilename: str, aXPathOfTheNodeToLoad: str) → bool¶ Loads an object from a file containing several objects.
Parameters: - aFilename (str) –
- aXPathOfTheNodeToLoad (str) –
Returns: output (bool) –
-
atomicSave(self, aFilename: str, isTemporary: bool) → int¶ Saves the object to a file.
Parameters: - aFilename (str) – path of the file to save
- isTemporary (bool) – if true, try to keep file in memory
Returns: output (int) – 0 if successful, otherwise an error code
-
copy(self) → Managed¶ Returns a copy of the managed.
Note
Only the immediate attributes of the managed are copied. The graph surrounding the new managed is the same one as the source managed.
Note
You can type the return value of this method to any subclass of Managed, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be NULL.
Returns: output (ORSModel.ors.Managed) – a new managed (a Managed)
-
deleteObject(self) → None¶ Explicitly deletes the core object wrapped by this Interface object.
-
deleteObjectAndAllItsChildren(self) → None¶ Explicitly deletes the core object wrapped by this Interface object, along with all its children.
-
getAllGroupsContaining(self, anIObject: ORSModel.ors.Managed) → List¶ Gets all the groups that contain the given object.
Parameters: anIObject (ORSModel.ors.Managed) – Returns: output (ORSModel.ors.List) –
-
classmethod
getAllInstances()¶
-
getAllInstancesOf(pProgId: str) → List¶ Gathers all existing objects of the specified class.
Parameters: pProgId (str) – Returns: output (ORSModel.ors.List) –
-
classmethod
getAllObjectsOfClass(cls_name)¶
-
getAllObjectsOfClassAndPrivateTitle(pProgId: str, pPrivateTitle: str) → List¶ Gathers all existing objects of the specified class, that have a matching private title.
Parameters: - pProgId (str) – name of the class (a string)
- pPrivateTitle (str) – private title to search for (a string)
Returns: output (ORSModel.ors.List) – all the objects that match the search criteria (a List)
-
getAllObjectsOfClassAndUserData(pProgId: str, userDataKey: str, userDataValue: str) → List¶ Gathers all existing objects of the specified class, that have a matching user data.
Parameters: - pProgId (str) – name of the class (a string)
- userDataKey (str) – key of the user data (a string)
- userDataValue (str) – value to look for (a string)
Returns: output (ORSModel.ors.List) – all the objects that match the search criteria (a List)
-
classmethod
getAllSubclasses(outputCollection=None)¶
-
getAtomicTextRepresentation(self, bSelfContained: bool) → str¶ Retrieves the object’s atomic text representation.
Parameters: bSelfContained (bool) – Returns: output (str) –
-
getBinaryUserInfo(self, pTag: str) → None¶ Retrieves a user defined binary value. Typed as void* for sip, but it’s in reality an unsigned char*.
Note
If the key doesn’t exist, nullptr is returned
Parameters: pTag (str) – key of the data (a string)
-
getBinaryUserInfoAsBytes(name)¶
-
getBinaryUserInfoSize(self, pTag: str) → int¶ Retrieves the size of a user defined binary value.
Note
If the key doesn’t exist, 0 is returned
Parameters: pTag (str) – key of the data (a string) Returns: output (int) – the size of the data (a uint32_t)
-
getCallbacksEnabled(self) → bool¶ Queries the object to know if its callbacks are enabled or disabled.
Returns: output (bool) – true if callbacks are enabled, false otherwise
-
getCanBeDeleted(self) → bool¶ Queries the object to know if it can safely be deleted.
Returns: output (bool) –
-
classmethod
getClassDenomination()¶
-
static
getClassFromProgId(progId)¶
-
getClassName(self) → str¶ Retrieves the class name of the core object wrapped by this Interface object.
Returns: output (str) – the class name (a string)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCreationTime(self) → int¶ Returns the time Number of seconds since Jan 1 2000 of creation of this object.
Returns: output (int) – a uint32_t
-
getDataDirtySignature()¶ Gets the current dirty signature for the flag OrsDataDirty
Returns: dataDirtySignature (int) – the dirty signature
-
getDirtySignature(self, dirtyFlag: str) → int¶ Gets the current dirty signature.
Note
Objects can be dirty for several aspects, see the ors_def.h file for the different dirty aspects.
Parameters: dirtyFlag (str) – dirty flag name (a string, see note below) Returns: output (int) – dirty signature (a uint32_t)
-
getEventCallbackEnabled(self, sEventName: str, sCallbackName: str) → bool¶ Gets the enabled state of a callback subscription to an event.
Parameters: - sEventName (str) – event name (a string)
- sCallbackName (str) – callback name (a string)
Returns: output (bool) – true if callback is enabled, false if disabled or if the callback subscription did not exist
-
getGUID(self) → str¶ Retrieves the GUID of the core object.
Note
The GUID is the unique identifier of the object. No two objects can have the same GUID. Once you have an object’s GUID, at any time you can obtain a reference to that object via its GUID, given that the object is still alive.
Returns: output (str) –
-
getGeometryDirtySignature()¶ Gets the current dirty signature for the flag OrsGeometryDirty
Returns: geometryDirtySignature (int) – the dirty signature
-
getHasCallbacksForEvent(self, anEventName: str) → bool¶ Checks if the receiver has any callbacks for an event.
Parameters: anEventName (str) – name of the event (a string) Returns: output (bool) –
-
getIsDirty(self, dirtyFlag: str) → bool¶ Gets if the object is dirty for a specific dirty flag.
Parameters: dirtyFlag (str) – dirty flag name (a string, see note below) Returns: output (bool) – true if object is dirty, false otherwise
-
getIsDirtyAnyDirtyFlag(self) → bool¶ Gets if the object is dirty for any of the dirty flags.
Returns: output (bool) – true if object is dirty, false otherwise
-
getIsEqualTo(self, aManaged: ORSModel.ors.Managed) → bool¶ Checks if the two objects are equal.
Parameters: aManaged (ORSModel.ors.Managed) – an object to compare with (a Managed) Returns: output (bool) – true if the receiver and the argument are equal (class dependent), false otherwise
-
getIsIdentityPreservedForPickling(self) → bool¶ Returns True if the GUID is preserved when pickling and unpickling an object.
Returns: output (bool) – Returns True if the GUID is preserved when pickling and unpickling an object
-
getIsInstanceOf(self, pProgId: str) → bool¶ Queries the object to know if it is an instance of a certain class.
Parameters: pProgId (str) – Returns: output (bool) –
-
getIsInstanceOfAtLeastOneClasses(progIdList)¶
-
getIsRepresentable(self) → bool¶ Queries the object to know if it is representable.
Returns: output (bool) –
-
getIsSameObjectAs(self, anObject: ORSModel.ors.Managed) → bool¶ Checks to see if the receiver wraps the same underlying object as the supplied argument.
Parameters: anObject (ORSModel.ors.Managed) – an object to compare with (a Managed) Returns: output (bool) – true if underlying object is the same for both the receiver and the argument, false otherwise
-
classmethod
getIsSubclassOf(parentClass)¶
-
getIsToBeKeptAliveUntilExit(self) → bool¶ Queries the object to know if it is permanent for the life of the application.
Note
Permanent objects survive a new session, i.e. they live until the application is terminated.
Returns: output (bool) – true if object is permanent, false otherwise
-
getIsToBeSaved(self) → bool¶ Queries the object to know if it should be saved in a session file.
Returns: output (bool) – true if object should be saved, false otherwise
-
getObjectWithGUID(guid: str) → Managed¶ Retrieves an object from its GUID.
Parameters: guid (str) – a GUID (a string) Returns: output (ORSModel.ors.Managed) – An object or none if object is not found
-
getPrivateTitle(self) → str¶ Gets the private title of the object.
Note
The private title is never shown in the application, but is a means by which an object can be found (getAllObjectsOfClassAndPrivateTitle for example).
Returns: output (str) –
-
getPropertyDirtySignature()¶ Gets the current dirty signature for the flag OrsPropertyDirty
Returns: propertyDirtySignature (int) – the dirty signature
-
getPythonRepresentation(self) → str¶ Gets a Python evaluable string representation.
Returns: output (str) – The object’s representation (a string)
-
getReferenceCount(self) → int¶ Returns the count of references to the object.
Returns: output (int) – the count of references (an int)
-
getTitle(self) → str¶ Gets the title of the object.
Returns: output (str) – the title (a string)
-
getUserInfo(self, pTag: str) → str¶ Retrieves a user defined value.
Note
If the key doesn’t exist an empty string is returned.
Parameters: pTag (str) – key of the data (a string) Returns: output (str) – the data (a string)
-
getVisibilityDirtySignature()¶ Gets the current dirty signature for the flag OrsVisibilityDirty
Returns: visibilityDirtySignature (int) – the dirty signature
-
isManaged(self) → bool¶ Returns: output (bool) –
-
isNone(self) → bool¶ check if the object is none
Returns: output (bool) –
-
isNotNone(self) → bool¶ check if the object is Not none
Returns: output (bool) –
-
none()¶ Managed.__init__() -> Managed
-
publish()¶ Sets an object as representable and notifies the Dragonfly UI of a new available object
-
removeBinaryUserInfo(self, pTag: str) → None¶ Removes a user defined binary value.
Parameters: pTag (str) – key name of the binary value (a string)
-
removeCallbackFromEvent(self, sEventName: str, sCallbackName: str) → bool¶ Removes a callback subscription to an event.
Parameters: - sEventName (str) – name of the callback event (a string)
- sCallbackName (str) – name of the callback (a string)
Returns: output (bool) – true callback existed, false otherwise
-
removeFromDeleteSet(self, anIObject: ORSModel.ors.Managed) → None¶ Remove an object from the delete set.
Note
The delete set is a list of objects that are to be deleted when the receiver is deleted.
Parameters: anIObject (ORSModel.ors.Managed) – object to be removed from the delete set (a Managed)
-
removeUserInfo(self, pTag: str) → None¶ Removes a user defined value.
Parameters: pTag (str) – key of the data (a string)
-
setAsTemporaryObject(isTemporaryObject=True)¶ Helper for setting useful properties when marking an object as a (non-)temporary object.
Parameters: isTemporaryObject (bool) – if True, the object will be set as temporary (not representable, not to be saved, callbacks disabled). Otherwise, these properties are set as the opposite.
-
setBinaryUserInfo(self, pTag: str, pValue: int, iDataSize: int) → None¶ Sets a user defined binary value.
Note
Objects can carry user defined data in the form of strings or binary data.
Parameters: - pTag (str) – key of the data (a string)
- pValue (bytes) – the data (an unsigned char* buffer)
- iDataSize (int) – the size of the data (a uint32_t)
-
setCallbacksEnabled(self, enabled: bool) → None¶ Sets the object’s callbacks to be enabled or not.
Note
When an object’s callbacks are disabled, absolutely no callbacks are triggered from the receiver.
Parameters: enabled (bool) – true to enable callbacks, false otherwise
-
setCanBeDeleted(self, bFlag: bool) → None¶ Sets the object to be deletable or not.
Parameters: bFlag (bool) –
-
setDataDirty()¶ Calls for a setDirty with the flag OrsDataDirty
-
setDirty(self, dirtyFlag: str) → None¶ Sets the object as being dirty for a given aspect.
Note
A dirty object is an object that has changed, giving its observers a chance to refresh their view on the object. Several aspects of an object can be dirty, see ORS_def.h for dirty signature flags.
Parameters: dirtyFlag (str) – dirty flag name (a string)
-
setEventCallbackEnabled(self, sEventName: str, sCallbackName: str, bValue: bool) → bool¶ Enables/disables a callback subscription to an event.
Note
Works for all callback types (object, class and global)
Parameters: - sEventName (str) – event name (a string)
- sCallbackName (str) – callback name (a string)
- bValue (bool) – true to enable the callback, false to disable it
Returns: output (bool) – true if callback subscription existed, false otherwise
-
setGeometryDirty()¶ Calls for a setDirty with the flag OrsGeometryDirty
-
setIdentityIsPreservedForPickling(self, value: bool) → None¶ Set to True if the GUID is to be preserved when pickling and unpickling an object.
Parameters: value (bool) –
-
setIsNotDirty(self) → None¶ Sets the object as not being dirty for all dirty flags.
-
setIsRepresentable(self, isRepresentable: bool) → None¶ Sets the object to be representable or not.
Note
Non representable objects don’t appear in lists and such, the implicit meaning is that these objects are transient and temporary.
Parameters: isRepresentable (bool) – true to make the object representable, false otherwise
-
setIsToBeKeptAliveUntilExit(self, pFlag: bool) → None¶ Sets the object to be permanent for the life of the application.
Note
Permanent objects survive a new session, i.e. they live until the application is terminated.
Parameters: pFlag (bool) – true to make the object permanent, false otherwise
-
setIsToBeSaved(self, pIsToBeSaved: bool) → None¶ Sets the object to be saved to session files or not.
Parameters: pIsToBeSaved (bool) – true to cause the object to be saved to session files, false otherwise
-
setPrivateTitle(self, newPrivateTitle: str) → None¶ Sets the private title of the object.
Note
The private title can later be used to find a reference to that object, given that it’s still alive.
Parameters: newPrivateTitle (str) – a title (a string)
-
setPropertyDirty()¶ Calls for a setDirty with the flag OrsPropertyDirty
-
setTitle(self, newVal: str) → None¶ Sets the title of the object.
Parameters: newVal (str) –
-
setUserInfo(self, pTag: str, pValue: str) → None¶ Sets a user defined value.
Note
Stores the key/value pair in an internal dictionary. If the key already exists its previous value is overwritten.
Parameters: - pTag (str) – a key name (a string)
- pValue (str) – a value (a string)
-
setVisibilityDirty()¶ Calls for a setDirty with the flag OrsVisibilityDirty
-
triggerClassEvent(self, sEventName: str) → bool¶ Triggers a class event.
Parameters: sEventName (str) – Returns: output (bool) –
-
unpublish()¶ Sets an object as non-representable and notifies the Dragonfly UI of a loss of the availability of the object.
-
MassiveMarchingAutomata¶
-
class
ORSModel.ors.MassiveMarchingAutomata¶ Bases:
ORSModel.ors.Unmanaged-
cleanSpeedMapChannel(self, outputChannel: ORSModel.ors.Channel) → None¶ Removes boundaries or non reached value from a Speed map channel.
Parameters: outputChannel (ORSModel.ors.Channel) – a distance map channel (an Channel)
-
createDistanceMap(self, lOutputChannelDistanceMap: ORSModel.ors.Channel, lOutputChannelTraceBack: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel, nbIteration: int) → None¶ Parameters: - lOutputChannelDistanceMap (ORSModel.ors.Channel) –
- lOutputChannelTraceBack (ORSModel.ors.Channel) –
- lOutputChannelLabel (ORSModel.ors.Channel) –
- nbIteration (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getEuclideanBias(self) → float¶ Gets the Euclidean bias that will be the minimumDijkstra distance between voxels.
Note
Neighbors of distance 1 will have a bias of spacialTerm
Note
Neighbors of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm
Note
Neighbors of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm
Returns: output (float) – the minimum distance between voxels (a double)
-
getNeighborCount(self) → int¶ Returns: output (int) –
-
getROICount(self) → int¶ Returns the number of ROIs that have been set as sources.
Note
A maximum of 10 ROI can be provided.
Returns: output (int) – the number of ROIs that have been provided (an char)
-
getVolumeROI(self, index: int) → ROI¶ Retrieves a particularROI from the index specified slot.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: index (int) – the slot index (an unsigned char) Returns: output (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI), or NULL if no ROI is at that slot
-
none()¶ MassiveMarchingAutomata.__init__() -> MassiveMarchingAutomata
-
resetVolumeROIs(self) → None¶ Empties all the sourceROI slots.
-
setEuclideanBias(self, EuclideanBias: float) → None¶ Provides an Euclidean bias that will be the minimumDijkstra distance between voxels.
Note
Neighbors of distance 1 will have a bias of spacialTerm.
Note
Neighbors of distance sqrt(2) will have a bias of sqrt(2)*spacialTerm.
Note
Neighbor of distance sqrt(3) will have a bias of sqrt(3)*spacialTerm.
Parameters: EuclideanBias (float) – the minimum distance between voxels (a double)
-
setInputChannelAndWorkingArea(self, inputChannel: ORSModel.ors.Channel, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, currentT: int) → None¶ Sets the channel that will be used by the MassiveMarching algorithm to calculate distance.
Note
The min and max boundaries must not describe a space bigger than the input channel.
Parameters: - inputChannel (ORSModel.ors.Channel) – the input channel (an Channel)
- minX (int) – the minimum X index in the input channel (a uint32_t)
- minY (int) – the minimum Y index in the input channel (a uint32_t)
- minZ (int) – the minimum Z index in the input channel (a uint32_t)
- maxX (int) – the maximum X index in the input channel (a uint32_t)
- maxY (int) – the maximum Y index in the input channel (a uint32_t)
- maxZ (int) – the maximum Z index in the input channel (a uint32_t)
- currentT (int) – the T index (a uint32_t)
-
setNeighborCountTo18(self) → None¶
-
setNeighborCountTo26(self) → None¶
-
setNeighborCountTo6(self) → None¶
-
setVolumeROI(self, index: int, aVolROI: ORSModel.ors.ROI) → None¶ Fills a particularROI slot to be used as a source for the Dijkstra algorithm.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: - index (int) – the slot index (an unsigned char)
- aVolROI (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI)
-
Material¶
-
class
ORSModel.ors.Material¶ Bases:
ORSModel.ors.Nodebrief_description: Represents the material of a visual ( author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: Visual::setMaterial(), Visual::getMaterial() Represents a material that can be used with any Visual object. It contains the ambiant, power, diffuse, emissive and specular properties.
-
getAmbiant(self) → Color¶ Gets the ambiant color of the material.
Returns: output (ORSModel.ors.Color) – ambiant (a Color)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getDiffuse(self) → Color¶ Gets the diffuse color of the material.
Returns: output (ORSModel.ors.Color) – diffuse (a Color)
-
getEmissive(self) → Color¶ Gets the emissive color of the material.
Returns: output (ORSModel.ors.Color) – an emissive (a Color)
-
getPower(self) → float¶ Gets the power property of the material.
Returns: output (float) – power value (a float)
-
getShadowIntensity(self) → float¶ Gets the shadow intensity.
Note
Should be between 0.0 and 1.0.
Returns: output (float) – an intensity factor (a float)
-
getSpecular(self) → Color¶ Gets the specular color of the material.
Returns: output (ORSModel.ors.Color) – specular (a Color)
-
getTexture(self, stage: int) → str¶ Parameters: stage (int) – Returns: output (str) –
-
getTextureScale(self) → float¶ Gets the texture scale factor.
Returns: output (float) – the scale factor (a float)
-
none()¶ Material.__init__() -> Material
-
setAmbiant(self, IColor: ORSModel.ors.Color) → None¶ Sets the ambiant color, in Red-Green-Blue.
Note
Each color value goes between 0 (none) and 1 (full).
Parameters: IColor (ORSModel.ors.Color) – a color object (a Color)
-
setDiffuse(self, IColor: ORSModel.ors.Color) → None¶ Sets the diffuse color, in Red-Green-Blue.
Note
Each color value goes between 0 (none) and 1 (full).
Parameters: IColor (ORSModel.ors.Color) – a color object (a Color)
-
setEmissive(self, IColor: ORSModel.ors.Color) → None¶ Sets the emissive color, in Red-Green-Blue.
Note
Each color value goes between 0 (none) and 1 (full).
Parameters: IColor (ORSModel.ors.Color) – a color object (a Color)
-
setPower(self, value: float) → None¶ Sets the power property of the material.
Parameters: value (float) – a power value (a float)
-
setShadowIntensity(self, value: float) → None¶ Sets the shadow intensity.
Note
Should be between 0.0 and 1.0.
Parameters: value (float) – an intensity factor (a float)
-
setSpecular(self, IColor: ORSModel.ors.Color) → None¶ Sets the specular color, in Red-Green-Blue.
Note
Each color value goes between 0 (none) and 1 (full).
Parameters: IColor (ORSModel.ors.Color) – a color object (a Color)
-
setTexture(self, filename: str, stage: int) → None¶ Sets the texture from a texture file.
Note
Stages are valued between 0 and 7.
Parameters: - filename (str) – a file name (a string)
- stage (int) – a stage (a LONG)
-
setTextureScale(self, value: float) → None¶ Sets the texture scale factor.
Parameters: value (float) – a scale factor (a float)
-
Matrix4x4¶
-
class
ORSModel.ors.Matrix4x4¶ Bases:
ORSModel.ors.Unmanagedbrief_description: A wrapper to a 3D matrix. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005
-
asRotationMatrix(self, inputVector: ORSModel.ors.Vector3) → None¶ As rotation matrix from quaternion.
Parameters: inputVector (ORSModel.ors.Vector3) –
-
copy(self) → Matrix4x4¶ Gets a copy.
Returns: output (ORSModel.ors.Matrix4x4) –
-
createFromPythonRepresentation(aPythonRepresentation: str) → Matrix4x4¶ Create a Matrix from a python representation static method.
Parameters: aPythonRepresentation (str) – aPythonRepresentation (an wstring) Returns: output (ORSModel.ors.Matrix4x4) – a Matrix4x4 (Matrix4x4)
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ set a Matrix from a python representation
Parameters: aPythonRepresentation (str) – aPythonRepresentation (an wstring) Returns: output (bool) – true if the parsing worked, else false (a bool)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getInverted(self) → Matrix4x4¶ Gets an inverted matrix.
Note
The receiver is not affected.
Returns: output (ORSModel.ors.Matrix4x4) – an inverted matrix (an Matrix4x4)
-
getIsEqualTo(self, aMatrix4x4: ORSModel.ors.Matrix4x4) → bool¶ Checks for equality to another matrix.
Parameters: aMatrix4x4 (ORSModel.ors.Matrix4x4) – a matrix (a Matrix4x4) Returns: output (bool) – TRUE if the matrices are equal, FALSE otherwise
-
getIsIdentity(self) → bool¶ Tests for identity.
Returns: output (bool) –
-
getMultiply(self, IMatrix: ORSModel.ors.Matrix4x4) → Matrix4x4¶ Matrix4x4 product.
Parameters: IMatrix (ORSModel.ors.Matrix4x4) – Returns: output (ORSModel.ors.Matrix4x4) –
-
getPythonRepresentation(self) → str¶ Gets a Python evaluable string representation.
Returns: output (str) –
-
getScale(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getTransformedBoundedPlane(self, inputBoundedPlane: ORSModel.ors.Rectangle) → Rectangle¶ Applies a matrix transformation to a bounded plane.
Parameters: inputBoundedPlane (ORSModel.ors.Rectangle) – Returns: output (ORSModel.ors.Rectangle) –
-
getTransformedBox(self, inputBox: ORSModel.ors.Box) → Box¶ Applies a matrix transformation to a box.
Parameters: inputBox (ORSModel.ors.Box) – Returns: output (ORSModel.ors.Box) –
-
getTransformedCoordinate(self, inputCoordinate: ORSModel.ors.Vector3) → Vector3¶ Applies a matrix transformation to an augmented vector ([x, y, z, 1]).
Parameters: inputCoordinate (ORSModel.ors.Vector3) – Returns: output (ORSModel.ors.Vector3) –
-
getTransformedLine(self, inputLine: ORSModel.ors.Line) → Line¶ Applies a matrix transformation to a line.
Parameters: inputLine (ORSModel.ors.Line) – Returns: output (ORSModel.ors.Line) –
-
getTransformedLineSegment(self, inputLineSegment: ORSModel.ors.LineSegment) → LineSegment¶ Applies a matrix transformation to a line segment.
Parameters: inputLineSegment (ORSModel.ors.LineSegment) – Returns: output (ORSModel.ors.LineSegment) –
-
getTransformedOrientedPlane(self, inputOrientedPlane: ORSModel.ors.OrientedPlane) → OrientedPlane¶ Applies a matrix transformation to an oriented plane.
Parameters: inputOrientedPlane (ORSModel.ors.OrientedPlane) – Returns: output (ORSModel.ors.OrientedPlane) –
-
getTransformedPlane(self, inputPlane: ORSModel.ors.Plane) → Plane¶ Applies a matrix transformation to a plane.
Parameters: inputPlane (ORSModel.ors.Plane) – Returns: output (ORSModel.ors.Plane) –
-
getTransformedVector(self, inputVector: ORSModel.ors.Vector3) → Vector3¶ Applies a matrix transformation to an augmented vector ([x, y, z, 0]).
Parameters: inputVector (ORSModel.ors.Vector3) – Returns: output (ORSModel.ors.Vector3) –
-
getTranslation(self) → Vector3¶ Gets the translation vector.
Returns: output (ORSModel.ors.Vector3) –
-
getTransposed(self) → Matrix4x4¶ Gets the transpose of the matrix.
Returns: output (ORSModel.ors.Matrix4x4) –
-
getValue(self, row: int, column: int) → float¶ Gets a value from the matrix.
Note
Row and column are both between 0 and 3.
Parameters: - row (int) – row (an int)
- column (int) – column (an int)
Returns: output (float) – a float
-
multiply(self, IMatrix: ORSModel.ors.Matrix4x4) → None¶ Multiplies the matrix by another matrix.
Note
The receiver is modified.
Parameters: IMatrix (ORSModel.ors.Matrix4x4) – a matrix to multiply with (an Matrix4x4)
-
none()¶ Matrix4x4.__init__() -> Matrix4x4
-
setAsRotation(self, axisOfRotation: ORSModel.ors.Vector3, angleInRadian: float) → None¶ As rotation matrix from rotation axis and angle.
Parameters: - axisOfRotation (ORSModel.ors.Vector3) –
- angleInRadian (float) –
-
setScale(self, scaleVector: ORSModel.ors.Vector3) → None¶ Sets the scale vector.
Parameters: scaleVector (ORSModel.ors.Vector3) –
-
setTranslation(self, translation: ORSModel.ors.Vector3) → None¶ Sets the translation vector.
Parameters: translation (ORSModel.ors.Vector3) –
-
setValue(self, row: int, column: int, value: float) → None¶ Sets a value in the matrix.
Note
Row and column are both between 0 and 3.
Parameters: - row (int) – row (an int)
- column (int) – column (an int)
- value (float) – a float value
-
setValues(self, values: float) → None¶ Sets the matrix values from an array of floats.
Note
The array of floats should contain 16 float (4 rows X 4 colums).
Parameters: values (float) – an array of 16 float values (a floatPtr)
-
setupAsIdentity(self) → None¶ Initializes the matrix.
-
Mesh¶
-
class
ORSModel.ors.Mesh¶ Bases:
ORSModel.ors.UnstructuredGridbrief_description: A visual that represents a author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 A visual that represents a VisualMesh.
-
computeAnisotropyMappingFromSurfaceNormals(self, iTIndex: int, channelToFill: ORSModel.ors.Channel, vectorFieldEigenvectorMax: ORSModel.ors.VectorField, channelToFillNormOfGradient: ORSModel.ors.Channel, channelToFillDivergence: ORSModel.ors.Channel, vectorFielCurl: ORSModel.ors.VectorField, channelToFillNormOfCurl: ORSModel.ors.Channel, radiusOfInfluence: float, useProjectionBasedAnisotropy: bool, IProgress: ORSModel.ors.Progress) → None¶ Computes the anisotropy mapping of a mesh at the specified locations, using the surface normals.
Note
The vector field object will be cleared before being filled with the current information.
Parameters: - iTIndex (int) – the T index (a uint32_t)
- channelToFill (ORSModel.ors.Channel) – the channel (anisotropy) to fill at each voxel location (a Channel)
- vectorFieldEigenvectorMax (ORSModel.ors.VectorField) – the vector field (eigenvector associated to the highest eigenvalue) to fill at each voxel location of the given channel (a VectorField)
- channelToFillNormOfGradient (ORSModel.ors.Channel) – the channel (norm of the gradient of the orientation) to fill at each voxel location (a Channel)
- channelToFillDivergence (ORSModel.ors.Channel) – the channel (divergence of the orientation) to fill at each voxel location (a Channel)
- vectorFielCurl (ORSModel.ors.VectorField) – the vector field (curl of the orientation) to fill at each voxel location of the given channel (a VectorField)
- channelToFillNormOfCurl (ORSModel.ors.Channel) – the channel (norm of the curl of the orientation) to fill at each voxel location (a Channel)
- radiusOfInfluence (float) – distance from the analysis point to the last considered anisotropy element (a double)
- useProjectionBasedAnisotropy (bool) – anisotropy computation method. If true, the projection based method is used; if false, the eigenvalues from the tensor of inertia are taken (a bool)
- IProgress (ORSModel.ors.Progress) – an optional progress object (a Progress)
-
convertToVTKPolyData(currentTimeStep, includeScalar=False, vertexXScaleFactor=1.0, vertexYScaleFactor=1.0, vertexZScaleFactor=1.0, progress=None)¶
-
static
createFromVTKPolyData(vtkPolyData, currentTimeStep=0, includeScalar=False, generatedMeshisFaceVertex=True, progress=None)¶
-
findMeshContourPointsAndConnectionOnAPlane(self, cuttingPlane: ORSModel.ors.Plane, anOctreeBox: ORSModel.ors.Octree, iTIndex: int, oPoints: ORSModel.ors.ArrayDouble, oPointsConnection: ORSModel.ors.ArrayUnsignedLONGLONG, outNbOfPts: int, outNbOfConnection: int) → None¶ Find points of the mesh on a plane and all connection between those points.
Parameters: - cuttingPlane (ORSModel.ors.Plane) – a cutting plane (Plane)
- anOctreeBox (ORSModel.ors.Octree) – an octree, if the octree is none a default one will be created (Octree)
- iTIndex (int) – the time step (a uint32_t)
- oPoints (ORSModel.ors.ArrayDouble) – output points collection (ArrayDouble)
- oPointsConnection (ORSModel.ors.ArrayUnsignedLONGLONG) – output points connection (edges with size = 2) collection (ArrayUnsignedLongLong)
- outNbOfPts (int) – number of point that make the contour on plane (int)
- outNbOfConnection (int) – number of edges that make the contour on plane (int)
-
fromVTKPolyData(vtkPolyData, currentTimeStep=0, includeScalar=False, progress=None)¶
-
getArea(self, iTIndex: int, aWorldTransformMatrix: ORSModel.ors.Matrix4x4, IProgress: ORSModel.ors.Progress) → float¶ Gets the one sided area from closed mesh.
Note
Result for an open mesh is undefined.
Parameters: - iTIndex (int) – the T index to compute (a uint32_t)
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) – a transformation matrix (an Matrix4x4)
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress) or NULL for no progress
Returns: output (float) – the area (a double)
-
getAsMeshProjectedOnPlane(self, aPlane: ORSModel.ors.Plane, iTIndex: int, aWorldTransformMatrix: ORSModel.ors.Matrix4x4, inMesh: ORSModel.ors.Mesh) → Mesh¶ Parameters: - aPlane (ORSModel.ors.Plane) –
- iTIndex (int) –
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) –
- inMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.Mesh) –
-
getAsMeshWithEdgesDecimatedSmallerThan(self, value: float, IProgress: ORSModel.ors.Progress, worldTransform: ORSModel.ors.Matrix4x4, inoutMesh: ORSModel.ors.Mesh) → Mesh¶ Decimates all edges with a length smaller than a threshold value.
Note
This method is recursive and will decimate edges until all edges length are greater than the supplied threshold value.
Parameters: - value (float) – the threshold value (a double)
- IProgress (ORSModel.ors.Progress) –
- worldTransform (ORSModel.ors.Matrix4x4) –
- inoutMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.Mesh) –
-
getAsROI(self, iTIndex: int, worldTransform: ORSModel.ors.Matrix4x4, pOutputROI: ORSModel.ors.ROI, progress: ORSModel.ors.Progress) → None¶ Parameters: - iTIndex (int) –
- worldTransform (ORSModel.ors.Matrix4x4) –
- pOutputROI (ORSModel.ors.ROI) –
- progress (ORSModel.ors.Progress) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getContourAreaForPlane(self, nax: float, nby: float, ncz: float, nd: float, iTIndex: int) → float¶ Gets area of contours of mesh for plane.
Note
Results for an open contour is undefined.
Note
Only works for triangular primitive type mesh.
Note
The algorithm uses winding to find the inside part of faces. Thus the result for meshes with wrong winding is undefined.
Parameters: - nax (float) – the a value of the plane (a float)
- nby (float) – the b value of the plane (a float)
- ncz (float) – the c value of the plane (a float)
- nd (float) – the d value of the plane (a float)
- iTIndex (int) –
Returns: output (float) – the area (a float)
-
getContourMeshForPlane(self, nax: float, nby: float, ncz: float, nd: float, iTIndex: int, inoutMesh: ORSModel.ors.Mesh) → Mesh¶ Returns a mesh representing the contour of the mesh intersecting the specifed plane.
Note
If a target mesh is supplied, data is written to it and returned, otherwise a new mesh is created.
Note
The general plane equation is ax + by + cz + dw = 0.
Parameters: - nax (float) – The a coefficient of the plane (a float)
- nby (float) – The b coefficient of the plane (a float)
- ncz (float) – The c coefficient of the plane (a float)
- nd (float) – The d coefficient of the plane (a float)
- iTIndex (int) – the target mesh (a Mesh, see note below)
- inoutMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.Mesh) – the resulting mesh (an VisualMesh)
-
getCurrentFaceScalarValuesSlot(self) → int¶ gets the current face scalar.
Note
The scalar index is zero-based, and thus should be less than getFaceScalarValuesSlotCount().
Returns: output (int) – the scalar slot index (a uint16_t)
-
getDefaultColor(self) → Color¶ Gets the mesh default color.
Note
Each color value goes between 0 (none) and 1 (full).
Returns: output (ORSModel.ors.Color) – a color (an Color)
-
getDefaultMeshAlphaColor(self) → float¶ Queries the mesh to get its default alpha color.
Returns: output (float) – Default alpha color used for the mesh (a double)
-
getEdgeCount(self, iTIndex: int) → int¶ Returns the number of edges.
Parameters: iTIndex (int) – the the time step (a uint32_t) Returns: output (int) – an uint64_t
-
getEdgeCountPerFace(self) → int¶ Returns: output (int) –
-
getEdges(self, iTIndex: int) → ArrayUnsignedLong¶ Get the edge array.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayUnsignedLong) – an array of int32_t (an ArrayLong)
-
getExtractedSubMesh(self, IMeshROI: ORSModel.ors.MeshFacesROI, IOutputMesh: ORSModel.ors.Mesh, bExtractSubMeshROI: bool) → Mesh¶ Parameters: - IMeshROI (ORSModel.ors.MeshFacesROI) –
- IOutputMesh (ORSModel.ors.Mesh) –
- bExtractSubMeshROI (bool) –
Returns: output (ORSModel.ors.Mesh) –
-
getFaceCount(self, iTIndex: int) → int¶ Gets the number of faces.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (int) – an uint64_t
-
getFaceScalarValue(self, nScalarValueSlotIndex: int, scalarValueFaceIndex: int, iTIndex: int) → float¶ Gets the value of a face scalar.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- scalarValueFaceIndex (int) – the face index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the value of a face scalar (a double)
-
getFaceScalarValueDescription(self, nScalarValueSlotIndex: int, iTIndex: int) → str¶ Gets a face scalar description.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (str) – the description (a std::wstring)
-
getFaceScalarValueMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ method getFaceScalarValueMax
Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (float) –
-
getFaceScalarValueMaxs(self, iTIndex: int) → ArrayDouble¶ method getFaceScalarValueMaxs
Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getFaceScalarValueMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a face scalar min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getFaceScalarValueMins(self, iTIndex: int) → ArrayDouble¶ method getFaceScalarValueMins
Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getFaceScalarValueOffset(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a face scalar offset value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar offset value (a double)
-
getFaceScalarValueOffsets(self, iTIndex: int) → ArrayDouble¶ Get the face scalar offset values.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayDouble) – the scalar offset values (an ArrayDouble)
-
getFaceScalarValueSlope(self, scalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a face scalar slope value.
Parameters: - scalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar slope value (a double)
-
getFaceScalarValueSlopes(self, iTIndex: int) → ArrayDouble¶ Get the face scalar slope values.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayDouble) – the scalar slope values (an ArrayDouble)
-
getFaceScalarValueSlotLookUpTable(self, nScalarValueSlotIndex: int, iTIndex: int) → dict¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (dict) –
-
getFaceScalarValueUnit(self, nScalarValueSlotIndex: int, iTIndex: int) → int¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (int) –
-
getFaceScalarValues(self, nScalarValueSlotIndex: int, iTIndex: int) → Array¶ Gets the values of a face scalar.
Note
The array of values is of length getFaceCount() * getFaceScalarValuesSlotCount().
Note
The scalar value in the slot s of the face v is located at the index (getFaceScalarValuesSlotCount() * v) + s of the array.
Parameters: - nScalarValueSlotIndex (int) – the face scalar value slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (ORSModel.ors.Array) – an array of values (an ArrayFloat)
-
getFaceScalarValuesAsPandaDataFrame()¶
-
getFaceScalarValuesDatatype(self, nScalarValueSlotIndex: int, iTIndex: int) → int¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (int) –
-
getFaceScalarValuesRangeBoundaryMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a face scalar range max boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getFaceScalarValuesRangeBoundaryMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a face scalar range min boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getFaceScalarValuesRangeMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a face scalar range max value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getFaceScalarValuesRangeMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a face scalar range min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getFaceScalarValuesSlotCount(self) → int¶ Gets the number of slots for face scalar values.
Returns: output (int) – the number of slots (a uint16_t)
-
getFaceScalarValuesWindowMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (float) –
-
getFaceScalarValuesWindowMaxs(self, iTIndex: int) → ArrayDouble¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getFaceScalarValuesWindowMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a face scalar window min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getFaceScalarValuesWindowMins(self, iTIndex: int) → ArrayDouble¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getHideOutOfRangeFaceScalarValues(self) → bool¶ Indicate if out of range values should be hiden.
Returns: output (bool) – (a bool)
-
getMinMaxFaceScalarValue(self, nScalarValueSlotIndex: int, iTIndex: int, fMinValue: float, fMaxValue: float) → None¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
- fMinValue (float) –
- fMaxValue (float) –
-
getNormalsMomentOfInertia(self, iTIndex: int, aWorldTransform: ORSModel.ors.Matrix4x4) → Matrix4x4¶ Parameters: - iTIndex (int) –
- aWorldTransform (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Matrix4x4) –
-
getSignedVerticesDistance(self, target: ORSModel.ors.Mesh, targetOctree: ORSModel.ors.Octree, iTIndex: int, pProgress: ORSModel.ors.Progress) → ArrayFloat¶ Get signed distance between vertices of two meshes.
Parameters: - target (ORSModel.ors.Mesh) – mesh target (Mesh )
- targetOctree (ORSModel.ors.Octree) – targetOctree(Octree)
- iTIndex (int) – iTIndex (a uint32_t)
- pProgress (ORSModel.ors.Progress) – pProgress (Progress)
Returns: output (ORSModel.ors.ArrayFloat) –
-
getTransformed(self, aTransformationMatrix: ORSModel.ors.Matrix4x4, pInOutMesh: ORSModel.ors.Mesh) → Mesh¶ Parameters: - aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- pInOutMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.Mesh) –
-
getUVs(self, iTIndex: int) → ArrayFloat¶ Gets the UV values.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayFloat) – an array of float (an ArrayFloat)
-
getUnstructuredGridHelperClass()¶
-
getUseDefaultMeshAlphaColor(self) → bool¶ Queries the mesh to see if it uses its default alpha color.
Returns: output (bool) – true if a default alpha color is used for the mesh, false otherwise
-
getUseDefaultMeshColor(self) → bool¶ Queries the mesh to see if it uses its default color.
Returns: output (bool) – true if the mesh uses its default color, false otherwise
-
getUseFaceScalarValues(self) → bool¶ Sets the mesh to have face scalar values or not.
Returns: output (bool) – TRUE to use scalar values, FALSE otherwise
-
getVertexScalarValuesAsPandaDataFrame()¶
-
getVerticesClosestFacesId(self, target: ORSModel.ors.Mesh, targetOctree: ORSModel.ors.Octree, iTIndex: int, pProgress: ORSModel.ors.Progress, oMapping: ORSModel.ors.ArrayLong, oCollisionPoints: ORSModel.ors.ArrayDouble) → None¶ Get for each vertex of a mesh the closest faces id of an other mesh.
Parameters: - target (ORSModel.ors.Mesh) – mesh target (Mesh )
- targetOctree (ORSModel.ors.Octree) – targetOctree(Octree)
- iTIndex (int) – iTIndex (a uint32_t)
- pProgress (ORSModel.ors.Progress) – pProgress (Progress)
- oMapping (ORSModel.ors.ArrayLong) – pProgress (ArrayLong)
- oCollisionPoints (ORSModel.ors.ArrayDouble) – pProgress (ArrayDouble)
-
getVerticesDistance(self, target: ORSModel.ors.Mesh, targetOctree: ORSModel.ors.Octree, iTIndex: int, pProgress: ORSModel.ors.Progress) → ArrayFloat¶ Get absolute distance between vertices of two meshes.
Parameters: - target (ORSModel.ors.Mesh) – mesh target (Mesh )
- targetOctree (ORSModel.ors.Octree) – targetOctree(Octree)
- iTIndex (int) – iTIndex (a uint32_t)
- pProgress (ORSModel.ors.Progress) – pProgress (Progress)
Returns: output (ORSModel.ors.ArrayFloat) –
-
getVerticesNormals(self, iTIndex: int) → ArrayFloat¶ Gets the normals.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayFloat) – the normals data (an ArrayFloat)
-
getVolume(self, aPlane: ORSModel.ors.Plane, timeStep: int, aWorldTransformMatrix: ORSModel.ors.Matrix4x4, IProgress: ORSModel.ors.Progress) → float¶ Gets the volume from closed mesh.
Note
Result for an open mesh is undefined.
Note
Only works for triangular primitive type mesh.
Note
The algorithm uses winding to find the inside part of faces. Thus the result for meshes with wrong winding is undefined.
Parameters: - aPlane (ORSModel.ors.Plane) – a progress object (an Progress) or NULL for no progress
- timeStep (int) –
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (float) – the volume (a double)
-
getWorldTransform(timestep=0)¶ Get the Matrix4x4 for transforming from local to world coordinates
Parameters: timestep (int) – Return: Rtype: ORSModel.ors.Matrix4x4
-
isWindingSoThatFaceNormalAreOutside(self, iTIndex: int, progress: ORSModel.ors.Progress) → bool¶ Check if face vertex normal direction point outside of the mesh.
Parameters: - iTIndex (int) – the time step (a uint32_t)
- progress (ORSModel.ors.Progress) – a progress object (a Progress) or none for no progress
Returns: output (bool) –
-
labelizeMesh(self, nScalarValueSlotIndex: int, iTIndex: int) → int¶ Labelizes mesh vertices based on connectivity.
Note
The scalar for the specified index should be already initialized.
Parameters: - nScalarValueSlotIndex (int) – the scalar index where to place labels (a uint16_t)
- iTIndex (int) –
Returns: output (int) – the number of labels found (an uint32_t)
-
laplacianSmooth(self, nNbIterations: int, iTIndex: int) → None¶ Parameters: - nNbIterations (int) –
- iTIndex (int) –
-
mapScalarValuesFromAnOtherMesh(self, referenceMesh: ORSModel.ors.Mesh, mapping: ORSModel.ors.ArrayLong, collisionPoints: ORSModel.ors.ArrayDouble, referenceSlotIndex: int, sourceSlotIndex: int, referenceTIndex: int, sourceTIndex: int, defaultScalarValue: float) → None¶ Maps vertices scalar values of a reference mesh to a source mesh.
Parameters: - referenceMesh (ORSModel.ors.Mesh) – the reference mesh (a Mesh)
- mapping (ORSModel.ors.ArrayLong) – an array that give which face ID of the reference mesh match with the source mesh (an ArrayLong)
- collisionPoints (ORSModel.ors.ArrayDouble) – an array that give the collision point on the reference mesh (an ArrayDouble)
- referenceSlotIndex (int) – the slot of the reference mesh to map (a uint32_t)
- sourceSlotIndex (int) – the slot destination of the source mesh (a uint32_t)
- referenceTIndex (int) – the time step of the reference mesh (a uint32_t)
- sourceTIndex (int) – the time step of the soruce mesh (a uint32_t)
- defaultScalarValue (float) – a default value in case that no match is found between a vertexe and a face (double)
-
none()¶ Mesh.__init__() -> Mesh
-
removeDuplicateVertices(self, fEpsilon: float, iTIndex: int, pInOutMesh: ORSModel.ors.Mesh) → Mesh¶ Removes duplicate vertices of the mesh.
Note
If a target mesh is supplied, data is written to it and returned, otherwise a new mesh is created.
Parameters: - fEpsilon (float) – an epsilon value (a float)
- iTIndex (int) – the time step (a uint32_t)
- pInOutMesh (ORSModel.ors.Mesh) – the output mesh (a Mesh)
Returns: output (ORSModel.ors.Mesh) – the result mesh (a Mesh)
-
setCurrentFaceScalarValuesSlot(self, slotIndex: int) → None¶ Sets the current face scalar.
Note
The scalar index is zero-based, and thus should be less than getFaceScalarValuesSlotCount().
Parameters: slotIndex (int) – the current scalar slot index (a uint16_t)
-
setDefaultColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the mesh default color.
Note
Each color value goes between 0 (none) and 1 (full).
Note
You need to call setUseDefaultColor(TRUE) for the default color to be used.
Note
You need to call initializeVisual after color changes for them to be visible on the screen.
Parameters: IColor (ORSModel.ors.Color) – a color (an Color)
-
setDefaultMeshAlphaColor(self, value: float) → None¶ Sets the mesh its default alpha color.
Parameters: value (float) – Alpha color (double)
-
setEdgeCountPerFace(self, value: int) → None¶ Parameters: value (int) –
-
setFaceScalarValue(self, nScalarValueSlotIndex: int, scalarValueFaceIndex: int, aValue: float, iTIndex: int) → None¶ Sets the value of a face scalar.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- scalarValueFaceIndex (int) – the face index (an uint32_t)
- aValue (float) – the value of a face scalar to set (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setFaceScalarValueDescription(self, nScalarValueSlotIndex: int, value: str, iTIndex: int) → None¶ Parameters: - nScalarValueSlotIndex (int) –
- value (str) –
- iTIndex (int) –
-
setFaceScalarValueMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a face scalar max value.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (a uint16_t)
- value (float) – scalar max value (a double)
- iTIndex (int) – time step (a uint32_t)
-
setFaceScalarValueMaxs(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ method setFaceScalarValueMaxs
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setFaceScalarValueMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ method setFaceScalarValueMin
Parameters: - nScalarValueSlotIndex (int) – the slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setFaceScalarValueMins(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ method setFaceScalarValueMins
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setFaceScalarValueOffset(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a face scalar offset value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the scalar offset value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setFaceScalarValueOffsets(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Set the face scalar offset values.
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) – scalar offset values (an ArrayDouble)
- iTIndex (int) – time step (a uint32_t)
-
setFaceScalarValueSlope(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Gets a face scalar slope value.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (a uint16_t)
- value (float) – scalar slope value (a double)
- iTIndex (int) – time step (a uint32_t)
-
setFaceScalarValueSlopes(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Set the face scalar slope values.
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) – scalar slope values (an ArrayDouble)
- iTIndex (int) – time step (a uint32_t)
-
setFaceScalarValueSlotLookUpTable(self, lookUpTable: dict, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Parameters: - lookUpTable (dict) –
- nScalarValueSlotIndex (int) –
- iTIndex (int) –
-
setFaceScalarValueUnit(self, nScalarValueSlotIndex: int, value: int, iTIndex: int) → None¶ Parameters: - nScalarValueSlotIndex (int) –
- value (int) –
- iTIndex (int) –
-
setFaceScalarValues(self, pScalarValues: ORSModel.ors.Array, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Sets the values of a face scalar.
Note
The array of values is of length getFaceCount() * getFaceScalarValuesSlotCount().
Note
The scalar value in the slot s of the face v is located at the index (getFaceScalarValuesSlotCount() * v) + s of the array.
Parameters: - pScalarValues (ORSModel.ors.Array) – an array of values (an ArrayFloat)
- nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
-
setFaceScalarValuesDatatype(self, iSlotIndex: int, iTIndex: int, nFaceScalarValuesDatatype: int) → None¶ Parameters: - iSlotIndex (int) –
- iTIndex (int) –
- nFaceScalarValuesDatatype (int) –
-
setFaceScalarValuesFromPandaDataFrame(dataFrame, iTIndex=0)¶
-
setFaceScalarValuesRangeBoundaryMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a face scalar range max boundary value.
Parameters: - nScalarValueSlotIndex (int) – the slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setFaceScalarValuesRangeBoundaryMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a face scalar range min boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setFaceScalarValuesRangeMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a face scalar range max value.
Parameters: - nScalarValueSlotIndex (int) – the slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setFaceScalarValuesRangeMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a face scalar range min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setFaceScalarValuesSlotCount(self, value: int) → None¶ Sets the number of slots for face scalar values.
Parameters: value (int) – the number of slots (a uint16_t)
-
setFaceScalarValuesWindowMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a face scalar max value.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (a uint16_t)
- value (float) – scalar max value (a double)
- iTIndex (int) – time step (a uint32_t)
-
setFaceScalarValuesWindowMaxs(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setFaceScalarValuesWindowMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ method setFaceScalarValuesWindowMin
Parameters: - nScalarValueSlotIndex (int) – the slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setFaceScalarValuesWindowMins(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setHideOutOfRangeFaceScalarValues(self, value: bool) → None¶ Indicate if out of range values should be hiden.
Parameters: value (bool) –
-
setUseDefaultMeshAlphaColor(self, value: bool) → None¶ Sets the mesh to use its default alpha color.
Parameters: value (bool) – TRUE for using a default alpha color for the mesh, FALSE otherwise (bool)
-
setUseDefaultMeshColor(self, value: bool) → None¶ Sets the mesh to use its default color.
Parameters: value (bool) – TRUE to use the mesh default color, FALSE otherwise
-
setUseFaceScalarValues(self, value: bool) → None¶ Gets the status of face scalar values usage.
Parameters: value (bool) –
-
setVertexScalarValuesFromPandaDataFrame(dataFrame, iTIndex=0)¶
-
updateVerticesNormal(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
MeshFacesROI¶
-
class
ORSModel.ors.MeshFacesROI¶ Bases:
ORSModel.ors.Nodebrief_description: Represents a region of interest for a mesh ( author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 warning: Not currently supported. see: ROI Represents a region of interest for a Mesh.
-
addFaceIndex(self, nFaceIndex: int, nTIndex: int) → None¶ Parameters: - nFaceIndex (int) –
- nTIndex (int) –
-
addFacesIndexes(self, indexes: ORSModel.ors.ArrayUnsignedLong, nNbIndex: int, nTIndex: int) → None¶ Parameters: - indexes (ORSModel.ors.ArrayUnsignedLong) –
- nNbIndex (int) –
- nTIndex (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFaceIndexAtPosition(self, pos: int, nTIndex: int) → int¶ Parameters: - pos (int) –
- nTIndex (int) –
Returns: output (int) –
-
getFaceIndexes(self, nTimeStep: int, IInputFaceIndexes: ORSModel.ors.ArrayUnsignedLong) → ArrayUnsignedLong¶ Parameters: - nTimeStep (int) –
- IInputFaceIndexes (ORSModel.ors.ArrayUnsignedLong) –
Returns: output (ORSModel.ors.ArrayUnsignedLong) –
-
getFaceIndexesCount(self, nTIndex: int) → int¶ Parameters: nTIndex (int) – Returns: output (int) –
-
getHasFaceIndex(self, nFaceIndex: int, nTIndex: int) → bool¶ Parameters: - nFaceIndex (int) –
- nTIndex (int) –
Returns: output (bool) –
-
getIntersectionWithMeshFacesROI(self, IInputMeshROI: ORSModel.ors.MeshFacesROI, nTimeStep: int, IOutputMeshROI: ORSModel.ors.MeshFacesROI) → MeshFacesROI¶ Parameters: - IInputMeshROI (ORSModel.ors.MeshFacesROI) –
- nTimeStep (int) –
- IOutputMeshROI (ORSModel.ors.MeshFacesROI) –
Returns: output (ORSModel.ors.MeshFacesROI) –
-
getInverseMeshFacesROI(self, nTimeStep: int, IOutputMeshROI: ORSModel.ors.MeshFacesROI) → MeshFacesROI¶ Parameters: - nTimeStep (int) –
- IOutputMeshROI (ORSModel.ors.MeshFacesROI) –
Returns: output (ORSModel.ors.MeshFacesROI) –
-
getIsVisibleForAllDisplays(self) → bool¶ Gets the visibility of the receiver in all displays.
Returns: output (bool) – true if the receiver is visible is all displays, false otherwise
-
getIsVisibleForDisplay(self, IDisplay: ORSModel.ors.View) → bool¶ Gets the visibility of the receiver in a given display.
Parameters: IDisplay (ORSModel.ors.View) – the display (an View) Returns: output (bool) – true if the receiver is visible, false otherwise
-
getSubtractionFromMeshFacesROI(self, IInputMeshROI: ORSModel.ors.MeshFacesROI, nTimeStep: int, IOutputMeshROI: ORSModel.ors.MeshFacesROI) → MeshFacesROI¶ Parameters: - IInputMeshROI (ORSModel.ors.MeshFacesROI) –
- nTimeStep (int) –
- IOutputMeshROI (ORSModel.ors.MeshFacesROI) –
Returns: output (ORSModel.ors.MeshFacesROI) –
-
getUnionWithMeshFacesROI(self, IInputMeshROI: ORSModel.ors.MeshFacesROI, nTimeStep: int, IOutputMeshROI: ORSModel.ors.MeshFacesROI) → MeshFacesROI¶ Parameters: - IInputMeshROI (ORSModel.ors.MeshFacesROI) –
- nTimeStep (int) –
- IOutputMeshROI (ORSModel.ors.MeshFacesROI) –
Returns: output (ORSModel.ors.MeshFacesROI) –
-
none()¶ MeshFacesROI.__init__() -> MeshFacesROI
-
removeAllFaceIndexes(self, nTIndex: int) → None¶ Parameters: nTIndex (int) –
-
removeFaceIndex(self, nFaceIndex: int, nTIndex: int) → None¶ Parameters: - nFaceIndex (int) –
- nTIndex (int) –
-
removeFaceIndexAtPosition(self, pos: int, nTimeStep: int) → int¶ Parameters: - pos (int) –
- nTimeStep (int) –
Returns: output (int) –
-
setColor(self, aColor: ORSModel.ors.Color) → None¶ Parameters: aColor (ORSModel.ors.Color) –
-
setIsVisibleForAllDisplays(self, bValue: bool) → None¶ Sets the visibility of the receiver in all displays.
Note
This API overrides all prior calls to setIsVisibleForDisplay(), or in other words, any display specific setting is erased.
Parameters: bValue (bool) – true to make the receiver visible in all displays, false to hide it
-
setIsVisibleForDisplay(self, IDisplay: ORSModel.ors.View, bValue: bool) → None¶ Sets the visibility of the receiver in a given display.
Note
This API overrides a prior call to setIsVisibleForAllDisplays(), for a given display.
Parameters: - IDisplay (ORSModel.ors.View) – the display (an View)
- bValue (bool) – true to make the receiver visible, false to hide it
-
Model¶
-
class
ORSModel.ors.Model¶ Bases:
sip.wrapperbrief_description: Main gateway into the author: Normand Mongeau. All other members of ORS participated. version: 1.2 date: September 2006 Main gateway into the ORS Core library. Used for general functionality of the ORS Core library.
-
addCallbackToClassEvent(aClassName: str, anEventName: str, sCallbackName: str, callbackInfo: int, permanent: bool) → bool¶ Adds a callback subscription to a class event.
Parameters: - aClassName (str) – the class name (a string)
- anEventName (str) – the event name (a string)
- sCallbackName (str) – the callback name (a string)
- callbackInfo (bytes) – a pointer to a ORS_EVENT_CALLBACK_INFO struct
- permanent (bool) – true to make the callback permanent (will survive a new session), false for a normal callback
Returns: output (bool) – true if operation was successful, false otherwise (the callback already existed)
-
addCallbackToGlobalEvent(anEventName: str, sCallbackName: str, callbackInfo: int, permanent: bool) → bool¶ Adds a callback subscription to a global event.
Parameters: - anEventName (str) – the event name (a string)
- sCallbackName (str) – the callback name (a string)
- callbackInfo (bytes) – a pointer to a ORS_EVENT_CALLBACK_INFO struct
- permanent (bool) – true to make the callback permanent (will survive a new session), false for a normal callback
Returns: output (bool) – true if operation was successful, false otherwise (the callback already existed)
-
checkFeature(iProduct: int, iFeature: int) → bool¶ Parameters: - iProduct (int) –
- iFeature (int) –
Returns: output (bool) –
-
deleteAllObjects(pFinalExit: bool) → None¶ Deletes every core object.
Parameters: pFinalExit (bool) –
-
downgrade() → None¶
-
getActiveWorkerThreadsCount() → int¶ Returns the number of active worker threads.
Returns: output (int) – a count of active worker threads (a uint32_t)
-
getAvailableCPUCount() → int¶ Returns how many CPUs are available.
Note
In order to prepare some computations to be multi-threaded, this method returns how many CPUs are available.
Returns: output (int) – a CPU count (a uint16_t)
-
getBuildNumber() → str¶ Returns the Core library internal build number.
Returns: output (str) – a build number text (a string)
-
getClassEventCallbackEnabled(aClassName: str, sEventName: str, sCallbackName: str) → bool¶ Gets the enabled state of a callback subscription to a class event.
Parameters: - aClassName (str) – the event name (a string)
- sEventName (str) – the callback name (a string)
- sCallbackName (str) –
Returns: output (bool) – true if the callback is enabled, false if the callback is disabled or if the callback was not found
-
getDLLFilename() → str¶ Returns the Core library file name.
Returns: output (str) – a fully qualified file path (a string)
-
getDLLVersion() → str¶ Returns the Core library internal version.
Returns: output (str) – a version text (a string)
-
getDebugMode() → bool¶ Checks if the Core library is in debug mode.
Returns: output (bool) – true if in debug mode, false otherwise
-
getEpsilon() → float¶ Returns: output (float) –
-
getFontNames() → str¶ Gets the available font names.
Returns: output (str) –
-
getGlobalEventCallbackEnabled(sEventName: str, sCallbackName: str) → bool¶ Gets the enabled state of a callback subscription to a global event.
Parameters: - sEventName (str) – the event name (a string)
- sCallbackName (str) – the callback name (a string)
Returns: output (bool) – true if the callback is enabled, false if the callback is disabled or if the callback was not found
-
getIsRunningInReleaseMode() → bool¶ Checks if the Core library is running in release mode.
Returns: output (bool) – true if in release mode, false otherwise
-
getLicenseExpiry() → int¶ Returns: output (int) –
-
getLicenseInformation(iKey: int) → str¶ Parameters: iKey (int) – Returns: output (str) –
-
getMajorVersion() → str¶ Returns the Core library internal major version.
Returns: output (str) – a version text (a string)
-
getMaximumViewportHeight() → int¶ Returns: output (int) –
-
getMaximumViewportWidth() → int¶ Returns: output (int) –
-
getPresetFileExtension() → str¶ Gets the extension of preset files.
Returns: output (str) –
-
getSessionUserName() → str¶ Gets the current user account name.
Returns: output (str) –
-
getStartupResultCode() → int¶ Returns: output (int) –
-
getWasLicenseDowngraded() → bool¶ Returns: output (bool) –
-
isNVidia() → bool¶ Returns: output (bool) –
-
isNotNone(self) → bool¶ Returns: output (bool) –
-
loadSessionFromFile(aFilename: str) → bool¶ Loads a session file.
Parameters: aFilename (str) – a fully qualified file path (a string) Returns: output (bool) – true if operation was successful, false otherwise
-
removeCallbackFromClassEvent(aClassName: str, sEventName: str, sCallbackName: str) → bool¶ Removes a callback subscription to a class event.
Parameters: - aClassName (str) – the class name (a string)
- sEventName (str) – the event name (a string)
- sCallbackName (str) – the callback name (a string)
Returns: output (bool) – true if operation was successful, false otherwise (the callback was not found)
-
removeCallbackFromGlobalEvent(sEventName: str, sCallbackName: str) → bool¶ Removes a callback subscription to a global event.
Parameters: - sEventName (str) – the event name (a string)
- sCallbackName (str) – the callback name (a string)
Returns: output (bool) – true if removal was successful, false otherwise (the callback did not exist)
-
saveSessionToFile(pSessionName: str, aFilename: str) → int¶ Saves the current session to a file.
Parameters: - pSessionName (str) – a session name (a string)
- aFilename (str) – a fully qualified file path (a string)
Returns: output (int) – 0 if operation was successful, otherwise an error code
-
setAvailableCPUCount(pNbCPUs: int) → None¶ Tells the Core library to limit the number of CPUs it should use.
Note
Many algorithms are multi-threaded, use this method if you want to limit the number of CPUs used internally, to allow other applications to be responsive for example.
Note
Setting this value to 0 means to use all CPUs.
Parameters: pNbCPUs (int) – a count (a uint16_t)
-
setClassEventCallbackEnabled(aClassName: str, sEventName: str, sCallbackName: str, bValue: bool) → bool¶ Enables/disables a callback subscription to a class event.
Parameters: - aClassName (str) – the event name (a string)
- sEventName (str) – the callback name (a string)
- sCallbackName (str) – true to enable the callback, false to disable it
- bValue (bool) –
Returns: output (bool) – true if operation was successful, false otherwise (the callback was not found)
-
setDebugMode(pState: bool) → None¶ Sets the COM’s debug mode on or off.
Parameters: pState (bool) –
-
setEpsilon(anEpsilon: float) → None¶ Parameters: anEpsilon (float) –
-
setGlobalEventCallbackEnabled(sEventName: str, sCallbackName: str, bValue: bool) → bool¶ Enables/disables a callback subscription to a global event.
Parameters: - sEventName (str) – the event name (a string)
- sCallbackName (str) – the callback name (a string)
- bValue (bool) – true to enable the callback, false to disable it
Returns: output (bool) – true if operation was successful, false otherwise (the callback was not found)
-
setPrecision(iPrecision: int) → None¶ Sets the precision of computations when displayed.
Parameters: iPrecision (int) –
-
setSessionUserName(aName: str) → None¶ Sets the current user account name.
Parameters: aName (str) –
-
setStartupCode(iVal: int) → None¶ Parameters: iVal (int) –
-
setStartupExpiry(iVal: int) → None¶ Parameters: iVal (int) –
-
startWorkersFor(pWorkData: int) → None¶ Parameters: pWorkData (bytes) –
-
stopWorkersWithID(id: int) → None¶ Parameters: id (int) –
-
triggerGlobalEvent(anEventName: str, sData: str) → bool¶ Triggers a global event.
Parameters: - anEventName (str) – the event name (a string)
- sData (str) – an event specific string
Returns: output (bool) – true if event was triggered, false otherwise
-
yieldUIWorker() → None¶ Gives the UI worker control to process any pending tasks that it holds.
-
MultiROI¶
-
class
ORSModel.ors.MultiROI¶ Bases:
ORSModel.ors.StructuredGridbrief_description: Container for multiple ROIs. author: Normand Mongeau. All other members of ORS participated. version: 1.0 date: February 2010
-
addToVolumeROI(self, pOutputROI: ORSModel.ors.ROI, pLabel: int) → None¶ Adds all the voxels associated to a label to a VolumeROI.
Note
The ROI is not cleared prior to adding.
Parameters: - pOutputROI (ORSModel.ors.ROI) – the output Volume ROI (a ROI)
- pLabel (int) – the label to extract (a uint32_t)
-
addToVolumeROILabelAtIndex(self, pOutputROI: ORSModel.ors.ROI, pIndex: int) → None¶ Finds the label at a given index, then extracts the label data and adds it to a VolumeROI.
Parameters: - pOutputROI (ORSModel.ors.ROI) – the output Volume ROI (an ROI)
- pIndex (int) – the index (a int64_t)
-
addToVolumeROILabelAtPosition(self, pOutputROI: ORSModel.ors.ROI, tIndex: int, pVector: ORSModel.ors.Vector3) → None¶ Finds the label at a given position, then extracts the label data and adds it to a VolumeROI.
Parameters: - pOutputROI (ORSModel.ors.ROI) – the output Volume ROI (an ROI)
- tIndex (int) – the T value (a uint32_t)
- pVector (ORSModel.ors.Vector3) – the position (an Vector3)
-
addVolumeROIToLabel(self, aLabel: int, pROI: ORSModel.ors.ROI) → bool¶ Parameters: - aLabel (int) –
- pROI (ORSModel.ors.ROI) –
Returns: output (bool) –
-
appendMultiROI(self, pLabeledMultiROI: ORSModel.ors.MultiROI, pLabelArray: ORSModel.ors.ArrayUnsignedLong) → None¶ Parameters: - pLabeledMultiROI (ORSModel.ors.MultiROI) –
- pLabelArray (ORSModel.ors.ArrayUnsignedLong) –
-
clear(self) → None¶ Clears the entire data.
-
clearLabel(self, pLabel: int) → None¶ Clears a label.
Parameters: pLabel (int) – the label to clear (a uint32_t)
-
clearLabels(self, pLabelArray: ORSModel.ors.ArrayUnsignedLong) → None¶ Clears a set of labels.
Parameters: pLabelArray (ORSModel.ors.ArrayUnsignedLong) – an array of labels to clear (an ArrayUnsignedLong)
-
copyInto(self, aMultiROI: ORSModel.ors.MultiROI) → None¶ Copies the receiver into anotherROI.
Parameters: aMultiROI (ORSModel.ors.MultiROI) – a destination multiROI (an MultiROI)
-
fromChannel(self, pChan: ORSModel.ors.Channel) → None¶ Parameters: pChan (ORSModel.ors.Channel) –
-
generateAnalyzer(self, inputChannel: ORSModel.ors.Channel, pROI: ORSModel.ors.ROI, aTimeStep: int, pStats: int, pCompute2DStats: bool, IProgress: ORSModel.ors.Progress) → MultiROIAnalyzer¶ Parameters: - inputChannel (ORSModel.ors.Channel) –
- pROI (ORSModel.ors.ROI) –
- aTimeStep (int) –
- pStats (int) –
- pCompute2DStats (bool) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.MultiROIAnalyzer) –
-
getAsArray(self, tIndex: int, pOutputArray: ORSModel.ors.ArrayUnsignedLong) → ArrayUnsignedLong¶ Extracts the labels and adds them all to anArray.
Note
If an output Array is supplied, data is written to it and returned, otherwise a new Array is created.
Note
The Array is cleared prior to adding.
Parameters: - tIndex (int) – time index (a uint32_t)
- pOutputArray (ORSModel.ors.ArrayUnsignedLong) – an optional output Array (an ArrayUnsignedLong)
Returns: output (ORSModel.ors.ArrayUnsignedLong) – the resulting Array (an ArrayUnsignedLong)
-
getAsChannelWithLabelOffset(self, labelOffset: int, pOutputChannel: ORSModel.ors.Channel) → Channel¶ Extracts the labels and adds them all to a channel.
Note
If an output channel is supplied, data is written to it and returned, otherwise a new channel is created.
Note
The channel’s data type is determined by the total number of labels within:
Parameters: - labelOffset (int) – a label offset to add to output channel values (a uint32_t)
- pOutputChannel (ORSModel.ors.Channel) – an optional output channel (an Channel)
Returns: output (ORSModel.ors.Channel) – the resulting channel (an Channel)
-
getAsCubicMesh(self, bWorld: bool, IProgress: ORSModel.ors.Progress, IInMesh: ORSModel.ors.Mesh) → Mesh¶ Parameters: - bWorld (bool) –
- IProgress (ORSModel.ors.Progress) –
- IInMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.Mesh) –
-
getAsCubicMeshSubset(self, IEnabledLabel: ORSModel.ors.ArrayChar, bWorld: bool, IProgress: ORSModel.ors.Progress, IInMesh: ORSModel.ors.Mesh) → Mesh¶ Parameters: - IEnabledLabel (ORSModel.ors.ArrayChar) –
- bWorld (bool) –
- IProgress (ORSModel.ors.Progress) –
- IInMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.Mesh) –
-
getAsGraph(self, optionalInputGraph: ORSModel.ors.Graph, IProgress: ORSModel.ors.Progress) → Graph¶ Computes the graph of theMultiROI’s connectivity.
Parameters: - optionalInputGraph (ORSModel.ors.Graph) – an optional input graph to modify (a Graph)
- IProgress (ORSModel.ors.Progress) – a progress object (a Progress)
Returns: output (ORSModel.ors.Graph) – graph of the MultiROI’s connectivity
-
getBoundingBoxOfLabel(self, pTIndex: int, iLabel: int) → Box¶ Parameters: - pTIndex (int) –
- iLabel (int) –
Returns: output (ORSModel.ors.Box) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getClipBox(timestep=0, display=None)¶ Gets the clip box of the ROI or of the MultiROI
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: aClipBox (ORSModel.ors.Box) – the clip box
-
getClipping(timestep=0, display=None)¶ Gets the origin and the opposite summit of the clip box of the ROI or MultiROI
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: - clipOriginSummit (ORSModel.ors.Vector3) – the origin summit of the clip box
- clipOppositeSummit (ORSModel.ors.Vector3) – the origin opposite summit of the clip box
-
getCurrentScalarValuesSlot(self) → int¶ gets the current scalar value slot index.
Note
The scalar index is zero-based, and thus should be less than getScalarValuesSlotCount().
Returns: output (int) – the scalar slot index (a uint16_t)
-
getHideOutOfRangeScalarValues(self) → bool¶ Indicate if out of range values should be hidden.
Returns: output (bool) – (a bool)
-
getIntersectionWithLabeledMultiROI(self, pInputLabeledMultiROI: ORSModel.ors.MultiROI, anOutputLabeledMultiROI: ORSModel.ors.MultiROI) → MultiROI¶ Intersects theMultiROI with another MultiROI.
Note
If a target MultiROI is supplied, data is written to it and returned, otherwise a new MultiROI is created.
Parameters: - pInputLabeledMultiROI (ORSModel.ors.MultiROI) – the MultiROI to intersect with (a MultiROI)
- anOutputLabeledMultiROI (ORSModel.ors.MultiROI) – the output MultiROI (a MultiROI), see note below
Returns: output (ORSModel.ors.MultiROI) – the intersection result
-
getIntersectionWithROI(self, aROI: ORSModel.ors.ROI, anOutputMultiROI: ORSModel.ors.MultiROI) → MultiROI¶ Intersects theMultiROI with a ROI.
Note
If a target MultiROI is supplied, data is written to it and returned, otherwise a new MultiROI is created.
Parameters: - aROI (ORSModel.ors.ROI) – the ROI to intersect with (an ROI)
- anOutputMultiROI (ORSModel.ors.MultiROI) – the output MultiROI (a MultiROI), see note below
Returns: output (ORSModel.ors.MultiROI) – the intersection result
-
getIsClipped(timestep=0, display=None)¶ Gets to know if the clip box of the ROI or MultiROI is active
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: isClipped (bool) – if True, the clip box of the ROI or MultiROI is visible; False otherwise.
-
getIsEmpty(self) → bool¶ Verifies to see if all labels are empty or not.
Returns: output (bool) – TRUE if no labels within, FALSE otherwise
-
getLabelAtIndex(self, pIndex: int) → int¶ Gets the label value at a given index.
Note
If no label exists at the given index 0 is returned.
Parameters: pIndex (int) – the index (a int64_t) Returns: output (int) – the resulting label (a uint32_t)
-
getLabelAtPosition(self, tIndex: int, pVector: ORSModel.ors.Vector3) → int¶ Gets the label value at a given World position.
Note
If no label exists at the given position, 0 is returned.
Parameters: - tIndex (int) – the T value (a uint32_t)
- pVector (ORSModel.ors.Vector3) – the position (an Vector3)
Returns: output (int) – the resulting label (a uint32_t)
-
getLabelColor(self, label: int) → Color¶ Parameters: label (int) – Returns: output (ORSModel.ors.Color) –
-
getLabelCount(self) → int¶ Gets the number of distinct labels within.
Returns: output (int) – the number of labels (a uint32_t)
-
getLabelSize(self, pLabel: int) → int¶ Gets the size of a given label.
Parameters: pLabel (int) – the label value (a uint32_t) Returns: output (int) – the size of the label (an int64_t)
-
getMergedLabelsIntersectingMultiROI(self, pInputMROI: ORSModel.ors.MultiROI) → MultiROI¶ Parameters: pInputMROI (ORSModel.ors.MultiROI) – Returns: output (ORSModel.ors.MultiROI) –
-
getMergedLabelsIntersectingROI(self, inputROI: ORSModel.ors.ROI) → MultiROI¶ Parameters: inputROI (ORSModel.ors.ROI) – Returns: output (ORSModel.ors.MultiROI) –
-
getMinimalBox(self, iTIndex: int) → Box¶ Get miminal box (also know as Oriented BoundingBox in litterature)
Parameters: iTIndex (int) – the T index (a uint32_t) Returns: output (Box) –
-
getNonEmptyLabelCount(self) → int¶ Gets the number of distinct labels within.
Returns: output (int) – the number of non empty labels (a uint32_t)
-
getNonEmptyLabels(self, pOutputArray: ORSModel.ors.ArrayUnsignedLong) → ArrayUnsignedLong¶ Returns an array of all non empty labels.
Note
If an output array is supplied, data is written to it and returned, otherwise a new array is created.
Note
The array is cleared prior to adding.
Parameters: pOutputArray (ORSModel.ors.ArrayUnsignedLong) – an optional output array (an ArrayUnsignedLong) Returns: output (ORSModel.ors.ArrayUnsignedLong) – the resulting array (an ArrayUnsignedLong)
-
getProjectionIn(self, aLabeledMultiROI: ORSModel.ors.MultiROI, sourceTimeOffset: int, pProgress: ORSModel.ors.Progress) → MultiROI¶ Parameters: - aLabeledMultiROI (ORSModel.ors.MultiROI) –
- sourceTimeOffset (int) –
- pProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.MultiROI) –
-
getScalarValueDescription(self, nScalarValueSlotIndex: int, iTIndex: int) → str¶ Gets a scalar description value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (str) – the scalar description value (a std::wstring)
-
getScalarValueId(self, nScalarValueSlotIndex: int, iTIndex: int) → str¶ Gets a scalar id value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (str) – the scalar id value (a std::wstring)
-
getScalarValueMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a scalar max value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar max value (a float)
-
getScalarValueMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a scalar min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar min value (a float)
-
getScalarValueOffset(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a scalar offset value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar offset value (a float)
-
getScalarValueSlope(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a scalar slope value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar slope value (a float)
-
getScalarValueSlotLookUpTable(self, nScalarValueSlotIndex: int, iTIndex: int) → dict¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (dict) –
-
getScalarValueUnit(self, nScalarValueSlotIndex: int, iTIndex: int) → int¶ Gets a scalar value unit.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (a uint16_t)
- iTIndex (int) – time step (a uint32_t)
Returns: output (int) – the scalar value unit (an uint16_t)
-
getScalarValues(self, nScalarValueSlotIndex: int, iTIndex: int) → Array¶ Gets the values of a scalar.
Note
The scalar value in the slot s of the v is located at the index (getScalarValuesSlotCount() * v) + s of the array.
Parameters: - nScalarValueSlotIndex (int) – the time step (a uint32_t)
- iTIndex (int) –
Returns: output (ORSModel.ors.Array) – an array of values (an Array)
-
getScalarValuesAsPandaDataFrame(iTIndex=0)¶
-
getScalarValuesDatatype(self, nScalarValueSlotIndex: int, iTIndex: int) → int¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (int) –
-
getScalarValuesRangeBoundaryMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a scalar range max boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getScalarValuesRangeBoundaryMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a scalar range min boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getScalarValuesRangeMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a scalar range max value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot indexuint16_t(a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getScalarValuesRangeMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a scalar range min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getScalarValuesSlotCount(self) → int¶ Gets the number of slots for scalar values.
Returns: output (int) – the number of slots (a uint16_t)
-
getScalarValuesWindowMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a scalar window max value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar max value (a float)
-
getScalarValuesWindowMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a scalar window min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar min value (a float)
-
getTotalVoxelCount(self) → int¶ Gets the total size of all labels.
Returns: output (int) – the total size (a int64_t)
-
getUseScalarValues(self) → bool¶ Returns: output (bool) –
-
getVoxelCount(self, iTIndex: int) → int¶ Gets the size of all labels for a given T value.
Parameters: iTIndex (int) – Returns: output (int) – the number of voxels in the MultiROI (a int64_t)
-
grid(self, celXSize: int, celYSize: int, celZSize: int, minT: int, maxT: int) → None¶ Parameters: - celXSize (int) –
- celYSize (int) –
- celZSize (int) –
- minT (int) –
- maxT (int) –
-
classmethod
imread(files)¶ Loads a MultiROI from files
Parameters: files (file) [count=[0, None]] – fully qualified file name list Returns: outMultiROI (ORSModel.ors.MultiROI) – the resulting MultiROI
-
classmethod
imreadDICOM(files)¶ Loads a MultiROI from files or folder contaning DICOM
Parameters: files (file) [count=[0, None]] – fully qualified file name list Returns: outMultiROI (ORSModel.ors.MultiROI) – the resulting MultiROI
-
classmethod
imreadDICOMFolder(folder)¶ Loads a MultiROI from folder of DICOM files
Parameters: folder (folder) – fully qualified folder Returns: outMultiROI (ORSModel.ors.MultiROI) – the resulting MultiROI
-
classmethod
imreadFolder(folder)¶ Loads a MultiROI from folder
Parameters: folder (folder) – fully qualified folder Returns: outMultiROI (ORSModel.ors.MultiROI) – the resulting MultiROI
-
imsave(fileName)¶ Save a MultiROI to file in the type specified by the extension
Parameters: fileName (file saving) – fully qualified file name Return: True or False Rtype: bool
-
imwrite(fileName)¶ Save a MultiROI to file in the type specified by the extension
Parameters: fileName (file saving) – fully qualified file name Return: True or False Rtype: bool
-
insertLabeledMultiROI(self, pLabeledMultiROI: ORSModel.ors.MultiROI, insertionLabel: int) → bool¶ Insert all the labels of aMultiROI starting at an insertion label.
Parameters: - pLabeledMultiROI (ORSModel.ors.MultiROI) – the MultiROI to insert (a MultiROI)
- insertionLabel (int) – the label at which the insertion begins (a uint32_t)
Returns: output (bool) – true if the operation succeeded, false otherwise
-
mapLabelsToColors(self, anILUT: ORSModel.ors.LookupTable) → None¶ Parameters: anILUT (ORSModel.ors.LookupTable) –
-
mapLabelsToDiscreteColors(self, anILUT: ORSModel.ors.LookupTable) → None¶ Parameters: anILUT (ORSModel.ors.LookupTable) –
-
mapScalarValuesToColors(self, pData: ORSModel.ors.Array, pHightlightOpacityValue: ORSModel.ors.ArrayFloat, pLMROpacityValue: ORSModel.ors.ArrayFloat, fMinDisplayableValue: float, fMaxDisplayableValue: float, anILUT: ORSModel.ors.LookupTable) → None¶ Parameters: - pData (ORSModel.ors.Array) –
- pHightlightOpacityValue (ORSModel.ors.ArrayFloat) –
- pLMROpacityValue (ORSModel.ors.ArrayFloat) –
- fMinDisplayableValue (float) –
- fMaxDisplayableValue (float) –
- anILUT (ORSModel.ors.LookupTable) –
-
mapScalarValuesToColorsWithRange(self, pData: ORSModel.ors.Array, fMinDisplayableValue: float, fMaxDisplayableValue: float, fMinSelectionRangeValue: float, fMaxSelectionRangeValue: float, hideOutOfRangeValues: bool, anILUT: ORSModel.ors.LookupTable) → None¶ ComputeMultiROI color table using scalar value.
Parameters: - pData (ORSModel.ors.Array) – the scalar value to use (an Array)
- fMinDisplayableValue (float) – the minimum value used for the LUT range (a double)
- fMaxDisplayableValue (float) – the maximum value used for the LUT range (a double)
- fMinSelectionRangeValue (float) – the minimum range value (a double)
- fMaxSelectionRangeValue (float) – the maximum range value (a double)
- hideOutOfRangeValues (bool) – indicate if the out of range value should be displayed (a bool)
- anILUT (ORSModel.ors.LookupTable) – the LookUpTable (a LookupTable)
-
mapScalarValuesToDiscreteColors(self, pData: ORSModel.ors.Array, pHightlightOpacityValue: ORSModel.ors.ArrayFloat, pLMROpacityValue: ORSModel.ors.ArrayFloat, nMinDisplayableValue: float, nMaxDisplayableValue: float, anILUT: ORSModel.ors.LookupTable) → None¶ Parameters: - pData (ORSModel.ors.Array) –
- pHightlightOpacityValue (ORSModel.ors.ArrayFloat) –
- pLMROpacityValue (ORSModel.ors.ArrayFloat) –
- nMinDisplayableValue (float) –
- nMaxDisplayableValue (float) –
- anILUT (ORSModel.ors.LookupTable) –
-
mergeLabels(self, targetLabel: int, sourceLabel: int) → bool¶ Merge a label into another one.
Parameters: - targetLabel (int) – the receiving label (a uint32_t)
- sourceLabel (int) – the source label (a uint32_t)
Returns: output (bool) – true if the operation succeeded, false otherwise
-
mergeLabelsIntersectingMultiROI(self, pInputMROI: ORSModel.ors.MultiROI) → bool¶ assign the label of all intersecting labels to the smallest label intersecting, per label
Parameters: pInputMROI (ORSModel.ors.MultiROI) – Returns: output (bool) – return true if labels where collapse
-
mergeLabelsIntersectingROI(self, pInputROI: ORSModel.ors.ROI) → bool¶ assign the label of all intersecting labels to the smallest label intersecting
Parameters: pInputROI (ORSModel.ors.ROI) – Returns: output (bool) – return true if labels where collapse
-
none()¶ MultiROI.__init__() -> MultiROI
-
removeAScalarValuesSlot(self, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Remove a scalar values slot from aMultiROI.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the T value (a uint32_t)
-
removeEmptyLabelsAndRenumber(self) → None¶ Removes all empty labels and renumber the remaining labels in the same order.
-
removeFromVolumeROI(self, pOutputROI: ORSModel.ors.ROI, pLabel: int) → None¶ Remove all the voxels associated to a label from a VolumeROI.
Parameters: - pOutputROI (ORSModel.ors.ROI) – the output Volume ROI (an ROI)
- pLabel (int) – the label to extract (a uint32_t)
-
removeLabelAndRenumber(self, pLabel: int) → None¶ Removes the specified label and renumber the remaining labels in the same order.
Parameters: pLabel (int) – the label to remove (a uint32_t)
-
removeLabelIntersectingROI(self, pInputROI: ORSModel.ors.ROI) → bool¶ Remove label that are intersecting the givenROI.
Parameters: pInputROI (ORSModel.ors.ROI) – Returns: output (bool) – return true if label where removed (a bool)
-
removeLabelNotIntersectingROI(self, pInputROI: ORSModel.ors.ROI) → bool¶ Remove label that are not intersecting the givenROI.
Parameters: pInputROI (ORSModel.ors.ROI) – Returns: output (bool) – return true if label where removed (a bool)
-
removeLabeledMultiROI(self, pInputLabeledMultiROI: ORSModel.ors.MultiROI) → None¶ Removes aMultiROI.
Parameters: pInputLabeledMultiROI (ORSModel.ors.MultiROI) – the MultiROI to remove (a MultiROI)
-
removeLabelsAndRenumber(self, pLabelArray: ORSModel.ors.ArrayUnsignedLong) → None¶ Removes the specified labels and renumber the remaining labels in the same order.
Parameters: pLabelArray (ORSModel.ors.ArrayUnsignedLong) – an array of labels to remove (an ArrayUnsignedLong)
-
removeVolumeROI(self, pInputROI: ORSModel.ors.ROI) → None¶ Removes a VolumeROI.
Parameters: pInputROI (ORSModel.ors.ROI) – the Volume ROI to remove (an ROI)
-
removeVolumeROIFromLabel(self, aLabel: int, pROI: ORSModel.ors.ROI) → bool¶ Parameters: - aLabel (int) –
- pROI (ORSModel.ors.ROI) –
Returns: output (bool) –
-
setCurrentScalarValuesSlot(self, nScalarValueSlotIndex: int) → None¶ Sets the current scalar.
Note
The scalar index is zero-based, and thus should be less than getScalarValuesSlotCount().
Parameters: nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
-
setHideOutOfRangeScalarValues(self, value: bool) → None¶ Indicate if out of range values should be hidden.
Parameters: value (bool) –
-
setLabelColor(self, label: int, IColor: ORSModel.ors.Color) → None¶ Parameters: - label (int) –
- IColor (ORSModel.ors.Color) –
-
setLabelCount(self, aCount: int) → None¶ Sets the label count.
Parameters: aCount (int) – the label count to set (a uint32_t)
-
setScalarValueDescription(self, nScalarValueSlotIndex: int, sDesc: str, iTIndex: int) → None¶ Sets a face scalar description value.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (a uint16_t)
- sDesc (str) – scalar description value (a std::wstring)
- iTIndex (int) – time step (a uint32_t)
-
setScalarValueMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a scalar max value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the scalar max value (a float)
- iTIndex (int) – the time step (a uint32_t)
-
setScalarValueMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a scalar min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the scalar min value (a float)
- iTIndex (int) – the time step (a uint32_t)
-
setScalarValueOffset(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a scalar offset value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the scalar offset value (a float)
- iTIndex (int) – the time step (a uint32_t)
-
setScalarValueSlope(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a scalar slope value.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (a uint16_t)
- value (float) – scalar slope value (a float)
- iTIndex (int) – time step (a uint32_t)
-
setScalarValueSlotLookUpTable(self, lookUpTable: dict, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Parameters: - lookUpTable (dict) –
- nScalarValueSlotIndex (int) –
- iTIndex (int) –
-
setScalarValueUnit(self, nScalarValueSlotIndex: int, iUnit: int, iTIndex: int) → None¶ Sets a scalar unit value.
Parameters: - nScalarValueSlotIndex (int) – scalar slot index (a uint16_t)
- iUnit (int) – iUnit (a uint16_t)
- iTIndex (int) – time step (a uint32_t)
-
setScalarValues(self, pScalarValues: ORSModel.ors.Array, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Sets the values of a scalar.
Parameters: - pScalarValues (ORSModel.ors.Array) – an array of values (example an ArrayFloat)
- nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the the time step (a uint32_t)
-
setScalarValuesDatatype(self, iSlotIndex: int, iTIndex: int, nFaceScalarValuesDatatype: int) → None¶ Parameters: - iSlotIndex (int) –
- iTIndex (int) –
- nFaceScalarValuesDatatype (int) –
-
setScalarValuesFromPandaDataFrame(dataFrame, iTIndex=0)¶
-
setScalarValuesRangeBoundaryMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a scalar range max boundary value.
Parameters: - nScalarValueSlotIndex (int) – the slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step(a uint32_t)
-
setScalarValuesRangeBoundaryMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a scalar range min boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setScalarValuesRangeMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a scalar range max value.
Parameters: - nScalarValueSlotIndex (int) – the slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step(a uint32_t)
-
setScalarValuesRangeMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a scalar range min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (auint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setScalarValuesSlotCount(self, nScalarValueSlotCount: int) → None¶ Sets the number of slots for scalar values.
Parameters: nScalarValueSlotCount (int) – the number of slots (a uint16_t)
-
setScalarValuesWindowMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a scalar window max value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the scalar max value (a float)
- iTIndex (int) – the time step (a uint32_t)
-
setScalarValuesWindowMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a scalar window min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the scalar min value (a float)
- iTIndex (int) – the time step (a uint32_t)
-
sortAndRenumberLabelsOnSize(self, bAscending: bool, bRemoveEmptyLabels: bool) → None¶ Sorts and renumbers the labels based on their sizes (number of labels).
Parameters: - bAscending (bool) – TRUE to sort in ascending order, FALSE to sort in descending order
- bRemoveEmptyLabels (bool) – TRUE to remove empty labels, FALSE to keep them
-
updateUndo()¶
-
MultiROIAnalyzer¶
-
class
ORSModel.ors.MultiROIAnalyzer¶ Bases:
ORSModel.ors.Unmanagedbrief_description: Analyzer for multi-ROIs. author: Nicolas Piché. All other members of ORS participated. version: 1.0 date: May 2010
-
computeStatisticsFor(self, IChannel: ORSModel.ors.Channel, pTimeStep: int, IROI: ORSModel.ors.ROI, IProgress: ORSModel.ors.Progress) → None¶ Parameters: - IChannel (ORSModel.ors.Channel) –
- pTimeStep (int) –
- IROI (ORSModel.ors.ROI) –
- IProgress (ORSModel.ors.Progress) –
-
getCenterOfMassMinMax(self, pXMin: float, pYMin: float, pZMin: float, pXMax: float, pYMax: float, pZMax: float) → None¶ Parameters: - pXMin (float) –
- pYMin (float) –
- pZMin (float) –
- pXMax (float) –
- pYMax (float) –
- pZMax (float) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getDataHistogramInRangeForLabels(self, IChannel: ORSModel.ors.Channel, IMultiROI: ORSModel.ors.MultiROI, IListOfLabels: ORSModel.ors.ArrayUnsignedLong, tChannel: int, tLMR: int, bins: int, pMinRange: float, pMaxRange: float) → ArrayUnsignedLONGLONG¶ Parameters: - IChannel (ORSModel.ors.Channel) –
- IMultiROI (ORSModel.ors.MultiROI) –
- IListOfLabels (ORSModel.ors.ArrayUnsignedLong) –
- tChannel (int) –
- tLMR (int) –
- bins (int) –
- pMinRange (float) –
- pMaxRange (float) –
Returns: output (ORSModel.ors.ArrayUnsignedLONGLONG) –
-
getEquivalentRadiusMinMax(self, pMin: float, pMax: float) → None¶ Parameters: - pMin (float) –
- pMax (float) –
-
getFeretLengthMax(self) → ArrayDouble¶ Gets maximum feret size.
Returns: output (ORSModel.ors.ArrayDouble) – feret maximum size (an ArrayDouble)
-
getFeretLengthMean(self) → ArrayDouble¶ Gets medium feret size.
Returns: output (ORSModel.ors.ArrayDouble) – feret medium size (an ArrayDouble)
-
getFeretLengthMin(self) → ArrayDouble¶ Gets minimum feret size.
Returns: output (ORSModel.ors.ArrayDouble) – feret minimum size (an ArrayDouble)
-
getFeretLengthMinOrtho(self) → ArrayDouble¶ Gets minimum orthogonal feret diameter.
Returns: output (ORSModel.ors.ArrayDouble) – feret minimum orthogonal (an ArrayDouble)
-
getIndiciesCountInLabels(self) → ArrayLONGLONG¶ Returns: output (ORSModel.ors.ArrayLONGLONG) –
-
getLabelAspectRatio(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelCenterOfMass(self, pLabel: int) → Vector3¶ Parameters: pLabel (int) – Returns: output (ORSModel.ors.Vector3) –
-
getLabelEntropy(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelEquivalentRadius(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelInertiaEigenValue(self, pLabel: int, vectorIndex: int) → float¶ Gets the eigenvalue of the inertia tensor for the specified label and eigenvalue index.
Parameters: - pLabel (int) – label (a uint32_t)
- vectorIndex (int) – eigenvalue index (0: minimum eigenvalue; 1: medium eigenvalue; 2: maximum eigenvalue) (a uint16_t)
Returns: output (float) – the eigenvalue (a double)
-
getLabelInertiaEigenValueMax(self, pLabel: int) → float¶ Gets the maximum eigenvalue of the inertia tensor for the specified label.
Parameters: pLabel (int) – label (a uint32_t) Returns: output (float) – the eigenvalue (a double)
-
getLabelInertiaEigenValueMed(self, pLabel: int) → float¶ Gets the medium eigenvalue of the inertia tensor for the specified label.
Parameters: pLabel (int) – label (a uint32_t) Returns: output (float) – the eigenvalue (a double)
-
getLabelInertiaEigenValueMin(self, pLabel: int) → float¶ Gets the minimum eigenvalue of the inertia tensor for the specified label.
Parameters: pLabel (int) – label (a uint32_t) Returns: output (float) – the eigenvalue (a double)
-
getLabelInertiaEigenVector(self, pLabel: int, vectorIndex: int) → Vector3¶ Gets the eigenvector associated to an eigenvalue index of the inertia tensor for the specified label.
Parameters: - pLabel (int) – label (a uint32_t)
- vectorIndex (int) – eigenvalue index (0: minimum eigenvalue; 1: medium eigenvalue; 2: maximum eigenvalue) (a uint16_t)
Returns: output (ORSModel.ors.Vector3) – the eigenvector (a Vector3)
-
getLabelInertiaEigenVectorWithMaxEigenValue(self, pLabel: int) → Vector3¶ Gets the eigenvector associated to the maximum eigenvalue of the inertia tensor for the specified label.
Parameters: pLabel (int) – label (a uint32_t) Returns: output (ORSModel.ors.Vector3) – the eigenvector (a Vector3)
-
getLabelInertiaEigenVectorWithMedEigenValue(self, pLabel: int) → Vector3¶ Gets the eigenvector associated to the medium eigenvalue of the inertia tensor for the specified label.
Parameters: pLabel (int) – label (a uint32_t) Returns: output (ORSModel.ors.Vector3) – the eigenvector (a Vector3)
-
getLabelInertiaEigenVectorWithMinEigenValue(self, pLabel: int) → Vector3¶ Gets the eigenvector associated to the minimum eigenvalue of the inertia tensor for the specified label.
Parameters: pLabel (int) – label (a uint32_t) Returns: output (ORSModel.ors.Vector3) – the eigenvector (a Vector3)
-
getLabelInertiaEigenVectorWithMinEigenValuePhiAngle(self, pLabel: int) → float¶ Gets the phi angle for the eigenvector associated to the minimum eigenvalue of the inertia tensor for the specified label. It is the angle from the X axis of the projection on the XZ plane of that orientation.
Parameters: pLabel (int) – label (a uint32_t) Returns: output (float) – the phi angle in radian (a double)
-
getLabelInertiaEigenVectorWithMinEigenValueThetaAngle(self, pLabel: int) → float¶ Gets the theta angle for the eigenvector associated to the minimum eigenvalue of the inertia tensor for the specified label. It is the angle from the X axis of the projection on the XY plane of that orientation.
Parameters: pLabel (int) – label (a uint32_t) Returns: output (float) – the theta angle in radian (a double)
-
getLabelMaximumVoxel(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelMeanVoxel(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelMinimumVoxel(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelSizeMinMax(self, pMin: int, pMax: int) → None¶ Parameters: - pMin (int) –
- pMax (int) –
-
getLabelSphericity(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelStandardDeviationVoxel(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelSurfaceArea(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelSurfaceXArea(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelSurfaceYArea(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelSurfaceZArea(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelVarianceVoxel(self, pLabel: int) → float¶ Parameters: pLabel (int) – Returns: output (float) –
-
getLabelWeightedCenterOfMass(self, pLabel: int) → Vector3¶ Parameters: pLabel (int) – Returns: output (ORSModel.ors.Vector3) –
-
getLabelsAspectRatio(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsCenterOfMassX(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsCenterOfMassY(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsCenterOfMassZ(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsContinueSurfaceArea(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsEntropy(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsEquivalentRadius(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsInertiaEigenValueMax(self) → ArrayDouble¶ Gets the maximum eigenvalues of the inertia tensor.
Returns: output (ORSModel.ors.ArrayDouble) – the eigenvalues (an ArrayDouble)
-
getLabelsInertiaEigenValueMed(self) → ArrayDouble¶ Gets the medium eigenvalues of the inertia tensor.
Returns: output (ORSModel.ors.ArrayDouble) – the eigenvalues (an ArrayDouble)
-
getLabelsInertiaEigenValueMin(self) → ArrayDouble¶ Gets the minimum eigenvalues of the inertia tensor.
Returns: output (ORSModel.ors.ArrayDouble) – the eigenvalues (an ArrayDouble)
-
getLabelsInertiaEigenVectorWithMinEigenValuePhiAngle(self) → ArrayDouble¶ Gets the phi angle for the eigenvector associated to the minimum eigenvalue of the inertia tensor for each label.
Returns: output (ORSModel.ors.ArrayDouble) – the phi angles in radian (an ArrayDouble)
-
getLabelsInertiaEigenVectorWithMinEigenValueThetaAngle(self) → ArrayDouble¶ Gets the theta angle for the eigenvector associated to the minimum eigenvalue of the inertia tensor for each label.
Returns: output (ORSModel.ors.ArrayDouble) – the theta angles in radian (an ArrayDouble)
-
getLabelsMaxLocationX(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsMaxLocationY(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsMaxLocationZ(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsMaximumVoxel(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsMeanVoxel(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsMinLocationX(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsMinLocationY(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsMinLocationZ(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsMinimumVoxel(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsSphericity(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsStandardDeviationVoxel(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsSurfaceArea(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsSurfaceXArea(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsSurfaceYArea(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsSurfaceZArea(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsVarianceVoxel(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsWeightedCenterOfMassX(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsWeightedCenterOfMassY(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getLabelsWeightedCenterOfMassZ(self) → ArrayDouble¶ Returns: output (ORSModel.ors.ArrayDouble) –
-
getMaximumVoxelMinMax(self, pMin: float, pMax: float) → None¶ Parameters: - pMin (float) –
- pMax (float) –
-
getMeanVoxelMinMax(self, pMin: float, pMax: float) → None¶ Parameters: - pMin (float) –
- pMax (float) –
-
getMinimumVoxelMinMax(self, pMin: float, pMax: float) → None¶ Parameters: - pMin (float) –
- pMax (float) –
-
getNumberOfROIIndiciesInLabel(self, pLabel: int) → int¶ Parameters: pLabel (int) – Returns: output (int) –
-
getNumberOfROIIndiciesInLabelsMinMax(self, pMin: int, pMax: int) → None¶ Parameters: - pMin (int) –
- pMax (int) –
-
getSphericityMinMax(self, pMin: float, pMax: float) → None¶ Parameters: - pMin (float) –
- pMax (float) –
-
getStandardDeviationVoxelMinMax(self, pMin: float, pMax: float) → None¶ Parameters: - pMin (float) –
- pMax (float) –
-
getSurfaceAreaMax(self) → float¶ Returns: output (float) –
-
getSurfaceAreaMin(self) → float¶ Returns: output (float) –
-
getSurfaceAreaMinMax(self, pMin: float, pMax: float) → None¶ Parameters: - pMin (float) –
- pMax (float) –
-
getSurfaceXAreaMax(self) → float¶ Returns: output (float) –
-
getSurfaceXAreaMin(self) → float¶ Returns: output (float) –
-
getSurfaceYAreaMax(self) → float¶ Returns: output (float) –
-
getSurfaceYAreaMin(self) → float¶ Returns: output (float) –
-
getSurfaceZAreaMax(self) → float¶ Returns: output (float) –
-
getSurfaceZAreaMin(self) → float¶ Returns: output (float) –
-
getVarianceVoxelMinMax(self, pMin: float, pMax: float) → None¶ Parameters: - pMin (float) –
- pMax (float) –
-
getWeightedCenterOfMassMinMax(self, pXMin: float, pYMin: float, pZMin: float, pXMax: float, pYMax: float, pZMax: float) → None¶ Parameters: - pXMin (float) –
- pYMin (float) –
- pZMin (float) –
- pXMax (float) –
- pYMax (float) –
- pZMax (float) –
-
initializeFor(self, IMultiROI: ORSModel.ors.MultiROI, pStats: int, pCompute2DStats: bool) → None¶ Parameters: - IMultiROI (ORSModel.ors.MultiROI) –
- pStats (int) –
- pCompute2DStats (bool) –
-
none()¶ MultiROIAnalyzer.__init__() -> MultiROIAnalyzer
-
Node¶
-
class
ORSModel.ors.Node¶ Bases:
ORSModel.ors.Managedbrief_description: An abstract class for any object that can be a node in the visualization flow. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005
-
attachChild(self, anINode: ORSModel.ors.Node) → bool¶ Attaches a child node.
Note
Certain parent-child relationships are forbidden, hence the need to verify the result.
Note
Calling this method several times will still result in the child node only appearing once in its parent.
Parameters: anINode (ORSModel.ors.Node) – the node to attach (a Node) Returns: output (bool) – true if child was attached, false otherwise
-
attachChildAtPosition(self, anINode: ORSModel.ors.Node, position: int) → bool¶ Attaches a child node at a given position.
Note
Certain parent-child relationships are forbidden, hence the need to verify the result.
Note
Calling this method several times will still result in the child node only appearing once in its parent.
Parameters: - anINode (ORSModel.ors.Node) – the node to attach (a Node)
- position (int) – the position index (a uint32_t)
Returns: output (bool) – true if child was attached, false otherwise
-
copyGraph(self) → Node¶ Returns a copy of the node, including its graph.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Returns: output (ORSModel.ors.Node) – a new node (a Node)
-
detachChild(self, anINode: ORSModel.ors.Node) → bool¶ Detaches a child node.
Parameters: anINode (ORSModel.ors.Node) – the node to detach (a Node) Returns: output (bool) – true if child was detached, false otherwise
-
getAllChildrenNodes(self) → List¶ Returns a flattened list of the child hierarchy of the node.
Note
The child hierarchy is flattened.
Note
Expect no particular ordering of the nodes.
Returns: output (ORSModel.ors.List) – a list of all nodes below the node (a List)
-
getAllChildrenOfClass(self, pProgId: str) → List¶ Returns all the nodes of the specified class found in the child hierarchy.
Note
Result will be an empty list if no match is found.
Note
The search is done breadth-first.
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.List) – a list of nodes (a List)
-
getAllChildrenOfClassReachableByRenderer(self, pProgId: str) → List¶ Returns a flattened list of all the child nodes, of the given class, that are renderable.
Note
The list contains only Managed objects (they will need to be typecast to the appropriate class).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.List) – a list of all child nodes that can be rendered (an List)
-
getAllParentNodes(self) → List¶ Returns a flattened list of the parent hierarchy of the node.
Note
The parent hierarchy is flattened.
Note
Expect no particular ordering of the nodes.
Returns: output (ORSModel.ors.List) – a list of all nodes above the node (an List)
-
getAllParentsOfClass(self, pProgId: str) → List¶ Returns all the nodes of the specified class found in the parent hierarchy.
Note
Result will be an empty list if no match is found.
Note
The search is done breadth-first.
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.List) – a list of nodes (an List)
-
getChildWithGUID(self, aGUID: str) → Node¶ Gets an immediate child node with the given GUID.
Note
Only immediate children are searched.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Parameters: aGUID (str) – a GUID (a string) Returns: output (ORSModel.ors.Node) – a child node if found (a Node), none() otherwise
-
getChildWithTitle(self, aTitle: str) → Node¶ Gets an immediate child node with the given title.
Note
Only immediate children are searched.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Parameters: aTitle (str) – a string (a string) Returns: output (ORSModel.ors.Node) – a child node if found (a Node), none() otherwise
-
getChildrenNodes(self) → List¶ Returns the list of immediate child nodes.
Returns: output (ORSModel.ors.List) – a list of nodes (an List)
-
getChildrenOfClass(self, pProgId: str) → List¶ Returns the nodes of the specified class found in the immediate children.
Note
Result will be an empty list if no match is found.
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.List) – a list of nodes (an List)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirstChildOfClass(self, pProgId: str) → Node¶ Returns the first object of the specified class found in the child hierarchy.
Note
The search is done breadth-first.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.Node) – a node if one exists (a Node), none() otherwise
-
getFirstChildOfClassAndPrivateTitle(self, pProgId: str, privateTitle: str) → Node¶ Searches the hierarchy for a child node with the specified class and private title.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: - pProgId (str) – the ProgId of the class to test against (a string)
- privateTitle (str) – some text (a string)
Returns: output (ORSModel.ors.Node) – a node if it exists (a Node), none() otherwise
-
getFirstNodeWithClassNameTowardsNode(self, pProgId: str, anINode: ORSModel.ors.Node) → Node¶ Searches the hierarchy for a parent node with the specified class toward a specific parent nopde.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: - pProgId (str) – the ProgId of the class to test against (a string)
- anINode (ORSModel.ors.Node) – a target node
Returns: output (ORSModel.ors.Node) – a node if it exists (a Node), none() otherwise
-
getFirstParentOfClass(self, pProgId: str) → Node¶ Returns the first object of the specified class found in the parent hierarchy.
Note
The search is done breadth-first.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.Node) – a node if one exists (a Node), none() otherwise
-
getFirstParentOfClassAndPrivateTitle(self, pProgId: str, privateTitle: str) → Node¶ Searches the hierarchy for a parent node with the specified class and private title.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: - pProgId (str) – the ProgId of the class to test against (a string)
- privateTitle (str) – some text (a string)
Returns: output (ORSModel.ors.Node) – a node if it exists (a Node), none() otherwise
-
getImmediateChildOfClass(self, pProgId: str) → Node¶ Searches for a child node with the specified class.
Note
Only the immediate children are searched, not the hierarchy.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.Node) – a node if it exists (a Node), none() otherwise
-
getImmediateParentOfClass(self, pProgId: str) → Node¶ Searches for a parent node with the specified class.
Note
Only the immediate parents are searched, not the hierarchy.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.Node) – a node if it exists (a Node), none() otherwise
-
getImmediateParentWithGUID(self, pGUID: str) → Node¶ Gets a parent node with the given GUID.
Note
Only immediate parents are searched.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Parameters: pGUID (str) – a GUID (a string) Returns: output (ORSModel.ors.Node) – a parent node if found (a Node), none() otherwise
-
getIsNodeOneOfMyAscendants(self, anINode: ORSModel.ors.Node) → bool¶ Checks to see if a specified node is in the parent hierarchy of the node.
Note
The parent hierarchy is searched in its entirety for the specified node.
Note
The search is conducted depth-first.
Parameters: anINode (ORSModel.ors.Node) – Returns: output (bool) – true if the specified node in the parent hierarchy, false otherwise
-
getIsNodeOneOfMyDescendants(self, anINode: ORSModel.ors.Node) → bool¶ Checks to see if a specified node is in the child hierarchy of the node.
Note
The child hierarchy is searched in its entirety for the specified node.
Note
The search is conducted depth-first.
Parameters: anINode (ORSModel.ors.Node) – Returns: output (bool) – true if the specified node in the child hierarchy, false otherwise
-
getMaxTSize(self) → int¶ Get Maximum T Size of all children node of this node.
Returns: output (int) –
-
getParentNodes(self) → List¶ Gets the immediate parent nodes.
Returns: output (ORSModel.ors.List) – a list of nodes (a List)
-
getParentWithGUID(self, pGUID: str) → Node¶ Gets a parent node (from the hierarchy) with the given GUID.
Note
The whole parent hierarchy is searched.
Note
The search is done breadth-first.
Note
You can type the return value of this method to any subclass of ORSNode, if you know the class of the object being retrieved. If its class doesn’t match the type specified the return will be none().
Parameters: pGUID (str) – a GUID (a string) Returns: output (ORSModel.ors.Node) – a parent node if found (a Node), none() otherwise
-
getParentsOfClass(self, pProgId: str) → List¶ Returns the nodes of the specified class found in the immediate parents.
Note
Result will be an empty list if no match is found.
Note
Use constants defined in ORS_def.h for ProgIds (ex: ORSFrameProgId).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.List) – a list of nodes (a List)
-
none()¶ Node.__init__() -> Node
-
propagateDataDirty(includeSelf=False)¶ Calls for a propagateDirty with the flag OrsDataDirty
Parameters: includeSelf (bool) – True includes the receiver in the propagation, False doesn’t
-
propagateDirty(self, dirtyFlag: str, includeSelf: bool) → None¶ Causes a dirty message to be sent to all children nodes.
Note
See ORS_def.h for default dirty flag (ex: ORSDataDirty).
Note
A dirty message has different results for different objects, but generally causes a refresh on the data.
Note
Message propagation is done depth-first.
Parameters: - dirtyFlag (str) – a string dirty flag (a string)
- includeSelf (bool) – should set this dirty (a bool)
-
propagateGeometryDirty(includeSelf=False)¶ Calls for a propagateDirty with the flag OrsGeometryDirty
Parameters: includeSelf (bool) – True includes the receiver in the propagation, False doesn’t
-
propagatePropertyDirty(includeSelf=False)¶ Calls for a propagateDirty with the flag OrsPropertyDirty
Parameters: includeSelf (bool) – True includes the receiver in the propagation, False doesn’t
-
propagateVisibilityDirty(includeSelf=False)¶ Calls for a propagateDirty with the flag OrsVisibilityDirty
Parameters: includeSelf (bool) – True includes the receiver in the propagation, False doesn’t
-
refresh()¶ Refreshes the views related to the current object
-
refreshAll2DParentViews(self) → None¶ Causes all 3D views in the parent hierarchy of the node to be refreshed.
-
refreshAll3DParentViews(self) → None¶ Causes all 3D views in the parent hierarchy of the node to be refreshed.
-
refreshAllParentViews(self) → None¶ Causes all views in the parent hierarchy of the node to be refreshed.
-
setAllowRenderingInAllParentViews(self, bValue: bool) → None¶ Allows or prevents rendering in the views affected by a node.
Parameters: bValue (bool) – true to allow rendering, false to disallow it.
-
switchOrderOfPrecedenceOfChildrenNodes(self, anINode1: ORSModel.ors.Node, anINode2: ORSModel.ors.Node) → bool¶ Rearranges the order of child nodes.
Note
When child nodes are not in the desired order, they can be switched with this method (for example, the order in which they are rendered can be undesired).
Note
Both nodes are swapped in the list of nodes. For example, if nodes are A B C D and this call is made switchOrderOfPrecedenceOfChildrenNodes(A, C), the nodes are then in this order: C B A D.
Note
This method dives down in the child hierarchy until it finds a node where both arguments appear, then performs the switch at that level.
Parameters: - anINode1 (ORSModel.ors.Node) – a child node (a Node)
- anINode2 (ORSModel.ors.Node) – a child node (a Node)
Returns: output (bool) – true if successful, false otherwise
-
switchOrderOfPrecedenceOfParentNodes(self, anINode1: ORSModel.ors.Node, anINode2: ORSModel.ors.Node) → bool¶ Rearranges the ordering of immediate parent nodes.
Note
When parent nodes are not in the desired order, they can be switched with this method.
Note
Both nodes are swapped in the list of nodes. For example, if nodes are A B C D and this call is made switchOrderOfPrecedenceOfParentNodes(A, C), the nodes are then in this order: C B A D.
Note
This method acts only on immediate parent nodes, not the entire parent hierarchy.
Parameters: - anINode1 (ORSModel.ors.Node) – a parent node (a Node)
- anINode2 (ORSModel.ors.Node) – a parent node (a Node)
Returns: output (bool) – true if successful, false otherwise
-
ORSBaseClass¶
-
class
ORSModel.ors.ORSBaseClass¶ Bases:
sip.wrapper-
getPythonTraceBack() → typing.List[str]¶ Set the python traceback for a call from python.
Returns: output (typing.List[str]) –
-
isManaged(self) → bool¶ Returns: output (bool) –
-
isNone(self) → bool¶ Returns: output (bool) –
-
setPythonTraceBack(tb: ORSModel.ors.typing.List[str]) → None¶ Set the python traceback for a call from python.
Parameters: tb (typing.List[str]) –
-
Octree¶
-
class
ORSModel.ors.Octree¶ Bases:
ORSModel.ors.Node-
buildOctreeBox(self, pGrid: ORSModel.ors.UnstructuredGrid, iTIndex: int, bAppend: bool) → None¶ Parameters: - pGrid (ORSModel.ors.UnstructuredGrid) –
- iTIndex (int) –
- bAppend (bool) –
-
buildOctreeBoxMultiThread(self, pGrid: ORSModel.ors.UnstructuredGrid, iTIndex: int, bAppend: bool) → None¶ Parameters: - pGrid (ORSModel.ors.UnstructuredGrid) –
- iTIndex (int) –
- bAppend (bool) –
-
buildSpheresOctreeBox(self, pCollection: ORSModel.ors.SequenceableCollection, boxThatContainTheSpheres: ORSModel.ors.Box, iTIndex: int, bAppend: bool) → None¶ Parameters: - pCollection (ORSModel.ors.SequenceableCollection) –
- boxThatContainTheSpheres (ORSModel.ors.Box) –
- iTIndex (int) –
- bAppend (bool) –
-
getAtomsForPoint(self, x: float, y: float, z: float, iTIndex: int) → ArrayLong¶ Parameters: - x (float) –
- y (float) –
- z (float) –
- iTIndex (int) –
Returns: output (ORSModel.ors.ArrayLong) –
-
getAtomsIntersectingBoundedPlane(self, aBoundedPlane: ORSModel.ors.Rectangle, iTIndex: int) → List¶ Parameters: - aBoundedPlane (ORSModel.ors.Rectangle) –
- iTIndex (int) –
Returns: output (ORSModel.ors.List) –
-
getAtomsIntersectingBox(self, aBox: ORSModel.ors.Box, iTIndex: int) → List¶ Parameters: - aBox (ORSModel.ors.Box) –
- iTIndex (int) –
Returns: output (ORSModel.ors.List) –
-
getAtomsIntersectingLine(self, aLine: ORSModel.ors.Line, iTIndex: int) → List¶ Parameters: - aLine (ORSModel.ors.Line) –
- iTIndex (int) –
Returns: output (ORSModel.ors.List) –
-
getAtomsIntersectingPlane(self, a: float, b: float, c: float, d: float, iTIndex: int) → List¶ Parameters: - a (float) –
- b (float) –
- c (float) –
- d (float) –
- iTIndex (int) –
Returns: output (ORSModel.ors.List) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
isEqualTo(self, anOctree: ORSModel.ors.Octree, iTIndex: int) → bool¶ Parameters: - anOctree (ORSModel.ors.Octree) –
- iTIndex (int) –
Returns: output (bool) –
-
none()¶ Octree.__init__() -> Octree
-
OpticalFlow¶
-
class
ORSModel.ors.OpticalFlow¶ Bases:
ORSModel.ors.Unmanaged-
computeAverageSpeedAndRotation(self, bUsePonderationByIntensityIm1: bool, pAverageSpeedX: float, pAverageSpeedY: float, pAverageSpeedZ: float, pAverageRotationAroundZ: float, pBarycenterX: float, pBarycenterY: float) → None¶ Parameters: - bUsePonderationByIntensityIm1 (bool) –
- pAverageSpeedX (float) –
- pAverageSpeedY (float) –
- pAverageSpeedZ (float) –
- pAverageRotationAroundZ (float) –
- pBarycenterX (float) –
- pBarycenterY (float) –
-
computeOpticalFlow(self) → None¶
-
createGaussianPyramid(self, pIOutChannelsGaussianPyramidIm1: ORSModel.ors.Channel, pIOutChannelsGaussianPyramidIm2: ORSModel.ors.Channel, pNumberOfLevels: int) → None¶ Parameters: - pIOutChannelsGaussianPyramidIm1 (ORSModel.ors.Channel) –
- pIOutChannelsGaussianPyramidIm2 (ORSModel.ors.Channel) –
- pNumberOfLevels (int) –
-
findMaximalLevelGaussianPyramid(self) → int¶ Returns: output (int) –
-
findMaximalLevelGaussianPyramidChannelAWithChannelB(self, pIBoundingBoxSearchArea: ORSModel.ors.Box) → int¶ Parameters: pIBoundingBoxSearchArea (ORSModel.ors.Box) – Returns: output (int) –
-
findMaximalLevelGaussianPyramidForThisImageSize(self, sizeX: int, sizeY: int, sizeZ: int, bPerformZReduction: bool) → int¶ Parameters: - sizeX (int) –
- sizeY (int) –
- sizeZ (int) –
- bPerformZReduction (bool) –
Returns: output (int) –
-
findMinimalLevelGaussianPyramidForGivenPrecision(self, pIBoundingBoxReferenceIm1: ORSModel.ors.Box, pIBoundingBoxSearchArea: ORSModel.ors.Box, minimalDistanceToStopOpticalFlow: float, minimalRotationToStopOpticalFlow: float, maximalNumberOfIterationsOpticalFlow: int, acceptableRelativeError: float) → int¶ Parameters: - pIBoundingBoxReferenceIm1 (ORSModel.ors.Box) –
- pIBoundingBoxSearchArea (ORSModel.ors.Box) –
- minimalDistanceToStopOpticalFlow (float) –
- minimalRotationToStopOpticalFlow (float) –
- maximalNumberOfIterationsOpticalFlow (int) –
- acceptableRelativeError (float) –
Returns: output (int) –
-
getChannelIm1(self) → Channel¶ Returns: output (ORSModel.ors.Channel) –
-
getChannelIm2(self) → Channel¶ Returns: output (ORSModel.ors.Channel) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFactorRegularizationSpeedCorrection(self) → float¶ Returns: output (float) –
-
getLastDisplacementRegistration2DTransformation(self, pAverageSpeedX: float, pAverageSpeedY: float, pAverageRotationAroundZ: float, pBarycenterX: float, pBarycenterY: float) → None¶ Parameters: - pAverageSpeedX (float) –
- pAverageSpeedY (float) –
- pAverageRotationAroundZ (float) –
- pBarycenterX (float) –
- pBarycenterY (float) –
-
getMaxLevelGaussianPyramid(self) → int¶ Returns: output (int) –
-
getMaximalConditionValueRegularizedAtransposeA(self) → float¶ Returns: output (float) –
-
getMinLevelGaussianPyramid(self) → int¶ Returns: output (int) –
-
getOriginPixelsAverageSpeedIm1(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
getOriginPixelsIm1(self, x: int, y: int, z: int, t: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
- t (int) –
-
getOriginPixelsIm2(self, x: int, y: int, z: int, t: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
- t (int) –
-
getPatchWindowHalfsize(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
getPerformZReduction(self) → bool¶ Returns: output (bool) –
-
getSizeImagesPixels(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
getSizePixelsAverageSpeed(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
getUpsampleSpeedToSameSizeAsBaseChannel(self) → bool¶ Returns: output (bool) –
-
getUseBrightnessCorrectionFactors(self, pValueLinearFactor: bool, pValueConstantFactor: bool) → None¶ Parameters: - pValueLinearFactor (bool) –
- pValueConstantFactor (bool) –
-
getUseRotationAroundZ(self) → bool¶ Returns: output (bool) –
-
getUseTranslationX(self) → bool¶ Returns: output (bool) –
-
getUseTranslationY(self) → bool¶ Returns: output (bool) –
-
getXSpeed(self) → Channel¶ Returns: output (ORSModel.ors.Channel) –
-
getYSpeed(self) → Channel¶ Returns: output (ORSModel.ors.Channel) –
-
getZSpeed(self) → Channel¶ Returns: output (ORSModel.ors.Channel) –
-
none()¶ OpticalFlow.__init__() -> OpticalFlow
-
registration2DTransformation(self, pIBoundingBoxReferenceIm1: ORSModel.ors.Box, pIBoundingBoxSearchArea: ORSModel.ors.Box, minimalDistanceToStopOpticalFlow: float, minimalRotationToStopOpticalFlow: float, maximalNumberOfIterationsOpticalFlow: int, bApplyTransformation: bool, IProgress: ORSModel.ors.Progress) → Matrix4x4¶ Parameters: - pIBoundingBoxReferenceIm1 (ORSModel.ors.Box) –
- pIBoundingBoxSearchArea (ORSModel.ors.Box) –
- minimalDistanceToStopOpticalFlow (float) –
- minimalRotationToStopOpticalFlow (float) –
- maximalNumberOfIterationsOpticalFlow (int) –
- bApplyTransformation (bool) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.Matrix4x4) –
-
setChannelIm1(self, pIInputChannel: ORSModel.ors.Channel) → None¶ Parameters: pIInputChannel (ORSModel.ors.Channel) –
-
setChannelIm2(self, pIInputChannel: ORSModel.ors.Channel) → None¶ Parameters: pIInputChannel (ORSModel.ors.Channel) –
-
setFactorRegularizationSpeedCorrection(self, value: float) → None¶ Parameters: value (float) –
-
setLevelsGaussianPyramid(self, minLevel: int, maxLevel: int) → None¶ Parameters: - minLevel (int) –
- maxLevel (int) –
-
setMaximalConditionValueRegularizedAtransposeA(self, value: float) → None¶ Parameters: value (float) –
-
setOriginPixelsAverageSpeedIm1(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
setOriginPixelsIm1(self, x: int, y: int, z: int, t: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
- t (int) –
-
setOriginPixelsIm2(self, x: int, y: int, z: int, t: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
- t (int) –
-
setPatchWindowHalfsize(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
setPerformZReduction(self, bValue: bool) → None¶ Parameters: bValue (bool) –
-
setSizeImagesPixels(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
setSizePixelsAverageSpeed(self, x: int, y: int, z: int) → None¶ Parameters: - x (int) –
- y (int) –
- z (int) –
-
setUpsampleSpeedToSameSizeAsBaseChannel(self, bValue: bool) → None¶ Parameters: bValue (bool) –
-
setUseBrightnessCorrectionFactors(self, bValueLinearFactor: bool, bValueConstantFactor: bool) → None¶ Parameters: - bValueLinearFactor (bool) –
- bValueConstantFactor (bool) –
-
setUseRotationAroundZ(self, bValue: bool) → None¶ Parameters: bValue (bool) –
-
setUseTranslationX(self, bValue: bool) → None¶ Parameters: bValue (bool) –
-
setUseTranslationY(self, bValue: bool) → None¶ Parameters: bValue (bool) –
-
OrderedCollection¶
-
class
ORSModel.ors.OrderedCollection¶ Bases:
ORSModel.ors.SequenceableCollectionbrief_description: Abstraction class for ordered collections. author: Normand Mongeau. version: 1.0 Abstraction class for ordered collections. OCs keep the items added in their natural order, i.e. the order they were added in. OCs grow dynamically.
-
addAll(self, aSequenceableCollection: ORSModel.ors.SequenceableCollection) → None¶ Parameters: aSequenceableCollection (ORSModel.ors.SequenceableCollection) –
-
addAllFirst(self, aSequenceableCollection: ORSModel.ors.SequenceableCollection) → None¶ Parameters: aSequenceableCollection (ORSModel.ors.SequenceableCollection) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ OrderedCollection.__init__() -> OrderedCollection
-
OrderedCollectionChar¶
-
class
ORSModel.ors.OrderedCollectionChar¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: int) → None¶ Parameters: pValue (int) –
-
addBeforeIndex(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
addFirst(self, pValue: int) → None¶ Parameters: pValue (int) –
-
at(self, index: int) → int¶ Parameters: index (int) – Returns: output (int) –
-
atPut(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → int¶ Returns: output (int) –
-
getLast(self) → int¶ Returns: output (int) –
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
none()¶ OrderedCollectionChar.__init__() -> OrderedCollectionChar
-
removeAllOccurrencesOf(self, pValue: int) → None¶ Parameters: pValue (int) –
-
OrderedCollectionDouble¶
-
class
ORSModel.ors.OrderedCollectionDouble¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: float) → None¶ Parameters: pValue (float) –
-
addBeforeIndex(self, index: int, pValue: float) → None¶ Parameters: - index (int) –
- pValue (float) –
-
addFirst(self, pValue: float) → None¶ Parameters: pValue (float) –
-
at(self, index: int) → float¶ Parameters: index (int) – Returns: output (float) –
-
atPut(self, index: int, pValue: float) → None¶ Parameters: - index (int) –
- pValue (float) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → float¶ Returns: output (float) –
-
getLast(self) → float¶ Returns: output (float) –
-
getOccurrencesOf(self, pValue: float) → int¶ Parameters: pValue (float) – Returns: output (int) –
-
insertAt(self, index: int, pValue: float) → None¶ Parameters: - index (int) –
- pValue (float) –
-
none()¶ OrderedCollectionDouble.__init__() -> OrderedCollectionDouble
-
removeAllOccurrencesOf(self, pValue: float) → None¶ Parameters: pValue (float) –
-
OrderedCollectionFloat¶
-
class
ORSModel.ors.OrderedCollectionFloat¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: float) → None¶ Parameters: pValue (float) –
-
addBeforeIndex(self, index: int, pValue: float) → None¶ Parameters: - index (int) –
- pValue (float) –
-
addFirst(self, pValue: float) → None¶ Parameters: pValue (float) –
-
at(self, index: int) → float¶ Parameters: index (int) – Returns: output (float) –
-
atPut(self, index: int, pValue: float) → None¶ Parameters: - index (int) –
- pValue (float) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → float¶ Returns: output (float) –
-
getLast(self) → float¶ Returns: output (float) –
-
getOccurrencesOf(self, pValue: float) → int¶ Parameters: pValue (float) – Returns: output (int) –
-
insertAt(self, index: int, pValue: float) → None¶ Parameters: - index (int) –
- pValue (float) –
-
none()¶ OrderedCollectionFloat.__init__() -> OrderedCollectionFloat
-
removeAllOccurrencesOf(self, pValue: float) → None¶ Parameters: pValue (float) –
-
OrderedCollectionLONGLONG¶
-
class
ORSModel.ors.OrderedCollectionLONGLONG¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: int) → None¶ Parameters: pValue (int) –
-
addBeforeIndex(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
addFirst(self, pValue: int) → None¶ Parameters: pValue (int) –
-
at(self, index: int) → int¶ Parameters: index (int) – Returns: output (int) –
-
atPut(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → int¶ Returns: output (int) –
-
getLast(self) → int¶ Returns: output (int) –
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
none()¶ OrderedCollectionLONGLONG.__init__() -> OrderedCollectionLONGLONG
-
removeAllOccurrencesOf(self, pValue: int) → None¶ Parameters: pValue (int) –
-
OrderedCollectionLong¶
-
class
ORSModel.ors.OrderedCollectionLong¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: int) → None¶ Parameters: pValue (int) –
-
addBeforeIndex(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
addFirst(self, pValue: int) → None¶ Parameters: pValue (int) –
-
at(self, index: int) → int¶ Parameters: index (int) – Returns: output (int) –
-
atPut(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → int¶ Returns: output (int) –
-
getLast(self) → int¶ Returns: output (int) –
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
none()¶ OrderedCollectionLong.__init__() -> OrderedCollectionLong
-
removeAllOccurrencesOf(self, pValue: int) → None¶ Parameters: pValue (int) –
-
OrderedCollectionShort¶
-
class
ORSModel.ors.OrderedCollectionShort¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: int) → None¶ Parameters: pValue (int) –
-
addBeforeIndex(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
addFirst(self, pValue: int) → None¶ Parameters: pValue (int) –
-
at(self, index: int) → int¶ Parameters: index (int) – Returns: output (int) –
-
atPut(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → int¶ Returns: output (int) –
-
getLast(self) → int¶ Returns: output (int) –
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
none()¶ OrderedCollectionShort.__init__() -> OrderedCollectionShort
-
removeAllOccurrencesOf(self, pValue: int) → None¶ Parameters: pValue (int) –
-
OrderedCollectionUnsignedChar¶
-
class
ORSModel.ors.OrderedCollectionUnsignedChar¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: int) → None¶ Parameters: pValue (int) –
-
addBeforeIndex(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
addFirst(self, pValue: int) → None¶ Parameters: pValue (int) –
-
at(self, index: int) → int¶ Parameters: index (int) – Returns: output (int) –
-
atPut(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → int¶ Returns: output (int) –
-
getLast(self) → int¶ Returns: output (int) –
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
none()¶ OrderedCollectionUnsignedChar.__init__() -> OrderedCollectionUnsignedChar
-
removeAllOccurrencesOf(self, pValue: int) → None¶ Parameters: pValue (int) –
-
OrderedCollectionUnsignedLONGLONG¶
-
class
ORSModel.ors.OrderedCollectionUnsignedLONGLONG¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: int) → None¶ Parameters: pValue (int) –
-
addBeforeIndex(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
addFirst(self, pValue: int) → None¶ Parameters: pValue (int) –
-
at(self, index: int) → int¶ Parameters: index (int) – Returns: output (int) –
-
atPut(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → int¶ Returns: output (int) –
-
getLast(self) → int¶ Returns: output (int) –
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
none()¶ OrderedCollectionUnsignedLONGLONG.__init__() -> OrderedCollectionUnsignedLONGLONG
-
removeAllOccurrencesOf(self, pValue: int) → None¶ Parameters: pValue (int) –
-
OrderedCollectionUnsignedLong¶
-
class
ORSModel.ors.OrderedCollectionUnsignedLong¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: int) → None¶ Parameters: pValue (int) –
-
addBeforeIndex(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
addFirst(self, pValue: int) → None¶ Parameters: pValue (int) –
-
at(self, index: int) → int¶ Parameters: index (int) – Returns: output (int) –
-
atPut(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → int¶ Returns: output (int) –
-
getLast(self) → int¶ Returns: output (int) –
-
getOccurrencesOf(self, pValue: int) → int¶ Parameters: pValue (int) – Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
none()¶ OrderedCollectionUnsignedLong.__init__() -> OrderedCollectionUnsignedLong
-
removeAllOccurrencesOf(self, pValue: int) → None¶ Parameters: pValue (int) –
-
OrderedCollectionUnsignedShort¶
-
class
ORSModel.ors.OrderedCollectionUnsignedShort¶ Bases:
ORSModel.ors.OrderedCollection-
add(self, pValue: int) → None¶ Parameters: pValue (int) –
-
addBeforeIndex(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
addFirst(self, pValue: int) → None¶ Parameters: pValue (int) –
-
at(self, index: int) → int¶ Parameters: index (int) – Returns: output (int) –
-
atPut(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFirst(self) → int¶ Returns: output (int) –
-
getLast(self) → int¶ Returns: output (int) –
-
insertAt(self, index: int, pValue: int) → None¶ Parameters: - index (int) –
- pValue (int) –
-
none()¶ OrderedCollectionUnsignedShort.__init__() -> OrderedCollectionUnsignedShort
-
removeAllOccurrencesOf(self, pValue: int) → None¶ Parameters: pValue (int) –
-
OrientedPlane¶
-
class
ORSModel.ors.OrientedPlane¶ Bases:
ORSModel.ors.Shape2Dbrief_description: Oriented plane manipulation services. author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: May 2010
-
copy(self) → OrientedPlane¶ Gets a copy of the receiver.
Returns: output (ORSModel.ors.OrientedPlane) – an oriented plane (an OrientedPlane)
-
createFromPythonRepresentation(aPythonRepresentation: str) → OrientedPlane¶ Create aUnmanaged Object from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.OrientedPlane) –
-
from3PointsAndUp(self, point0: ORSModel.ors.Vector3, point1: ORSModel.ors.Vector3, point2: ORSModel.ors.Vector3, up: ORSModel.ors.Vector3) → None¶ Initializes the plane from 3 points and an up vector.
Note
The up vector must be perpendicular to the normal vector.
Parameters: - point0 (ORSModel.ors.Vector3) – The first point (an Vector3)
- point1 (ORSModel.ors.Vector3) – The second point (an Vector3)
- point2 (ORSModel.ors.Vector3) – The third point (an Vector3)
- up (ORSModel.ors.Vector3) – The up vector (an Vector3)
-
fromPointAndNormalAndUp(self, point: ORSModel.ors.Vector3, normal: ORSModel.ors.Vector3, up: ORSModel.ors.Vector3) → None¶ Initializes the receiver from an origin point, a normal vector and an up vector.
Note
The up vector must be perpendicular to the normal vector.
Parameters: - point (ORSModel.ors.Vector3) – The point of origin (an Vector3)
- normal (ORSModel.ors.Vector3) – The normal vector (an Vector3)
- up (ORSModel.ors.Vector3) – The up vector (an Vector3)
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getA(self) → float¶ Gets the A plane value.
Returns: output (float) – the A value (a double)
-
getB(self) → float¶ Gets the B plane value.
Returns: output (float) – the B value (a double)
-
getC(self) → float¶ Gets the C plane value.
Returns: output (float) – the C value (a double)
-
getCenter(self) → Vector3¶ Gets the center position.
Returns: output (ORSModel.ors.Vector3) – the center position (an Vector3)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getD(self) → float¶ Gets the D plane value.
Returns: output (float) – the D value (a double)
-
getDirection0(self) → Vector3¶ Gets the orientedPlane right direction.
Note
The direction0 vector is normalized.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirection1(self) → Vector3¶ Gets the orientedPlane up direction.
Note
The direction0 vector is normalized.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirection2(self) → Vector3¶ Gets the orientedPlane normal direction.
Note
The direction0 vector is normalized.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDistanceFromOrientedPlane(self, orientedPlane: ORSModel.ors.OrientedPlane) → float¶ Gets the distance from the provided plane to the receiver.
Parameters: orientedPlane (ORSModel.ors.OrientedPlane) – Returns: output (float) – a distance (a double)
-
getDistanceFromPlane(self, plane: ORSModel.ors.Plane) → float¶ Returns the distance from the receiver to the provided plane.
Note
Returns 0 if the receiver is parallel with the provided plane.
Parameters: plane (ORSModel.ors.Plane) – the plane (an Plane) Returns: output (float) – a distance (a double)
-
getDistanceFromPoint(self, point: ORSModel.ors.Vector3) → float¶ Returns the distance from the receiver to the provided point.
Parameters: point (ORSModel.ors.Vector3) – the point (an Vector3) Returns: output (float) – a distance (a double)
-
getEulerAngles(self, yaw: float, pitch: float, roll: float) → None¶ Returns the yaw, pitch, roll of the plane.
Returns: - yaw (float) – yaw (a double)
- pitch (float) – pitch (a double)
- roll (float) – roll (a double)
-
getIntersectionWithLine(self, aLine: ORSModel.ors.Line) → Vector3¶ Returns the vector representing the intersection with the provided line.
Parameters: aLine (ORSModel.ors.Line) – Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3) or NULL if no intersection
-
getIntersectionWithLineSegment(self, aLineSegment: ORSModel.ors.LineSegment) → Vector3¶ Returns the vector representing the intersection with the provided line segment.
Parameters: aLineSegment (ORSModel.ors.LineSegment) – Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3) or NULL if no intersection
-
getIntersectionWithPlanes(self, plane1: ORSModel.ors.Plane, plane2: ORSModel.ors.Plane) → Vector3¶ Returns the point of the intersection with the provided planes.
Parameters: - plane1 (ORSModel.ors.Plane) –
- plane2 (ORSModel.ors.Plane) –
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3) or NULL if no intersection
-
getIsEqualTo(self, anOrientedPlane: ORSModel.ors.OrientedPlane) → bool¶ Parameters: anOrientedPlane (ORSModel.ors.OrientedPlane) – Returns: output (bool) –
-
getIsParallelWithOrientedPlane(self, orientedPlane: ORSModel.ors.OrientedPlane) → bool¶ Checks if the receiver is parallel with the provided oriented plane.
Parameters: orientedPlane (ORSModel.ors.OrientedPlane) – Returns: output (bool) – TRUE if parallel, FALSE otherwise
-
getIsParallelWithPlane(self, plane: ORSModel.ors.Plane) → bool¶ Checks if the receiver is parallel with the provided plane.
Parameters: plane (ORSModel.ors.Plane) – the plane (an Plane) Returns: output (bool) – TRUE if parallel, FALSE otherwise
-
getNormal(self) → Vector3¶ Returns the normal of the plane.
Returns: output (ORSModel.ors.Vector3) – A vector (an Vector3)
-
getPlane(self) → Plane¶ Gets the plane represented by the receiver.
Returns: output (ORSModel.ors.Plane) – a plane (an Plane)
-
getPointOnOrientedPlaneClosestToOrigin(self) → Vector3¶ Returns the point on the receiver that is closest to the origin (0, 0, 0)
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getProjectionOnPlane(self, point: ORSModel.ors.Vector3) → Vector3¶ Returns the point provided projected on the receiver.
Parameters: point (ORSModel.ors.Vector3) – the point (an Vector3) Returns: output (ORSModel.ors.Vector3) – the projected point (an Vector3)
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getRight(self) → Vector3¶ Gets the cross product of the normal and up vectors.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getRotated(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → OrientedPlane¶ Parameters: - axisOfRotation (ORSModel.ors.Vector3) –
- rotationCenter (ORSModel.ors.Vector3) –
- angle (float) –
Returns: output (ORSModel.ors.OrientedPlane) –
-
getTransformed(self, aTransformationMatrix: ORSModel.ors.Matrix4x4) → OrientedPlane¶ Parameters: aTransformationMatrix (ORSModel.ors.Matrix4x4) – Returns: output (ORSModel.ors.OrientedPlane) –
-
getTranslatedToIncludePoint(self, point: ORSModel.ors.Vector3) → OrientedPlane¶ Parameters: point (ORSModel.ors.Vector3) – Returns: output (ORSModel.ors.OrientedPlane) –
-
getUp(self) → Vector3¶ Gets the up vector.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
none()¶ OrientedPlane.__init__() -> OrientedPlane
-
rotate(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → None¶ Applies a rotation to the receiver.
Note
The box is a right handed bounded referential.
Parameters: - axisInWorld (ORSModel.ors.Vector3) – a rotation axis (an Vector3)
- aroundPointInWorld (ORSModel.ors.Vector3) – a center of rotation (an Vector3)
- angleInRadian (float) – an angle in radian (a double)
-
setA(self, a: float) → None¶ Sets the A plane value.
Parameters: a (float) – the A value (a double)
-
setB(self, b: float) → None¶ Sets the B plane value.
Parameters: b (float) – the B value (a double)
-
setC(self, c: float) → None¶ Sets the C plane value.
Parameters: c (float) – the C value (a double)
-
setCenter(self, pCenterVector: ORSModel.ors.Vector3) → None¶ Sets the center position.
Parameters: pCenterVector (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setD(self, d: float) → None¶ Sets the D plane value.
Parameters: d (float) – the D value (a double)
-
setOrientedPlaneValue(self, a: float, b: float, c: float, d: float, upX: float, upY: float, upZ: float, centerX: float, centerY: float, centerZ: float) → None¶ Sets all the receiver value components.
Parameters: - a (float) – the A parameter (a double)
- b (float) – the B parameter (a double)
- c (float) – the C parameter (a double)
- d (float) – the D parameter (a double)
- upX (float) – the up X component (a double)
- upY (float) – the up Y component (a double)
- upZ (float) – the up Z component (a double)
- centerX (float) – the center position X component (a double)
- centerY (float) – the center position Y component (a double)
- centerZ (float) – the center position Z component (a double)
-
setUp(self, upVector: ORSModel.ors.Vector3) → None¶ Sets the up vector.
Parameters: upVector (ORSModel.ors.Vector3) – a vector (an Vector3)
-
translateToIncludePoint(self, point: ORSModel.ors.Vector3) → None¶ Parameters: point (ORSModel.ors.Vector3) –
-
PartialSpaceDijkstra¶
-
class
ORSModel.ors.PartialSpaceDijkstra¶ Bases:
ORSModel.ors.Dijkstra-
extractBoundaryFromROI(self, aVolROI: ORSModel.ors.ROI) → None¶ Parameters: aVolROI (ORSModel.ors.ROI) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ PartialSpaceDijkstra.__init__() -> PartialSpaceDijkstra
-
setRadiusOfInterest(self, radius: int) → None¶ Parameters: radius (int) –
-
PartialSpaceFastMarching¶
-
class
ORSModel.ors.PartialSpaceFastMarching¶ Bases:
ORSModel.ors.FastMarching-
extractBoundaryFromROI(self, aVolROI: ORSModel.ors.ROI) → None¶ Parameters: aVolROI (ORSModel.ors.ROI) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ PartialSpaceFastMarching.__init__() -> PartialSpaceFastMarching
-
setRadiusOfInterest(self, radius: int) → None¶ Parameters: radius (int) –
-
PerimeterComputation¶
-
class
ORSModel.ors.PerimeterComputation¶ Bases:
ORSModel.ors.Unmanaged-
computeTotalPerimeterFromOneSliceDataArray(self, sliceData: ORSModel.ors.ArrayUnsignedChar, iSizeX: int, iSizeY: int, dSpacingX: float, dSpacingY: float, occupiedvalue: int) → float¶ Parameters: - sliceData (ArrayUnsignedChar) –
- iSizeX (int) –
- iSizeY (int) –
- dSpacingX (float) –
- dSpacingY (float) –
- occupiedvalue (int) –
Returns: output (float) –
-
computeTotalROIPerimeterOnAPlane(self, plane: ORSModel.ors.Plane, iTIndex: int) → float¶ Parameters: - plane (Plane) –
- iTIndex (int) –
Returns: output (float) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
Plane¶
-
class
ORSModel.ors.Plane¶ Bases:
ORSModel.ors.Shape2Dbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2010
-
copy(self) → Plane¶ Copies a plane.
Note
The copied plane has the same equation as the source plane.
Returns: output (ORSModel.ors.Plane) – A new plane (an Plane)
-
createFromPythonRepresentation(aPythonRepresentation: str) → Plane¶ Create aPlane from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Plane) –
-
from3Points(self, point0: ORSModel.ors.Vector3, point1: ORSModel.ors.Vector3, point2: ORSModel.ors.Vector3) → None¶ Initializes the plane from 3 points.
Parameters: - point0 (ORSModel.ors.Vector3) – The first point (an Vector3)
- point1 (ORSModel.ors.Vector3) – The second point (an Vector3)
- point2 (ORSModel.ors.Vector3) – The third point (an Vector3)
-
fromNPointsLeastMeanSquares(self, aPointCollection: ORSModel.ors.SequenceableCollection) → None¶ Gets the plane minimizing the sum of the squares distances from a set of (at least 3) points.
Parameters: aPointCollection (ORSModel.ors.SequenceableCollection) – A sequence of points coordinates.
-
fromPointAndNormal(self, point: ORSModel.ors.Vector3, normal: ORSModel.ors.Vector3) → None¶ Initializes the plane from an origin point and a normal vector.
Parameters: - point (ORSModel.ors.Vector3) – The point of origin (an Vector3)
- normal (ORSModel.ors.Vector3) – The normal vector (an Vector3)
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ set aPlane from a python representation
Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getA(self) → float¶ Gets the a coefficient of the plane.
Note
The general plane equation is ax + by + cz + dw = 0.
Returns: output (float) – The a coefficient of the plane (a double)
-
getB(self) → float¶ Gets the b coefficient of the plane.
Note
The general plane equation is ax + by + cz + dw = 0.
Returns: output (float) – The b coefficient of the plane (a double)
-
getC(self) → float¶ Gets the c coefficient of the plane.
Note
The general plane equation is ax + by + cz + dw = 0.
Returns: output (float) – The c coefficient of the plane (a double)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getD(self) → float¶ Gets the d coefficient of the plane.
Note
The general plane equation is ax + by + cz + dw = 0.
Returns: output (float) – The d coefficient of the plane (a double)
-
getDistanceFromPlane(self, plane: ORSModel.ors.Plane) → float¶ Computes the distance from another plane.
Parameters: plane (ORSModel.ors.Plane) – A plane (an Plane) Returns: output (float) – the distance (a double)
-
getDistanceFromPoint(self, point: ORSModel.ors.Vector3) → float¶ Computes the distance from a point.
Parameters: point (ORSModel.ors.Vector3) – A point (an Vector3) Returns: output (float) – the distance (a double)
-
getIntersectionWithLine(self, aLine: ORSModel.ors.Line) → Vector3¶ Return the vector representing the intersection of the provided line and the receiver.
Parameters: aLine (ORSModel.ors.Line) – Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3) or NULL if not intersection
-
getIntersectionWithLineSegment(self, aLineSegment: ORSModel.ors.LineSegment) → Vector3¶ Return the vector representing the intersection of the provided line segment and the receiver.
Parameters: aLineSegment (ORSModel.ors.LineSegment) – Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3) or NULL if not intersection
-
getIntersectionWithPlane(self, plane: ORSModel.ors.Plane) → Line¶ Parameters: plane (ORSModel.ors.Plane) – Returns: output (ORSModel.ors.Line) –
-
getIntersectionWithPlanes(self, plane1: ORSModel.ors.Plane, plane2: ORSModel.ors.Plane) → Vector3¶ Return the point of the intersection of the provided planes and the receiver.
Parameters: - plane1 (ORSModel.ors.Plane) –
- plane2 (ORSModel.ors.Plane) –
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3) or NULL if not intersection
-
getIsEqualTo(self, plane: ORSModel.ors.Plane) → bool¶ Verifies equality between the receiver and a given plane.
Parameters: plane (ORSModel.ors.Plane) – Returns: output (bool) – TRUE if the argument plane is equal to the receiver, FALSE otherwise
-
getIsParallelWithPlane(self, plane: ORSModel.ors.Plane) → bool¶ Checks to see if a given plane is parallel to the received plane.
Parameters: plane (ORSModel.ors.Plane) – A plane (an Plnae) Returns: output (bool) – TRUE if both planes are parallel, FALSE otherwise
-
getNormal(self) → Vector3¶ Returns the normal of the plane.
Returns: output (ORSModel.ors.Vector3) – A vector (an Vector3)
-
getPointOnPlaneClosestToOrigin(self) → Vector3¶ Returns the closest point to the origin of the plane.
Returns: output (ORSModel.ors.Vector3) – A point (an Vector3)
-
getProjectionOnPlane(self, point: ORSModel.ors.Vector3) → Vector3¶ Parameters: point (ORSModel.ors.Vector3) – Returns: output (ORSModel.ors.Vector3) –
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getRotated(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → Plane¶ Parameters: - axisOfRotation (ORSModel.ors.Vector3) –
- rotationCenter (ORSModel.ors.Vector3) –
- angle (float) –
Returns: output (ORSModel.ors.Plane) –
-
getTranslatedToIncludePoint(self, point: ORSModel.ors.Vector3) → Plane¶ Parameters: point (ORSModel.ors.Vector3) – Returns: output (ORSModel.ors.Plane) –
-
none()¶ Plane.__init__() -> Plane
-
rotate(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → None¶ Applies a rotation to the receiver.
Note
The box is a right handed bounded referential.
Parameters: - axisInWorld (ORSModel.ors.Vector3) – a rotation axis (an Vector3)
- aroundPointInWorld (ORSModel.ors.Vector3) – a center of rotation (an Vector3)
- angleInRadian (float) – an angle in radian (a double)
-
setA(self, a: float) → None¶ Sets the a coefficient of the plane.
Note
The general plane equation is ax + by + cz + dw = 0.
Parameters: a (float) – The a coefficient of the plane (a double)
-
setB(self, b: float) → None¶ Sets the b coefficient of the plane.
Note
The general plane equation is ax + by + cz + dw = 0.
Parameters: b (float) – The b coefficient of the plane (a double)
-
setC(self, c: float) → None¶ Sets the c coefficient of the plane.
Note
The general plane equation is ax + by + cz + dw = 0.
Parameters: c (float) – The c coefficient of the plane (a double)
-
setD(self, d: float) → None¶ Sets the d coefficient of the plane.
Note
The general plane equation is ax + by + cz + dw = 0.
Parameters: d (float) – The d coefficient of the plane (a double)
-
translateToIncludePoint(self, point: ORSModel.ors.Vector3) → None¶ Parameters: point (ORSModel.ors.Vector3) –
-
PlaneCollection¶
-
class
ORSModel.ors.PlaneCollection¶ Bases:
ORSModel.ors.Visualbrief_description: Represents a collection of planes in the view. author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: Mai 2015 Represents a collection of planes in the view.
-
addPlane(self, aPlane: ORSModel.ors.Plane, tIndex: int) → None¶ Parameters: - aPlane (ORSModel.ors.Plane) –
- tIndex (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getHighlightedPlaneCollection(self, tIndex: int) → OrderedCollectionUnsignedChar¶ Parameters: tIndex (int) – Returns: output (ORSModel.ors.OrderedCollectionUnsignedChar) –
-
getHighlightedPlaneCount(self, tIndex: int) → int¶ Parameters: tIndex (int) – Returns: output (int) –
-
getPlane(self, planeIndex: int, tIndex: int) → Plane¶ Parameters: - planeIndex (int) –
- tIndex (int) –
Returns: output (ORSModel.ors.Plane) –
-
getPlaneCount(self, tIndex: int) → int¶ Parameters: tIndex (int) – Returns: output (int) –
-
getSelectedColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getSelectedPlaneCollection(self, tIndex: int) → OrderedCollectionUnsignedChar¶ Parameters: tIndex (int) – Returns: output (ORSModel.ors.OrderedCollectionUnsignedChar) –
-
getSelectedPlaneCount(self, tIndex: int) → int¶ Parameters: tIndex (int) – Returns: output (int) –
-
getThicknessIn2DView(self) → int¶ Returns: output (int) –
-
none()¶ PlaneCollection.__init__() -> PlaneCollection
-
removePlane(self, planeIndex: int, tIndex: int) → None¶ Parameters: - planeIndex (int) –
- tIndex (int) –
-
setColor(self, color: ORSModel.ors.Color) → None¶ Parameters: color (ORSModel.ors.Color) –
-
setPlane(self, aPlane: ORSModel.ors.Plane, planeIndex: int, tIndex: int) → None¶ Parameters: - aPlane (ORSModel.ors.Plane) –
- planeIndex (int) –
- tIndex (int) –
-
setSelectedColor(self, color: ORSModel.ors.Color) → None¶ Parameters: color (ORSModel.ors.Color) –
-
setThicknessIn2DView(self, tickness: int) → None¶ Parameters: tickness (int) –
-
Progress¶
-
class
ORSModel.ors.Progress¶ Bases:
ORSModel.ors.Managedbrief_description: An entity to control progress of lengthy processes. author: Normand All other members of ORS participated. version: 1.0 date: August 2014 An entity describing a progress controller.
-
closeProgress(self) → None¶ Closes the progress bar.
Note
This protocol is also called automatically when the interface gets deleted, so it is not necessary to call it.
-
decrementRangeBy(self, iVal: int) → None¶ Decrements the progress range.
Note
This protocol is only relevant when the progress is not a working progress.
Parameters: iVal (int) –
-
deleteObject(self) → None¶ Explicitly deletes the core object wrapped by this Interface object.
-
getCaption(self) → str¶ Gets the caption.
Returns: output (str) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCurrentProgress(self) → int¶ Gets the current progress position.
Note
This protocol should not be used with working progress bars, as they do not have a position.
Returns: output (int) – the current progress bar position (an uint32_t)
-
getExtraText(self) → str¶ Gets the extra text.
Returns: output (str) –
-
getID(self) → int¶ Gets the ID.
Note
This protocol is only relevant when the progress is started from an ID, not from a string caption.
Returns: output (int) – the progress ID (an short)
-
getIsCancellable(self) → bool¶ Gets if the progress is cancellable.
Returns: output (bool) – true if progress is cancellable, false otherwise
-
getIsCancelled(self) → bool¶ Checks if the progress was cancelled by the user.
Note
This protocol is only relevant when the progress is a cancellable progress.
Returns: output (bool) – true if progress was cancelled, false otherwise
-
getIsVisible(self) → bool¶ Gets if the progress is visible.
Returns: output (bool) – true if progress is visible, false otherwise
-
getIsWorkingBar(self) → bool¶ Gets if the progress is a working progress or not.
Returns: output (bool) – true if progress is a working progress, false otherwise
-
getRange(self) → int¶ Gets the progress range.
Note
This protocol is only relevant when the progress is not a working progress.
Returns: output (int) – the range (an uint32_t)
-
incrementRangeBy(self, iVal: int) → None¶ Increments the progress range.
Note
This protocol is only relevant when the progress is not a working progress.
Parameters: iVal (int) –
-
none()¶ Progress.__init__() -> Progress
-
resetCancelledState(self) → None¶ Resets the cancelled state.
-
setCancelButtonText(self, sText: str) → None¶ Sets the text of the cancel button.
Parameters: sText (str) –
-
setExtraText(self, text: str) → None¶ Sets the extra text.
Note
The extra text is displayed in the progress dialog.
Parameters: text (str) – some text (a string)
-
setIsCancellable(self, pValue: bool) → None¶ Sets if the progress is cancellable.
Parameters: pValue (bool) – true to make the progress cancellable, false otherwise
-
setIsCancelled(self, pValue: bool) → None¶ Sets the progress to be cancelled or not.
Note
This protocol is only relevant when the progress is a cancellable progress.
Parameters: pValue (bool) – true to cancel, false otherwise
-
setIsVisible(self, bVisible: bool) → None¶ Sets if the progress is visible.
Parameters: bVisible (bool) –
-
startProgressWithCaption(self, sCaption: str, iRange: int, bCancellable: bool) → None¶ Starts a normal progress bar.
Parameters: - sCaption (str) – the progress caption (a string)
- iRange (int) – the range (an uint32_t)
- bCancellable (bool) – true if the progress bar is to be cancellable, false otherwise
-
startProgressWithID(self, iID: int, iRange: int, bCancellable: bool) → None¶ Starts a normal progress bar.
Parameters: - iID (int) – the progress id (an unsigned short, see ORSProgressBars.h for supported IDs)
- iRange (int) – the range (an uint32_t)
- bCancellable (bool) – true if the progress bar is to be cancellable, false otherwise
-
startWorkingProgressWithCaption(self, sCaption: str, bCancellable: bool) → None¶ Starts a working progress bar.
Parameters: - sCaption (str) – the progress caption (a string)
- bCancellable (bool) – true if the working bar is to be cancellable, false otherwise
-
startWorkingProgressWithID(self, iID: int, bCancellable: bool) → None¶ Starts a working progress bar.
Parameters: - iID (int) – the progress id (an unsigned short, see ORSProgressBars.h for supported IDs)
- bCancellable (bool) – true if the working bar is to be cancellable, false otherwise
-
updateProgress(self, iPosition: int) → None¶ Updates the progress bar.
Note
This protocol should not be used with working progress bars, as they do not have a position.
Parameters: iPosition (int) – the new progress bar position (an uint32_t)
-
Quaternion¶
-
class
ORSModel.ors.Quaternion¶ Bases:
ORSModel.ors.Unmanagedbrief_description: A wrapper to a 3D vector. author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: august 2018
-
add(self, aVector: ORSModel.ors.Quaternion) → None¶ Adds a vector to the receiver.
Parameters: aVector (ORSModel.ors.Quaternion) – a vector (an Vector3)
-
copy(self) → Quaternion¶ Returns a new vector identical to the receiver (a copy).
Returns: output (ORSModel.ors.Quaternion) –
-
createFromPythonRepresentation(aPythonRepresentation: str) → Quaternion¶ Create aUnmanaged Object from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Quaternion) –
-
fromAxisAndAngle(self, axis: ORSModel.ors.Vector3, angle: float) → None¶ Parameters: - axis (ORSModel.ors.Vector3) –
- angle (float) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
fromRotationMatrix(self, aRotationMatrix: ORSModel.ors.Matrix4x4) → None¶ Parameters: aRotationMatrix (ORSModel.ors.Matrix4x4) –
-
getAdditionWith(self, aVector: ORSModel.ors.Quaternion) → Quaternion¶ Gets the result of adding a vector to the receiver.
Note
The receiver is not modified.
Parameters: aVector (ORSModel.ors.Quaternion) – a vector (an Vector3) Returns: output (ORSModel.ors.Quaternion) – the resulting vector (an Vector3)
-
getAngle(self) → float¶ Returns: output (float) –
-
getAsRotationMatrix(self) → Matrix4x4¶ Returns: output (ORSModel.ors.Matrix4x4) –
-
getAxis(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getConjugate(self) → Quaternion¶ Returns: output (ORSModel.ors.Quaternion) –
-
getDirection(self) → Vector3¶ get direction of theQuaternion
Returns: output (ORSModel.ors.Vector3) – Vector3
-
getDotProductWith(self, aQuaternion: ORSModel.ors.Quaternion) → float¶ Parameters: aQuaternion (ORSModel.ors.Quaternion) – Returns: output (float) –
-
getIsEqualTo(self, aVector: ORSModel.ors.Quaternion) → bool¶ Parameters: aVector (ORSModel.ors.Quaternion) – Returns: output (bool) –
-
getLength(self) → float¶ Gets the vector’s length.
Returns: output (float) – the length (a double)
-
getLinearInterpolationWith(self, point1: ORSModel.ors.Quaternion, normalizePosition: float) → Quaternion¶ Computes the lerp with another vector.
Parameters: - point1 (ORSModel.ors.Quaternion) – a vector (an Vector3)
- normalizePosition (float) – a interpolation factor [0,1](a double)
Returns: output (ORSModel.ors.Quaternion) – the lerp vector (an Vector3)
-
getMultiply(self, aQuaternion: ORSModel.ors.Quaternion) → Quaternion¶ multyply the receiver with the givenQuaternion.
Parameters: aQuaternion (ORSModel.ors.Quaternion) – a double value Returns: output (ORSModel.ors.Quaternion) –
-
getNegated(self) → Quaternion¶ Gets the receiver negated in a new vector.
Note
The receiver is not modified.
Returns: output (ORSModel.ors.Quaternion) – the resulting vector (an Vector3)
-
getNormalized(self) → Quaternion¶ Returns: output (ORSModel.ors.Quaternion) –
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getScaledBy(self, scaleFactor: float) → Quaternion¶ Gets the result of sacling a vector to the receiver.
Note
The receiver is not modified.
Parameters: scaleFactor (float) – a scale a double Returns: output (ORSModel.ors.Quaternion) – the resulting vector (an Vector3)
-
getSphericalInterpolationWith(self, point1: ORSModel.ors.Quaternion, normalizePosition: float) → Quaternion¶ Computes the slerp with another vector.
Parameters: - point1 (ORSModel.ors.Quaternion) – a vector (an Vector3)
- normalizePosition (float) – a interpolation factor [0,1](a double)
Returns: output (ORSModel.ors.Quaternion) – the lerp vector (an Vector3)
-
getSubtractionFrom(self, aVector: ORSModel.ors.Quaternion) → Quaternion¶ Gets the result of subtracting a vector from the receiver.
Note
The receiver is not modified.
Parameters: aVector (ORSModel.ors.Quaternion) – a vector (an Vector3) Returns: output (ORSModel.ors.Quaternion) – the resulting vector (an Vector3)
-
getUp(self) → Vector3¶ get direction of theQuaternion
Returns: output (ORSModel.ors.Vector3) – Vectoupr3
-
getW(self) → float¶ Gets the W value from the vector.
Returns: output (float) – a double
-
getX(self) → float¶ Gets the X value from the vector.
Returns: output (float) – a double
-
getY(self) → float¶ Gets the Y value from the vector.
Returns: output (float) – a double
-
getZ(self) → float¶ Gets the Z value from the vector.
Returns: output (float) – a double
-
multiply(self, aQuaternion: ORSModel.ors.Quaternion) → None¶ multyply the receiver with the givenQuaternion.
Parameters: aQuaternion (ORSModel.ors.Quaternion) – a double value
-
none()¶ Quaternion.__init__() -> Quaternion
-
normalize(self) → None¶ Normalizes the vector.
Note
A normalized vector has norm (length) 1.
-
scale(self, scaleFactor: float) → None¶ Scales the vector.
Parameters: scaleFactor (float) – a scale factor (a double)
-
setW(self, value: float) → None¶ Sets the Y value of the vector.
Parameters: value (float) – a double value
-
setX(self, value: float) → None¶ Sets the X value of the vector.
Parameters: value (float) – a double value
-
setXYZ(self, x: float, y: float, z: float) → None¶ Sets the 3 vector component.
Note
W is set to zero
Parameters: - x (float) – the X component (a double)
- y (float) – the Y component (a double)
- z (float) – the Z component (a double)
-
setY(self, value: float) → None¶ Sets the Y value of the vector.
Parameters: value (float) – a double value
-
setZ(self, value: float) → None¶ Sets the Z value of the vector.
Parameters: value (float) – a double value
-
subtract(self, aVector: ORSModel.ors.Quaternion) → None¶ Subtracts a vector from the receiver.
Parameters: aVector (ORSModel.ors.Quaternion) – a vector (an Vector3)
-
ROI¶
-
class
ORSModel.ors.ROI¶ Bases:
ORSModel.ors.StructuredGridbrief_description: Represents a region of interest for a dataset. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: VisualChannel, MeshFacesROI Represents a VisualRegion of Interest (ROI) for a dataset. Can be used to highlight, subtract, extract, etc, portions of a dataset. Each ROI has its own color, opacity, visual state, etc. Only a limited amount of ROIs (255) can be visible simultaneously.
-
adaptToChannel(self, pChannel: ORSModel.ors.Channel, x: int, y: int, z: int, pTSourceOffset: int, pTRange: int) → None¶ Adapts aROI to a channel, according to the channel’s coordinates.
Note
The supplied X/Y/Z offset is the offset of the given channel relatively to the originating channel (the one the ROI is based upon), in voxels.
Parameters: - pChannel (ORSModel.ors.Channel) – a reference channel (an Channel)
- x (int) – an X offset (an short)
- y (int) – an Y offset (an short)
- z (int) – a Z offset (an short)
- pTSourceOffset (int) – the T start position of the ROI (a uint32_t)
- pTRange (int) – the number of Ts to process (a uint32_t)
-
addCircleArea(self, posX: float, posY: float, posZ: float, normalX: float, normalY: float, normalZ: float, radius: float, tStep: int) → None¶ Add circle area toROI.
Parameters: - posX (float) –
- posY (float) –
- posZ (float) –
- normalX (float) –
- normalY (float) –
- normalZ (float) –
- radius (float) –
- tStep (int) –
-
addCircularPath2D(self, path: ORSModel.ors.VisualPath, box: ORSModel.ors.Box, plane: ORSModel.ors.Plane, includeAllTouchingVoxel: bool, inverse: bool, bRemove: bool, IProgress: ORSModel.ors.Progress, tStep: int) → None¶ Add a 2D polygon from aVisualPath to the ROI.
Parameters: - path (ORSModel.ors.VisualPath) –
- box (ORSModel.ors.Box) –
- plane (ORSModel.ors.Plane) –
- includeAllTouchingVoxel (bool) –
- inverse (bool) –
- bRemove (bool) –
- IProgress (ORSModel.ors.Progress) –
- tStep (int) –
-
addCircularPath3D(self, path: ORSModel.ors.VisualPath, box: ORSModel.ors.Box, plane: ORSModel.ors.Plane, includeAllTouchingVoxel: bool, inverse: bool, bRemove: bool, IProgress: ORSModel.ors.Progress, tStep: int) → None¶ Add a 3D polygon from aVisualPath to the ROI.
Parameters: - path (ORSModel.ors.VisualPath) –
- box (ORSModel.ors.Box) –
- plane (ORSModel.ors.Plane) –
- includeAllTouchingVoxel (bool) –
- inverse (bool) –
- bRemove (bool) –
- IProgress (ORSModel.ors.Progress) –
- tStep (int) –
-
addEllipse2D(self, plane: ORSModel.ors.Rectangle, includeAllTouchingVoxel: bool, inverse: bool, remove: bool, IProgress: ORSModel.ors.Progress, tStep: int) → None¶ Adds a 2D ellipse to theROI.
Parameters: - plane (ORSModel.ors.Rectangle) – the bounded plane on which the ellipse lies (an Rectangle)
- includeAllTouchingVoxel (bool) – true to include all touching voxels, false to only include voxels where center is included
- inverse (bool) – true to add the inverse of the polygon
- remove (bool) – true to remove the polygon, false to add it
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
- tStep (int) – time step for which to add the ellipse (a uint32_t)
-
addEllipse3D(self, plane: ORSModel.ors.Rectangle, includeAllTouchingVoxel: bool, inverse: bool, remove: bool, IProgress: ORSModel.ors.Progress, tStep: int) → None¶ Adds a 2D ellipse to theROI.
Parameters: - plane (ORSModel.ors.Rectangle) – the bounded plane on which the ellipse lies (an Rectangle)
- includeAllTouchingVoxel (bool) – true to include all touching voxels, false to only include voxels where center is included
- inverse (bool) – true to add the inverse of the polygon
- remove (bool) – true to remove the polygon, false to add it
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
- tStep (int) – time step for which to add the ellipse (a uint32_t)
-
addLine(self, pLine: ORSModel.ors.Line, tStep: int) → None¶ Adds a line to theROI.
Note
Note that the range values are inclusive.
Parameters: - pLine (ORSModel.ors.Line) – None
- tStep (int) – step
-
addLineIfInRange(self, pLine: ORSModel.ors.Line, tStep: int, lowerThreshold: float, upperThreshold: float, pChannel: ORSModel.ors.Channel) → None¶ Adds a line to theROI if the corresponding voxels in the channel are within the specified range.
Note
Note that the range values are inclusive.
Parameters: - pLine (ORSModel.ors.Line) – the line to add (an Line)
- tStep (int) – the time step (a uint32_t)
- lowerThreshold (float) – the lower range value (a double)
- upperThreshold (float) – the upper range value (a double)
- pChannel (ORSModel.ors.Channel) – a channel of the same shape as the receiver (an Channel)
-
addLineSegment(self, lineSegment: ORSModel.ors.LineSegment, tStep: int) → None¶ Adds a line segment to theROI.
Parameters: - lineSegment (ORSModel.ors.LineSegment) – the line to remove (an Line)
- tStep (int) – the time step (a uint32_t)
-
addLineSegmentIfInRange(self, lineSegment: ORSModel.ors.LineSegment, tStep: int, lowerThreshold: float, upperThreshold: float, pChannel: ORSModel.ors.Channel) → None¶ Adds a line segment to theROI if the corresponding voxels in the channel are within the specified range.
Note
Note that the range values are inclusive.
Parameters: - lineSegment (ORSModel.ors.LineSegment) – the line segment to add (an LineSegment)
- tStep (int) – the time step (a uint32_t)
- lowerThreshold (float) – the lower range value (a double)
- upperThreshold (float) – the upper range value (a double)
- pChannel (ORSModel.ors.Channel) – a channel of the same shape as the receiver (an Channel)
-
addPathContour(self, aPath: ORSModel.ors.VisualPath, aBox: ORSModel.ors.Box, tStep: int) → None¶ Add aVisualPath contour to the ROI.
Parameters: - aPath (ORSModel.ors.VisualPath) –
- aBox (ORSModel.ors.Box) –
- tStep (int) –
-
addPolygon2D(self, ptsList: float, ptsListSize: int, plane: ORSModel.ors.Plane, includeAllTouchingVoxel: bool, inverse: bool, remove: bool, IProgress: ORSModel.ors.Progress, tStep: int) → None¶ Add a 3D polygon to theROI.
Note
This method adds a 3D polygon, not a polyhedron. The points must lie on the same plane. The polygon is fill in the plane normal direction
Parameters: - ptsList (float) – the points list (a double array)
- ptsListSize (int) – the size of the point list (an int)
- plane (ORSModel.ors.Plane) – the plane on which the points lie (a Plane)
- includeAllTouchingVoxel (bool) – true to include all touching voxels, false to only include voxels where center is included
- inverse (bool) – true to add the inverse of the polygon
- remove (bool) – true to remove the polygon, false to add it
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
- tStep (int) – the T index (a uint32_t)
-
addPolygon3D(self, ptsList: float, ptsListSize: int, plane: ORSModel.ors.Plane, includeAllTouchingVoxel: bool, inverse: bool, remove: bool, IProgress: ORSModel.ors.Progress, tStep: int) → None¶ Add a 3D polygon to theROI.
Note
This method adds a 3D polygon, not a polyhedron. The points must lie on the same plane. The polygon is fill in the plane normal direction
Parameters: - ptsList (float) – the points list (a double array)
- ptsListSize (int) – the size of the point list (an int)
- plane (ORSModel.ors.Plane) – the plane on which the points lie (a Plane)
- includeAllTouchingVoxel (bool) – true to include all touching voxels, false to only include voxels where center is included
- inverse (bool) – true to add the inverse of the polygon
- remove (bool) – true to remove the polygon, false to add it
- IProgress (ORSModel.ors.Progress) – a progress object (a Progress)
- tStep (int) – the T index (a uint32_t)
-
addROI(self, aROI: ORSModel.ors.ROI) → None¶ Adds aROI to the current ROI.
Note
The ROI to add will be projected correctly if it doesn’t share the same characteristics.
Parameters: aROI (ORSModel.ors.ROI) – the ROI to add (an ROI)
-
addROIAtTOffset(self, aROI: ORSModel.ors.ROI, pTOffset: int) → None¶ Adds aROI to the current ROI, but at a specific T offset.
Note
The ROI to add will be projected correctly if it doesn’t share the same characteristics.
Parameters: - aROI (ORSModel.ors.ROI) – the ROI to add (an ROI)
- pTOffset (int) –
-
addROIAtTimeStepAtTOffset(self, aROI: ORSModel.ors.ROI, timeIndex: int, pTOffset: int) → None¶ Adds aROI to the current ROI, but at a specific T offset.
Note
The ROI to add will be projected correctly if it doesn’t share the same characteristics.
Parameters: - aROI (ORSModel.ors.ROI) – the ROI to add (an ROI)
- timeIndex (int) –
- pTOffset (int) –
-
addRectangle2D(self, plane: ORSModel.ors.Rectangle, includeAllTouchingVoxel: bool, inverse: bool, remove: bool, IProgress: ORSModel.ors.Progress, tStep: int) → None¶ Adds a 3D rectangle to theROI.
Note
This method adds a 3D rectangle. The points must lie on the same plane. The polygon is filled in the plane normal direction.
Parameters: - plane (ORSModel.ors.Rectangle) – the bounded plane on which the rectangle lies (an Rectangle)
- includeAllTouchingVoxel (bool) – true to include all touching voxels, false to only include voxels where center is included
- inverse (bool) – true to add the inverse of the polygon
- remove (bool) – true to remove the polygon, false to add it
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
- tStep (int) – time step for which to add the rectangle (a uint32_t)
-
addRectangle3D(self, plane: ORSModel.ors.Rectangle, includeAllTouchingVoxel: bool, inverse: bool, remove: bool, IProgress: ORSModel.ors.Progress, tStep: int) → None¶ Adds a 3D rectangle to theROI.
Note
This method adds a 3D rectangle. The points must lie on the same plane. The polygon is filled in the plane normal direction.
Parameters: - plane (ORSModel.ors.Rectangle) – the bounded plane on which the rectangle lies (an Rectangle)
- includeAllTouchingVoxel (bool) – true to include all touching voxels, false to only include voxels where center is included
- inverse (bool) – true to add the inverse of the polygon
- remove (bool) – true to remove the polygon, false to add it
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress)
- tStep (int) – time step for which to add the rectangle (a uint32_t)
-
addToVolumeROIAtPosition(self, xmin: int, ymin: int, zmin: int, tmin: int, inputROI: ORSModel.ors.ROI) → ROI¶ Extracts a subset from indices.
Parameters: - xmin (int) – the minimal X indicies of the subset (a uint32_t)
- ymin (int) – the maximal Y indicies of the subset (a uint32_t)
- zmin (int) – the minimal Z indicies of the subset (a uint32_t)
- tmin (int) – the time step start (a uint32_t)
- inputROI (ORSModel.ors.ROI) – the subset ROI
Returns: output (ORSModel.ors.ROI) –
-
addVoxel(self, index: int) → None¶ Adds a voxel.
Note
The index is linear within the channel data.
Note
Any changes to a Region of Interest need to be followed by a show() to refresh the screen.
Note
If many voxels need to be added, it is better to use the protocols that accept a list of voxels.
Parameters: index (int) – the index of the voxel (a int64_t)
-
addVoxelFromWorldCoordinates(self, pVect: ORSModel.ors.Vector3, timeIndex: int) → None¶ Adds point (supplied in the form of world vector) to theROI.
Parameters: - pVect (ORSModel.ors.Vector3) – pVect
- timeIndex (int) – the T index (a uint32_t)
-
addVoxelIndicesToROIIfInRange(self, indices: int, indicesSize: int, lowerThreshold: float, upperThreshold: float, pChannel: ORSModel.ors.Channel) → None¶ Adds indices to theROI, checking against a range.
Note
Only those indicies having values within the supplied range are added to the ROI.
Parameters: - indices (int) – an array of indices (a int64_t*)
- indicesSize (int) – the number of indices in the array (a int64_t)
- lowerThreshold (float) – the lower range (a double)
- upperThreshold (float) – the upper range (a double)
- pChannel (ORSModel.ors.Channel) – the channel to check against (an Channel)
-
addVoxelIntersectingBoundedPlane(self, aPlane: ORSModel.ors.Rectangle, tStep: int) → None¶ Add voxel intersecting bounded plane.
Parameters: - aPlane (ORSModel.ors.Rectangle) –
- tStep (int) –
-
addVoxelInterval(self, iStart: int, iEnd: int) → None¶ Adds a voxel interval of indicies.
Note
Every voxel within the interval will be added to the Region of Interest.
Note
The indicies are linear within the channel data.
Note
Any changes to a Region of Interest need to be followed by a show() to refresh the screen.
Parameters: - iStart (int) – the start value (inclusive) of the interval (a int64_t)
- iEnd (int) – the end value (inclusive) of the interval (a int64_t)
-
addVoxelIntervals(self, pIntervalArray: int, pNumberOfIntervals: int) → None¶ Adds a list of voxel indicies intervals.
Note
Every voxel within the interval will be added to the Region of Interest.
Note
The indicies are linear within the channel data.
Note
Any changes to a Region of Interest need to be followed by a show() to refresh the screen.
Parameters: - pIntervalArray (int) – an array of interval begin and end (inclusive) values (a int64_t*)
- pNumberOfIntervals (int) – the number of interval pairs in the array (a int32_t*)
-
addVoxels(self, indices: int, indicesSize: int) → None¶ Adds a list of voxels.
Note
The indicies are linear within the channel data.
Note
Any changes to a Region of Interest need to be followed by a show() to refresh the screen.
Note
If the array is sorted, addition will perform quicker.
Parameters: - indices (int) – an array of indicies (a int64_t*)
- indicesSize (int) – the number of indicies in the array (a int64_t)
-
addVoxelsFromWorldCoordinates(self, worldPositionArray: ORSModel.ors.ArrayDouble, timeIndex: int) → None¶ Adds indices (supplied in the form of world coordinates) to theROI.
Parameters: - worldPositionArray (ORSModel.ors.ArrayDouble) – an array of world position triplets (an ArrayDouble)
- timeIndex (int) – the T index (a uint32_t)
-
addVoxelsFromWorldCoordinatesIfInRange(self, worldPositionArray: ORSModel.ors.ArrayDouble, timeIndex: int, lowerThreshold: float, upperThreshold: float, pChannel: ORSModel.ors.Channel) → None¶ Adds indices (supplied in the form of world coordinates) to theROI, checking against a range.
Note
Very similar to addVoxelsFromWorldCoordinates(), but only those indicies having values within the supplied range are added to the ROI.
Parameters: - worldPositionArray (ORSModel.ors.ArrayDouble) – an array of world position triplets (an ArrayDouble)
- timeIndex (int) – the T index (a uint32_t)
- lowerThreshold (float) – the lower range (a double)
- upperThreshold (float) – the upper range (a double)
- pChannel (ORSModel.ors.Channel) – the channel to check against (an Channel)
-
clearROI(self) → None¶ Empties all voxel data from the region of interest.
-
clearTimeStepRange(self, pTimeStepStart: int, pTimeStepEnd: int) → None¶ Empties a time step range of the region of interest.
Parameters: - pTimeStepStart (int) – the time step start (a uint32_t)
- pTimeStepEnd (int) – the time step end (a uint32_t)
-
closeHoles(threshold, progress)¶ Creates a ROI obtained from the closing operation of the input ROI
Parameters: - threshold (float) – distance threshold
- progress (ORSModel.ors.Progress) – progress object
Returns: closedROI (ORSModel.ors.ROI) – a new ROI
-
computeAnisotropyFromMIL(self, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, iTIndex: int, lengthToAnalyze: float, samplingDistance: float, countOrientations: int, minStarCount: int, maxStarCount: int, tolerance: float, IProgress: ORSModel.ors.Progress) → float¶ Computes the anisotropy of aROI using the Mean Intercept Length (MIL) in the specified region.
Parameters: - minX (int) – the minimum X range (a uint32_t)
- minY (int) – the minimum Y range (a uint32_t)
- minZ (int) – the minimum Z range (a uint32_t)
- maxX (int) – the maximum X range (a uint32_t)
- maxY (int) – the maximum Y range (a uint32_t)
- maxZ (int) – the maximum Z range (a uint32_t)
- iTIndex (int) – the T index (a uint32_t)
- lengthToAnalyze (float) – the distance to analyze per orientation per star (a double)
- samplingDistance (float) – the distance between each sample on the line of analysis (a double)
- countOrientations (int) – the count of lines to analyze per star (a uint32_t)
- minStarCount (int) – the minimal count of star to iterate on (a uint32_t)
- maxStarCount (int) – the maximal count of star to iterate on (a uint32_t)
- tolerance (float) – the smallest variance of anisotropy to reach before ending the iterations (a double)
- IProgress (ORSModel.ors.Progress) – an optional progress object (a Progress)
Returns: output (float) – the anisotropy value (a double)
-
computeAnisotropyFromSVD(self, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, iTIndex: int, lengthToAnalyze: float, samplingDistance: float, countOrientations: int, minStarCount: int, maxStarCount: int, tolerance: float, IProgress: ORSModel.ors.Progress) → float¶ Computes the anisotropy of aROI using the Star Volume Distribution (SVD) in the specified region.
Parameters: - minX (int) – the minimum X range (a uint32_t)
- minY (int) – the minimum Y range (a uint32_t)
- minZ (int) – the minimum Z range (a uint32_t)
- maxX (int) – the maximum X range (a uint32_t)
- maxY (int) – the maximum Y range (a uint32_t)
- maxZ (int) – the maximum Z range (a uint32_t)
- iTIndex (int) – the T index (a uint32_t)
- lengthToAnalyze (float) – the distance to analyze per orientation per star (a double)
- samplingDistance (float) – the distance between each sample on the line of analysis (a double)
- countOrientations (int) – the count of lines to analyze per star (a uint32_t)
- minStarCount (int) – the minimal count of star to iterate on (a uint32_t)
- maxStarCount (int) – the maximal count of star to iterate on (a uint32_t)
- tolerance (float) – the smallest variance of anisotropy to reach before ending the iterations (a double)
- IProgress (ORSModel.ors.Progress) – an optional progress object (a Progress)
Returns: output (float) – the anisotropy value (a double)
-
computeAnisotropyMappingFromMIL(self, iTIndex: int, channelToFill: ORSModel.ors.Channel, vectorFieldEigenvectorMax: ORSModel.ors.VectorField, lengthToAnalyze: float, samplingDistance: float, countOrientations: int, IProgress: ORSModel.ors.Progress) → None¶ Computes the anisotropy mapping of aROI at the specified locations using the mean intercept length (MIL)
Note
The vector field object will be cleared before being filled with the current information.
Parameters: - iTIndex (int) – the T index (a uint32_t)
- channelToFill (ORSModel.ors.Channel) – the channel to fill at each voxel location (an Channel)
- vectorFieldEigenvectorMax (ORSModel.ors.VectorField) – the vector field (eigenvector associated to the highest eigenvalue) to fill at each voxel location of the given channel (a VectorField)
- lengthToAnalyze (float) – the distance to analyze per orientation per star (a double)
- samplingDistance (float) – the distance between each sample on the line of analysis (a double)
- countOrientations (int) – the count of lines to analyze per star (a uint32_t)
- IProgress (ORSModel.ors.Progress) – an optional progress object (a Progress)
-
computeAnisotropyMappingFromSurfaceNormals(self, iTIndex: int, channelToFill: ORSModel.ors.Channel, vectorFieldEigenvectorMax: ORSModel.ors.VectorField, channelToFillNormOfGradient: ORSModel.ors.Channel, channelToFillDivergence: ORSModel.ors.Channel, vectorFieldCurl: ORSModel.ors.VectorField, channelToFillNormOfCurl: ORSModel.ors.Channel, radiusOfInfluence: float, useProjectionBasedAnisotropy: bool, meshSmoothingRepetitions: int, IProgress: ORSModel.ors.Progress) → None¶ Computes the anisotropy mapping of aROI at the specified locations using the surface normals.
Note
The vector field object will be cleared before being filled with the current information.
Parameters: - iTIndex (int) – the T index (a uint32_t)
- channelToFill (ORSModel.ors.Channel) – the channel (anisotropy) to fill at each voxel location (a Channel)
- vectorFieldEigenvectorMax (ORSModel.ors.VectorField) – the vector field (eigenvector associated to the highest eigenvalue) to fill at each voxel location of the given channel (a VectorField)
- channelToFillNormOfGradient (ORSModel.ors.Channel) – the channel (norm of the gradient of the orientation) to fill at each voxel location (a Channel)
- channelToFillDivergence (ORSModel.ors.Channel) – the channel (divergence of the orientation) to fill at each voxel location (a Channel)
- vectorFieldCurl (ORSModel.ors.VectorField) – the vector field (curl of the orientation) to fill at each voxel location of the given channel (a VectorField)
- channelToFillNormOfCurl (ORSModel.ors.Channel) – the channel (norm of the curl of the orientation) to fill at each voxel location (a Channel)
- radiusOfInfluence (float) – distance from the analysis point to the last considered anisotropy element (a double)
- useProjectionBasedAnisotropy (bool) – anisotropy computation method. If true, the projection based method is used; if false, the eigenvalues from the tensor of inertia are taken (a bool)
- meshSmoothingRepetitions (int) – the number of times the mesh obtained from the ROI should be smoothed before computing the anisotropy (an uint32_t)
- IProgress (ORSModel.ors.Progress) – an optional progress object (a Progress)
-
computeGraph(self, IProgress: ORSModel.ors.Progress) → Graph¶ Computes the graph of theROI’s connectivity.
Note
The receiver ROI should already be skeletonized.
Parameters: IProgress (ORSModel.ors.Progress) – a progress object (an Progress) Returns: output (ORSModel.ors.Graph) – graph of the ROI’s connectivity
-
computeVolumeFractionMapping(self, iTIndex: int, channelToFill: ORSModel.ors.Channel, radius: float, IProgress: ORSModel.ors.Progress) → None¶ Computes the volume fraction mapping of aROI at the specified locations.
Parameters: - iTIndex (int) – the T index (a uint32_t)
- channelToFill (ORSModel.ors.Channel) – the channel to fill at each voxel location (an Channel)
- radius (float) – distance from the analysis point to the last considered ROI element (a double)
- IProgress (ORSModel.ors.Progress) – an optional progress object (a Progress)
-
convertToChannel(value=255)¶ Helper for setting the attribute of the object following the preferences
Parameters: value (int) – value to put in the Channel (should be between 0 and 255) Return: Rtype: ORSModel.ors.Channel
-
copyInto(self, aROI: ORSModel.ors.ROI) → None¶ Copies the receiver into anotherROI.
Parameters: aROI (ORSModel.ors.ROI) – a destination ROI (an Volume)
-
dijkstra3DGrow(self, inputChannel: ORSModel.ors.Channel, volumeToGrowIn: ORSModel.ors.Box, volumeOfTheGrow: float, timeStep: int) → None¶ Parameters: - inputChannel (ORSModel.ors.Channel) –
- volumeToGrowIn (ORSModel.ors.Box) –
- volumeOfTheGrow (float) –
- timeStep (int) –
-
dilate(self, pNumberOfIterations: int, pTimeStep: int, progress: ORSModel.ors.Progress) → None¶ Dilates (grows) theROI.
Note
Every voxel of the channel that touches the ROI is added to it, for the given time step.
Parameters: - pNumberOfIterations (int) – the number of dilate iterations (a uint16_t)
- pTimeStep (int) – the time step (a uint32_t)
- progress (ORSModel.ors.Progress) – a progress object (a Progress)
-
duplicateTimeStepDataAcrossAllTimeSteps(self, pSourceTimeStep: int) → None¶ Duplicates data from one time step to all time steps.
Note
The data from the source time step is copied to all the time steps of the ROI.
Parameters: pSourceTimeStep (int) – the source time step (a uint32_t)
-
erode(self, pNumberOfIterations: int, pTimeStep: int, progress: ORSModel.ors.Progress) → None¶ Erodes (shrinks) theROI.
Note
Every voxel of the ROI that touches the channel is removed from the ROI, for the given time step.
Parameters: - pNumberOfIterations (int) – the number of erode iterations (a uint16_t)
- pTimeStep (int) – the time step (a uint32_t)
- progress (ORSModel.ors.Progress) – a progress object (a Progress)
-
exchangeInternalData(self, aROI: ORSModel.ors.ROI) → bool¶ Exchanges (swaps) internal data between the receiver and the argumentROI.
Note
Both ROIs must have same spatial characteristics.
Parameters: aROI (ORSModel.ors.ROI) – a ROI (an ROI) Returns: output (bool) – true if swap was successful, false otherwise
-
extractCenterLinePaths(self, aSourceROI: ORSModel.ors.ROI, aTargetROI: ORSModel.ors.ROI) → List¶ Parameters: - aSourceROI (ORSModel.ors.ROI) –
- aTargetROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.List) –
-
extractMinimumLengthPaths(self, aSourceROI: ORSModel.ors.ROI, aTargetROI: ORSModel.ors.ROI) → List¶ Parameters: - aSourceROI (ORSModel.ors.ROI) –
- aTargetROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.List) –
-
extractSmoothPaths(self, aSourceROI: ORSModel.ors.ROI, aTargetROI: ORSModel.ors.ROI, fastMarchingGeometricBias: float, centered: bool) → List¶ Parameters: - aSourceROI (ORSModel.ors.ROI) –
- aTargetROI (ORSModel.ors.ROI) –
- fastMarchingGeometricBias (float) –
- centered (bool) –
Returns: output (ORSModel.ors.List) –
-
fillAllInnerHoles2DAlongDirection(self, dirX: float, dirY: float, dirZ: float, considerDiagonal: bool) → None¶ Fills all inner holes of 2D slices along any direction.
Note
This method fills the interior of a ROI for each 2D slice along the supplied direction.
Note
This method fills 2D slices by looking for escape openings. Using 26 neighbors enforces more rigidity in the algorithm to determine if a neighboring voxel is an opening or not.
Parameters: - dirX (float) – the X component of the direction (a double)
- dirY (float) – the Y component of the direction (a double)
- dirZ (float) – the Z component of the direction (a double)
- considerDiagonal (bool) – true to use 26 neighbors, false to use 6 neighbors (see note below)
-
fillAllInnerHoles2DAlongXAxis(self, iTIndex: int, considerDiagonal: bool) → None¶ Fills all X slices’ inner holes.
Note
This method fills the interior of a ROI for each 2D slice along the X axis.
Note
This method fills a ROI’s interior by looking for escape openings. Using 26 neighbors enforces more rigidity in the algorithm to determine if a neighboring voxel is an opening or not.
Parameters: - iTIndex (int) – the T index (a uint32_t)
- considerDiagonal (bool) – true to use 26 neighbors, false to use 6 neighbors (see note below)
-
fillAllInnerHoles2DAlongYAxis(self, iTIndex: int, considerDiagonal: bool) → None¶ Fills all Y slices’ inner holes.
Note
This method fills the interior of a ROI for each 2D slice along the Y axis.
Note
This method fills a ROI’s interior by looking for escape openings. Using 26 neighbors enforces more rigidity in the algorithm to determine if a neighboring voxel is an opening or not.
Parameters: - iTIndex (int) – the T index (a uint32_t)
- considerDiagonal (bool) – true to use 26 neighbors, false to use 6 neighbors (see note below)
-
fillAllInnerHoles2DAlongZAxis(self, iTIndex: int, considerDiagonal: bool) → None¶ Fills all Z slices’ inner holes.
Note
This method fills the interior of a ROI for each 2D slice along the Z axis.
Note
This method fills a ROI’s interior by looking for escape openings. Using 26 neighbors enforces more rigidity in the algorithm to determine if a neighboring voxel is an opening or not.
Parameters: - iTIndex (int) – the T index (a uint32_t)
- considerDiagonal (bool) – true to use 26 neighbors, false to use 6 neighbors (see note below)
-
fillInnerHoles(self, iTIndex: int, considerDiagonal: bool) → None¶ Fills theROI’s interior.
Note
This method fills a ROI’s interior by looking for escape openings. Using 26 neighbors enforces more rigidity in the algorithm to determine if a neighboring voxel is an opening or not.
Note
When trying to close a 2D ROI (for example a circle), you need to work with a 2D ROI (i.e. Z size = 1).
Parameters: - iTIndex (int) – the T index (a uint32_t)
- considerDiagonal (bool) – true to use 26 neighbors, false to use 6 neighbors (see note below)
-
fillInnerHoles2D(self, pCenter: ORSModel.ors.Vector3, pDirection: ORSModel.ors.Vector3, considerDiagonal: bool) → None¶ Fills theROI’s interior in 2D.
Note
This method fills a ROI’s interior by looking for escape openings. Using 26 neighbors enforces more rigidity in the algorithm to determine if a neighboring voxel is an opening or not.
Note
This method fills the interior of a ROI on a single 2D plane.
Parameters: - pCenter (ORSModel.ors.Vector3) – a vector describing the 2D plane’s center point (an Vector3)
- pDirection (ORSModel.ors.Vector3) – a vector describing the direction of the plane (an Vector3)
- considerDiagonal (bool) – true to use 26 neighbors, false to use 6 neighbors (see note below)
-
fillIntervalArrays(self, pOutputLow: ORSModel.ors.ArrayUnsignedLong, pOutputHigh: ORSModel.ors.ArrayLONGLONG) → None¶ Extracts indicies in the form of intervals.
Returns: - pOutputLow (ORSModel.ors.ArrayUnsignedLong) – an output array for lower indicies (an ArrayUnsignedLong)
- pOutputHigh (ArrayLONGLONG) – an output array for higher indicies (an ArrayLONGLONG)
-
generateAnalyzer(self, aTimeStep: int, inputChannel: ORSModel.ors.Channel, longestDistance: bool, longestSegment: bool, inertiaTensorPrincipalComponent: bool, surfaceArea: bool, centerOfMass: bool, IProgress: ORSModel.ors.Progress) → ROIAnalyzer¶ Parameters: - aTimeStep (int) –
- inputChannel (ORSModel.ors.Channel) –
- longestDistance (bool) –
- longestSegment (bool) –
- inertiaTensorPrincipalComponent (bool) –
- surfaceArea (bool) –
- centerOfMass (bool) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.ROIAnalyzer) –
-
getAllFeretDiameter(self, min: float, mean: float, max: float, iTIndex: int, iAngleSampling: int) → bool¶ Get Sorted feret diameter.
Parameters: - min (float) – the T index (a uint32_t)
- mean (float) – the angle sampling, steps between each angle iteration (a uint16_t)
- max (float) –
- iTIndex (int) –
- iAngleSampling (int) –
Returns: output (bool) – true if worked, else false (bool)
-
getAsCubicMesh(self, bWorld: bool, IProgress: ORSModel.ors.Progress, IInMesh: ORSModel.ors.Mesh) → Mesh¶ Generates a cubic mesh model from theROI.
Note
If a target Mesh is supplied, data is written to it and returned, otherwise a new Mesh is created.
Parameters: - bWorld (bool) – true to have the resulting mesh model in world coordinates, false in local
- IProgress (ORSModel.ors.Progress) – a progress object or NULL to show no progress (an Progress)
- IInMesh (ORSModel.ors.Mesh) – an optional target mesh model (an Mesh)
Returns: output (ORSModel.ors.Mesh) – the resulting mesh model (an Mesh)
-
getAsCubicMeshForTIndex(self, bWorld: bool, timeStep: int, IProgress: ORSModel.ors.Progress, IInMesh: ORSModel.ors.Mesh) → Mesh¶ Generates a cubic mesh model from theROI.
Note
If a target Mesh is supplied, data is written to it and returned, otherwise a new Mesh is created.
Parameters: - bWorld (bool) – true to have the resulting mesh model in world coordinates, false in local
- timeStep (int) – the TimeStep to extract (a uint32_t)
- IProgress (ORSModel.ors.Progress) – a progress object or NULL to show no progress (an Progress)
- IInMesh (ORSModel.ors.Mesh) – an optional target mesh model (an Mesh)
Returns: output (ORSModel.ors.Mesh) – the resulting mesh model (an Mesh)
-
getAsMarchingCubesMesh(self, isovalue: float, bSnapToContour: bool, flipNormal: bool, timeStep: int, xSample: int, ySample: int, zSample: int, pNearest: bool, pWorld: bool, IProgress: ORSModel.ors.Progress, pMesh: ORSModel.ors.Mesh) → Mesh¶ Creates a marching cube from theROI.
Note
The isovalue is used as a threshold, any value below it (inclusive) is not considered.
Note
If a mesh model is supplied as the last argument, the results are written to it, otherwise a new mesh model is created.
Note
Currently only nearest sampling is supported.
Parameters: - isovalue (float) – an isovalue (a float)
- bSnapToContour (bool) – true to snap vertices to contour, false to interpolate
- flipNormal (bool) – true flips normals, false doesn’t
- timeStep (int) – the time step to use (a uint32_t)
- xSample (int) – the X sampling (a uint16_t, 1 means no sampling)
- ySample (int) – the Y sampling (a uint16_t, 1 means no sampling)
- zSample (int) – the Z sampling (a uint16_t, 1 means no sampling)
- pNearest (bool) – true to sample to nearest value, false to sample linearly (if sampling is 1 this flag is ignored)
- pWorld (bool) – true to have the resulting mesh model in world coordinates, false in local
- IProgress (ORSModel.ors.Progress) – a progress object, NULL for no progress (an Progress)
Returns: - output (ORSModel.ors.Mesh) – the resulting mesh model (an Mesh)
- pMesh (ORSModel.ors.Mesh) – an optional output mesh model (an Mesh)
-
getAsROIClipped(self, minX: int, minY: int, minZ: int, minT: int, maxX: int, maxY: int, maxZ: int, maxT: int, aROI: ORSModel.ors.ROI) → ROI¶ Clips theROI to the specified region.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - minX (int) – the X min dimension of the clip region (a uint32_t)
- minY (int) – the Y min dimension of the clip region (a uint32_t)
- minZ (int) – the Z min dimension of the clip region (a uint32_t)
- minT (int) – the T min dimension of the clip region (a uint32_t)
- maxX (int) – the X max dimension of the clip region (a uint32_t)
- maxY (int) – the Y max dimension of the clip region (a uint32_t)
- maxZ (int) – the Z max dimension of the clip region (a uint32_t)
- maxT (int) – the T max dimension of the clip region (a uint32_t)
- aROI (ORSModel.ors.ROI) – an optional target ROI (an ROI)
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIClosedWithKernel(self, pKernel: ORSModel.ors.ConvolutionKernel, pInRoi: ORSModel.ors.ROI, pTimeStep: int) → ROI¶ Closes theROI according to a supplied 3D kernel.
Note
The 3D kernel needs not be symmetric, but each dimension must be odd, for the center always represents the current voxel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the kernel (an ConvolutionKernel)
- pInRoi (ORSModel.ors.ROI) – an optional output ROI (an ROI)
- pTimeStep (int) –
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIDilatedWithKernel(self, pKernel: ORSModel.ors.ConvolutionKernel, pInRoi: ORSModel.ors.ROI, pTimeStep: int, progress: ORSModel.ors.Progress) → ROI¶ Dilates (grows) theROI according to a supplied 3D kernel.
Note
The 3D kernel needs not be symmetric, but each dimension must be odd, for the center always represents the current voxel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the kernel (an ConvolutionKernel)
- pInRoi (ORSModel.ors.ROI) – an optional output ROI (an ROI)
- pTimeStep (int) – the time step (a uint32_t)
- progress (ORSModel.ors.Progress) – an optional progress object (a Progress)
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIErodedWithKernel(self, pKernel: ORSModel.ors.ConvolutionKernel, pInRoi: ORSModel.ors.ROI, pTimeStep: int, progress: ORSModel.ors.Progress) → ROI¶ Erodes (shrinks) theROI according to a supplied 3D kernel.
Note
The 3D kernel needs not be symmetric, but each dimension must be odd, for the center always represents the current voxel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the kernel (an ConvolutionKernel)
- pInRoi (ORSModel.ors.ROI) – an optional output ROI (an ROI)
- pTimeStep (int) – the time step (a uint32_t)
- progress (ORSModel.ors.Progress) – an optional progress object (a Progress)
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIFromTimeStepsUnion(self, pTimeStep1: int, pTimeStep2: int, anOutputROI: ORSModel.ors.ROI) → ROI¶ Merges (union) 2 time steps of theROI.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Note
The output ROI will always have a T dimension of 1, and the same X/Y/Z sizes as the source ROI.
Note
Because of the previous note, the output ROI cannot be the same as the receiver ROI (i.e. cannot merge into itself).
Parameters: - pTimeStep1 (int) – source time step (a uint32_t)
- pTimeStep2 (int) – time step to merge with (a uint32_t)
- anOutputROI (ORSModel.ors.ROI) – the output ROI (an ROI), see note below
Returns: output (ORSModel.ors.ROI) – the merged ROI
-
getAsROIMovedInChannel(self, pInputData: ORSModel.ors.Channel, xOffset: int, yOffset: int, zOffset: int, pTargetROI: ORSModel.ors.ROI) → ROI¶ Moves theROI by a given offset in a channel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - pInputData (ORSModel.ors.Channel) – the source channel (an Channel)
- xOffset (int) – an X voxel offset (a uint32_t)
- yOffset (int) – a Y voxel offset (a uint32_t)
- zOffset (int) – a Z voxel offset (a uint32_t)
- pTargetROI (ORSModel.ors.ROI) – an optional output ROI (an ROI)
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIOpenWithKernel(self, pKernel: ORSModel.ors.ConvolutionKernel, pInRoi: ORSModel.ors.ROI, pTimeStep: int) → ROI¶ Opens theROI according to a supplied 3D kernel.
Note
The 3D kernel needs not be symmetric, but each dimension must be odd, for the center always represents the current voxel.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - pKernel (ORSModel.ors.ConvolutionKernel) – the kernel (an ConvolutionKernel)
- pInRoi (ORSModel.ors.ROI) – an optional output ROI (an ROI)
- pTimeStep (int) – the time step (a uint32_t)
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getAsROIThinned(self, aROI: ORSModel.ors.ROI) → ROI¶ Parameters: aROI (ORSModel.ors.ROI) – Returns: output (ORSModel.ors.ROI) –
-
getBoxGrownToContainVoxels(self, aBox: ORSModel.ors.Box, timeStep: int) → Box¶ Grow the given box so that it include all the voxels of the specified time step.
Parameters: - aBox (ORSModel.ors.Box) – the box to grow
- timeStep (int) –
Returns: output (ORSModel.ors.Box) – the resulting Box (a Box)
-
getCenterOfMass(self, pTimeStep: int) → Vector3¶ Computes theROI’s center of mass.
Parameters: pTimeStep (int) – Returns: output (ORSModel.ors.Vector3) – the center of mass (an XYZ vector) (an Vector3)
-
getCircumferenceAreaAndMinMaxDiameter(self, pBoundedPlane: ORSModel.ors.Rectangle, pointInside: ORSModel.ors.Vector3, nTimeStep: int, area: float, circumference: float, meanDiameter: float, maxDiameterPoint0: ORSModel.ors.Vector3, maxDiameterPoint1: ORSModel.ors.Vector3, minDiameter0: ORSModel.ors.Vector3, minDiameter1: ORSModel.ors.Vector3) → None¶ Parameters: - pBoundedPlane (ORSModel.ors.Rectangle) –
- pointInside (ORSModel.ors.Vector3) –
- nTimeStep (int) –
- area (float) –
- circumference (float) –
- meanDiameter (float) –
- maxDiameterPoint0 (ORSModel.ors.Vector3) –
- maxDiameterPoint1 (ORSModel.ors.Vector3) –
- minDiameter0 (ORSModel.ors.Vector3) –
- minDiameter1 (ORSModel.ors.Vector3) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getClipBox(timestep=0, display=None)¶ Gets the clip box of the ROI or of the MultiROI
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: aClipBox (ORSModel.ors.Box) – the clip box
-
getClipping(timestep=0, display=None)¶ Gets the origin and the opposite summit of the clip box of the ROI or MultiROI
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: - clipOriginSummit (ORSModel.ors.Vector3) – the origin summit of the clip box
- clipOppositeSummit (ORSModel.ors.Vector3) – the origin opposite summit of the clip box
-
getConnectedComponent(self, iTIndex: int, considerDiagonal: bool, IProgress: ORSModel.ors.Progress, pInData: ORSModel.ors.MultiROI) → MultiROI¶ Connected connectivity analysis of theROI.
Note
This method labels areas of the ROI by finding adjacent voxels and labelling them with sequential numbering.
Note
If a multi ROI object is supplied as the last argument, the results are written to it, otherwise a new one is created.
Parameters: - iTIndex (int) – the T index (a uint32_t)
- considerDiagonal (bool) – true to consider diagonals, false otherwise
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress), or NULL for no progress
- pInData (ORSModel.ors.MultiROI) – an optional output object (an MultiROI)
Returns: output (ORSModel.ors.MultiROI) – the resulting object (an MultiROI)
-
getContour(self, pPlane: ORSModel.ors.Plane, nTimeStep: int, pfPoints: ORSModel.ors.Array) → None¶ Parameters: - pPlane (ORSModel.ors.Plane) –
- nTimeStep (int) –
- pfPoints (ORSModel.ors.Array) –
-
getContour2(self, pBoudedPlane: ORSModel.ors.Rectangle, nTimeStep: int, pfPoints: ORSModel.ors.Array) → None¶ Parameters: - pBoudedPlane (ORSModel.ors.Rectangle) –
- nTimeStep (int) –
- pfPoints (ORSModel.ors.Array) –
-
getContourOrdered(self, pPlane: ORSModel.ors.Plane, nTimeStep: int, pfPoints: ORSModel.ors.Array, pnIndexes: ORSModel.ors.ArrayLong) → None¶ GetROI contours Sorts the labels on their sizes, in descending order.
Note
Many contours may be found. The indexes array contains the start index (in the point array) of the nth contour and the number of points it contains at the location 2*n and 2*n+1 respectively.
Parameters: - pPlane (ORSModel.ors.Plane) – The cut plane (a Plane)
- nTimeStep (int) – The time step (a uint32_t)
- pfPoints (ORSModel.ors.Array) – The point array to fill (an ArrayFloat)
- pnIndexes (ORSModel.ors.ArrayLong) – The indexes array to fill (an ArrayLong)
-
getContourOrdered2(self, pBoudedPlane: ORSModel.ors.Rectangle, nTimeStep: int, pfPoints: ORSModel.ors.Array, pnIndexes: ORSModel.ors.ArrayLong) → None¶ GetROI contours Sorts the labels on their sizes, in descending order.
Note
Many contours may be found. The indexes array contains the start index (in the point array) of the nth contour and the number of points it contains at the location 2*n and 2*n+1 respectively.
Parameters: - pBoudedPlane (ORSModel.ors.Rectangle) – The cut plane (a Plane)
- nTimeStep (int) – The time step (a uint32_t)
- pfPoints (ORSModel.ors.Array) – The point array to fill (an ArrayFloat)
- pnIndexes (ORSModel.ors.ArrayLong) – The indexes array to fill (an ArrayLong)
-
getEndPoints(self, aROI: ORSModel.ors.ROI) → ROI¶ Parameters: aROI (ORSModel.ors.ROI) – Returns: output (ORSModel.ors.ROI) –
-
getFeretBox(self, iTIndex: int, iAngleSampling: int) → Box¶ Get Feret box ofROI.
Note
Default value for angle sampling is 5
Parameters: - iTIndex (int) – the T index (a uint32_t)
- iAngleSampling (int) – the angle sampling, steps between each angle iteration (a uint16_t)
Returns: output (Box) –
-
getFromTimeStepRange(self, pTimeStepStart: int, pTimeStepEnd: int, anOutputROI: ORSModel.ors.ROI) → ROI¶ Extracts a T range from the region of interest, as a new region of interest.
Parameters: - pTimeStepStart (int) – the time step start (a uint32_t)
- pTimeStepEnd (int) – the time step end (a uint32_t)
- anOutputROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.ROI) –
-
getHasDataWithinArea(self, xmin: int, ymin: int, zmin: int, tmin: int, xmax: int, ymax: int, zmax: int, tmax: int) → bool¶ Queries theROI to know if it has data within a specific range of indicies.
Parameters: - xmin (int) – the minimal x coordinate (a uint32_t)
- ymin (int) – the minimal y coordinate (a uint32_t)
- zmin (int) – the minimal z coordinate (a uint32_t)
- tmin (int) – the minimal t coordinate (a uint32_t)
- xmax (int) – the maximal x coordinate (a uint32_t)
- ymax (int) – the maximal y coordinate (a uint32_t)
- zmax (int) – the maximal z coordinate (a uint32_t)
- tmax (int) – the maximal t coordinate (a uint32_t)
Returns: output (bool) – true if receiver has data within the range (inclusive), false otherwise
-
getHasDataWithinRange(self, startIndex: int, endIndex: int) → bool¶ Queries theROI to know if it has data within a specific range of indicies.
Parameters: - startIndex (int) – the starting index (a int64_t)
- endIndex (int) – the ending index (a int64_t)
Returns: output (bool) – true if receiver has data within the range (inclusive), false otherwise
-
getHasVoxelIndex(self, index: int) → bool¶ Verifies if the receiverROI contains a specified voxel index.
Parameters: index (int) – a voxel index (a int64_t) Returns: output (bool) – true if the ROI contains the index, false otherwise
-
getHistogramData(self, pNumberOfBins: int, pTimeStep: int, IChannel: ORSModel.ors.Channel) → HistogramData¶ Gets a histogram of theROI’s underlying data (from its channel).
Parameters: - pNumberOfBins (int) – the number of desired bins (a uint32_t)
- pTimeStep (int) – the T index (a uint32_t)
- IChannel (ORSModel.ors.Channel) – the data channel (a Channel)
Returns: output (ORSModel.ors.HistogramData) – a histogram (an HistogramData)
-
getInertiaAxis(self, first: ORSModel.ors.Vector3, second: ORSModel.ors.Vector3, third: ORSModel.ors.Vector3, pTimeStep: int) → None¶ Computes theROI’s inertia tensor eigen vector.
Note
The eigen vector are sorted by eigen value, first is the int32_t*ues .. The norm of the vectors are the eigen value
Parameters: - first (ORSModel.ors.Vector3) –
- second (ORSModel.ors.Vector3) –
- third (ORSModel.ors.Vector3) –
- pTimeStep (int) –
-
getInitialColor(self) → Color¶ Gets the initialROI color.
Note
The color is expressed in RGB fashion.
Returns: output (ORSModel.ors.Color) – a color (an Color)
-
getInterfacialSurface(self, pOtherROI: ORSModel.ors.ROI, timeStep: int, progressBar: ORSModel.ors.Progress) → float¶ Gets theROI’s surface interfacial area estimation of digital (weighted voxel estimation).
Note
The algorithm checks 8 vertices neighbors for each voxel to determine surfaces. If a neighbor is empty, it means that the voxel’s side is a surface. Then, a weight is given for each border voxel type. (Lindblad, J. (2005). Surface area estimation of digitized 3D objects using weighted local configurations. Image and Vision Computing, 23(2), 111-122.)
Parameters: - pOtherROI (ORSModel.ors.ROI) – the other ROI (a ROI)
- timeStep (int) – time step for which we want the surface
- progressBar (ORSModel.ors.Progress) – an optional progress object (a Progress)
Returns: output (float) – the total surface area (a double)
-
getIntersectionWithROI(self, aROI: ORSModel.ors.ROI, anOutputROI: ORSModel.ors.ROI) → ROI¶ Intersects theROI with another ROI.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Note
The output ROI can be the same as the receiver ROI (i.e. can intersect with another ROI into itself).
Parameters: - aROI (ORSModel.ors.ROI) – the ROI to intersect with (an ROI)
- anOutputROI (ORSModel.ors.ROI) – the output ROI (an ROI), see note below
Returns: output (ORSModel.ors.ROI) – the intersected ROI
-
getIsClipped(timestep=0, display=None)¶ Gets to know if the clip box of the ROI or MultiROI is active
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: isClipped (bool) – if True, the clip box of the ROI or MultiROI is visible; False otherwise.
-
getIsEmpty(self) → bool¶ Sees if theROI contains data.
Returns: output (bool) – true if ROI contains no data, false otherwise
-
getLabel(self) → int¶ Gets theROI label.
Note
A ROI label is a unsigned short value that can be associated to the ROI. Each ROI has one label.
Returns: output (int) – a label (a uint16_t)
-
getLabelization(self, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, iTIndex: int, considerDiagonal: bool, IProgress: ORSModel.ors.Progress, pInData: ORSModel.ors.MultiROI) → MultiROI¶ Connected connectivity analysis of theROI.
Note
This method labels areas of the ROI by finding adjacent voxels and labelling them with sequential numbering.
Note
If a multi ROI object is supplied as the last argument, the results are written to it, otherwise a new one is created.
Parameters: - minX (int) – the minimum X range (a uint32_t)
- minY (int) – the minimum Y range (a uint32_t)
- minZ (int) – the minimum Z range (a uint32_t)
- maxX (int) – the maximum X range (a uint32_t)
- maxY (int) – the maximum Y range (a uint32_t)
- maxZ (int) – the maximum Z range (a uint32_t)
- iTIndex (int) – the T index (a uint32_t)
- considerDiagonal (bool) – true to consider diagonals, false otherwise
- IProgress (ORSModel.ors.Progress) – a progress object (an Progress), or NULL for no progress
- pInData (ORSModel.ors.MultiROI) – an optional output object (an MultiROI)
Returns: output (ORSModel.ors.MultiROI) – the resulting object (an MultiROI)
-
getLocalBoundingBoxMax(self, timeStep: int) → Vector3¶ Gets the upper-right corner of the visual’s bounding box.
Parameters: timeStep (int) – timeStep (a uint32_t) Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
getLocalBoundingBoxMin(self, timeStep: int) → Vector3¶ Gets the lower-left corner of the visual’s bounding box.
Parameters: timeStep (int) – timeStep (uint32_t) Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
getMaxIndex(self) → int¶ Gets the largest index of theROI.
Returns: output (int) – a channel voxel index (a int64_t)
-
getMaxSourceDataValue(self, pTimeStep: int, pInputData: ORSModel.ors.Channel) → float¶ Gets the maximum source voxel value of theROI for a given channel.
Note
The value returned is in the same type as the source channel, but converted to a double.
Parameters: - pTimeStep (int) – the T index (a uint32_t)
- pInputData (ORSModel.ors.Channel) – the source channel (an Channel)
Returns: output (float) – a voxel value (a double)
-
getMeanSourceDataValue(self, pTimeStep: int, pInputData: ORSModel.ors.Channel) → float¶ Gets the mean source voxel value of theROI for a given channel.
Note
The value returned is in the same type as the source channel, but converted to a double.
Parameters: - pTimeStep (int) – the T index (a uint32_t)
- pInputData (ORSModel.ors.Channel) – the source channel (an Channel)
Returns: output (float) – a voxel value (a double)
-
getMinIndex(self) → int¶ Gets the smallest index of theROI.
Returns: output (int) – a channel voxel index (a int64_t)
-
getMinSourceDataValue(self, pTimeStep: int, pInputData: ORSModel.ors.Channel) → float¶ Gets the minimum source voxel value of theROI for a given channel.
Note
The value returned is in the same type as the source channel, but converted to a double.
Parameters: - pTimeStep (int) – the T index (a uint32_t)
- pInputData (ORSModel.ors.Channel) – the source channel (an Channel)
Returns: output (float) – a voxel value (a double)
-
getMinimalBox(self, iTIndex: int) → Box¶ Get mininal box ofROI (also know as Oriented Bounding Box in literature)
Parameters: iTIndex (int) – the T index (a uint32_t) Returns: output (Box) –
-
getProjectionIn(self, pChannel: ORSModel.ors.Channel, sourceTimeOffset: int, pProgress: ORSModel.ors.Progress) → ROI¶ Projects theROI in a channel’s spatial box.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: - pChannel (ORSModel.ors.Channel) – the target channel (an Channel)
- sourceTimeOffset (int) – a progress object (an Progress) or NULL for no progress
- pProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getReversed(self, pTargetROI: ORSModel.ors.ROI) → ROI¶ Reverses theROI.
Note
A reversed ROI contains exactly the data not present in the receiver ROI.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Parameters: pTargetROI (ORSModel.ors.ROI) – an optional output ROI (an ROI) Returns: output (ORSModel.ors.ROI) – the resulting ROI (an ROI)
-
getShowContour(self) → bool¶ Returns: output (bool) –
-
getShowContourCubic(self) → bool¶ Returns: output (bool) –
-
getShowContourInterpolated(self) → bool¶ Returns: output (bool) –
-
getSimplePoints(self, aROI: ORSModel.ors.ROI) → ROI¶ Parameters: aROI (ORSModel.ors.ROI) – Returns: output (ORSModel.ors.ROI) –
-
getSimplifiedGraphMesh(self, aROI: ORSModel.ors.ROI, aResultMesh: ORSModel.ors.Mesh, aSurfaceMesh: ORSModel.ors.Mesh) → ROI¶ Parameters: - aROI (ORSModel.ors.ROI) –
- aResultMesh (ORSModel.ors.Mesh) –
- aSurfaceMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.ROI) –
-
getStandardDeviationSourceDataValue(self, pTimeStep: int, pInputData: ORSModel.ors.Channel) → float¶ Gets the standard deviation of the source voxels of theROI for a given channel.
Note
The value returned is in the same type as the source channel, but converted to a double.
Parameters: - pTimeStep (int) – the T index (a uint32_t)
- pInputData (ORSModel.ors.Channel) – the source channel (an Channel)
Returns: output (float) – a voxel value (a double)
-
getSubtractionFromROI(self, aROI: ORSModel.ors.ROI, pOutputROI: ORSModel.ors.ROI) → ROI¶ Subtracts anotherROI from the receiver ROI.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Note
The output ROI can be the same as the receiver ROI (i.e. can subtract another ROI into itself), but the output ROI cannot be the subtraction ROI.
Parameters: - aROI (ORSModel.ors.ROI) – the ROI to subtract (an ROI)
- pOutputROI (ORSModel.ors.ROI) – the output ROI (an ROI), see note below
Returns: output (ORSModel.ors.ROI) – the subtracted ROI
-
getSurface(self, timeStep: int) → float¶ Gets theROI’s surface area.
Note
The algorithm checks 6 neighbors for each voxel to determine surfaces. If a neighbor is empty, it means that the voxel’s side is a surface.
Parameters: timeStep (int) – step for which we want the surface Returns: output (float) – the total surface area (a double)
-
getSurfaceFromWeightedVoxelEstimation(self, timeStep: int, progressBar: ORSModel.ors.Progress) → float¶ Gets theROI’s surface area estimation of digital (weighted voxel estimation).
Note
The algorithm checks 8 vertices neighbors for each voxel to determine surfaces. If a neighbor is empty, it means that the voxel’s side is a surface. Then, a weight is given for each border voxel type. (Lindblad, J. (2005). Surface area estimation of digitized 3D objects using weighted local configurations. Image and Vision Computing, 23(2), 111-122.)
Parameters: - timeStep (int) – time step for which we want the surface
- progressBar (ORSModel.ors.Progress) – an optional progress object (a Progress)
Returns: output (float) – the total surface area (a double)
-
getTotalPerimeterOnPlane(self, cuttingPlane: ORSModel.ors.Plane, timeStep: int) → float¶ Gets theROI’s perimeter on a plane.
Parameters: - cuttingPlane (ORSModel.ors.Plane) – a cutting plane (an ORS plane)
- timeStep (int) – time step (int)
Returns: output (float) – the total ROI’s perimeter for the current plane (a double)
-
getTotalVoxelCount(self) → int¶ Gets the total number of voxels within theROI.
Returns: output (int) – the number of voxels in the ROI (a int64_t)
-
getUnionWithROI(self, aROI: ORSModel.ors.ROI, iTOffset: int, anOutputROI: ORSModel.ors.ROI) → ROI¶ Merges theROI with another ROI.
Note
If a target ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Note
The output ROI can be the same as the receiver ROI (i.e. can merge with another ROI into itself).
Note
It is assumed that both ROIs share the same characteristics (i.e. size, orientation, etc).
Parameters: - aROI (ORSModel.ors.ROI) – the ROI to merge with (an ROI)
- iTOffset (int) – the output ROI (an ROI), see note below
- anOutputROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.ROI) – the merged ROI
-
getVolume(self, timeStep: int) → float¶ Returns thecomputed volume of the region of interest.
Note
The volume is in cubic units of the dimension unit of the underlying channel.
Parameters: timeStep (int) – the time step (a uint32_t) Returns: output (float) – a double.
-
getVoxelCount(self, iTIndex: int) → int¶ Gets the number of voxels within theROI for a given T value.
Note
This method computes the number of indicies, so if you need the value several times try to cache its return value.
Parameters: iTIndex (int) – Returns: output (int) – the number of voxels in the ROI (a int64_t)
-
getVoxelsNeighborCountGreaterThanOrEqualTo(self, neighborCount: int, pProgress: ORSModel.ors.Progress) → ROI¶ Gets aROI containing the voxels having a neighbor count greater than or equal to n.
Parameters: - neighborCount (int) – the minimal neighbor count
- pProgress (ORSModel.ors.Progress) – an optional progress object (a Progress)
Returns: output (ORSModel.ors.ROI) –
-
getWillBeDisplayed(self) → bool¶ Gets whether or not theROI is destined to be displayed.
Note
Regions of interest are to be displayed by default.
Note
Regions of interest that will not be displayed use less memory and have less overhead.
Returns: output (bool) – true if the ROI will be displayed, false otherwise
-
classmethod
imread(files)¶ Loads a ROI from files
Parameters: files (file) [count=[0, None]] – fully qualified file name list Returns: outROI (ORSModel.ors.ROI) – the resulting ROI
-
classmethod
imreadDICOM(files)¶ Loads a ROI from files or folder contaning DICOM
Parameters: files (file) [count=[0, None]] – fully qualified file name list Returns: outROI (ORSModel.ors.ROI) – the resulting ROI
-
classmethod
imreadDICOMFolder(folder)¶ Loads a ROI from folder of DICOM files
Parameters: folder (folder) – fully qualified folder Returns: outROI (ORSModel.ors.ROI) – the resulting ROI
-
classmethod
imreadFolder(folder)¶ Loads a ROI from folder
Parameters: folder (folder) – fully qualified folder Returns: outROI (ORSModel.ors.ROI) – the resulting ROI
-
imsave(fileName, extension='tif', value=255)¶ Save a ROI to file in the type specified by the extension
Parameters: - fileName (file saving) – fully qualified file name
- extension (str) – image file format extension
- value (int) – value to put in the image at the ROI painted locations (should be between 0 and 255)
-
imwrite(fileName, extension='tif', value=255)¶ Save a ROI to file in the type specified by the extension
Parameters: - fileName (file saving) – fully qualified file name
- extension (str) – image file format extension
- value (int) – value to put in the image at the ROI painted locations (should be between 0 and 255)
-
iterateIntervals(self, callbackFunction: int, userdata: int, bForceSingleThread: bool, bAlignMultiThreadingToZ: bool, createMultiThreadDataFunction: int) → None¶ Iterates through theROI indicies, calling a callback function with index intervals.
Note
The last two arguments are ignored if second argument is true.
Note
The callback function (argument 1) is called with an interval of indicies beginning and end, with the range being inclusive. A third argument supplied is the result of calling callback function in argument 2. In the case of single-threaded execution, that argument is NULL. The callback function should return true to continue iterating, but can return false to interrupt the iterating.
Note
The second callback function (argument 4) is called at the start of each thread. It is intended for the caller to create user data that is in turn supplied to the callback function at each invocation. The arguments it receives is (number of threads being started, threadNumber), with threadNumber being zero based.
Parameters: - callbackFunction (int) – a callback function (the address of a ORSVOLUMEROIITERATORLINEAR function)
- userdata (bytes) – any user data to be supplied to the callback function
- bForceSingleThread (bool) – true to force single threaded execution, false to have it multi-threaded
- bAlignMultiThreadingToZ (bool) – true to align multi-thread execution to Z slices, false to align to nothing
- createMultiThreadDataFunction (int) – a callback function to create multithread data (the address of a ORSVOLUMEROIITERATORCREATETHREADDATA function)
-
iterateXYZTIntervals(self, callbackFunction: int, userdata: int, bForceSingleThread: bool, bAlignMultiThreadingToZ: bool, createMultiThreadDataFunction: int) → None¶ Iterates through theROI indicies, calling a callback function with X/Y/Z/T intervals.
Note
The last two arguments are ignored if second argument is true.
Note
The callback function (argument 1) is called with an interval of indicies beginning and end, with the range being inclusive. A third argument supplied is the result of calling callback function in argument 2. In the case of single-threaded execution, that argument is NULL. The callback function should return true to continue iterating, but can return false to interrupt the iterating.
Note
The second callback function (argument 4) is called at the start of each thread. It is intended for the caller to create user data that is in turn supplied to the callback function at each invocation. The arguments it receives is (number of threads being started, threadNumber), with threadNumber being zero based.
Parameters: - callbackFunction (int) – a callback function (the address of a ORSVOLUMEROIITERATORXYZT function)
- userdata (bytes) – any user data to be supplied to the callback function
- bForceSingleThread (bool) – true to force single threaded execution, false to have it multi-threaded
- bAlignMultiThreadingToZ (bool) – true to align multi-thread execution to Z slices, false to align to nothing
- createMultiThreadDataFunction (int) – a callback function to create multithread data (the address of a ORSVOLUMEROIITERATORCREATETHREADDATA function)
-
makeROIForChannel(self, pChannel: ORSModel.ors.Channel, x: int, y: int, z: int) → ROI¶ Makes a newROI from the receiver, according to a given channel’s coordinates.
Note
The supplied offset is the offset of the given channel relatively to the originating channel (the one the ROI is based upon), in voxels.
Parameters: - pChannel (ORSModel.ors.Channel) – a reference channel (an Channel)
- x (int) – an X offset (an short)
- y (int) – an Y offset (an short)
- z (int) – a Z offset (an short)
Returns: output (ORSModel.ors.ROI) – a new ROI (an ROI)
-
none()¶ ROI.__init__() -> ROI
-
paintBoxIntersectingChannel(self, pBox: ORSModel.ors.Box, label: float, tStep: int, intersectingChannel: ORSModel.ors.Channel, levelingMinRange: float, levelingMaxRange: float, pLUT: ORSModel.ors.LookupTable, intersectingChannelClipBox: ORSModel.ors.Box) → None¶ Parameters: - pBox (ORSModel.ors.Box) –
- label (float) –
- tStep (int) –
- intersectingChannel (ORSModel.ors.Channel) –
- levelingMinRange (float) –
- levelingMaxRange (float) –
- pLUT (ORSModel.ors.LookupTable) –
- intersectingChannelClipBox (ORSModel.ors.Box) –
-
paintBoxIntersectingMultiROI(self, pBox: ORSModel.ors.Box, label: float, tStep: int, intersectingMultiROI: ORSModel.ors.MultiROI, fHightlightOpacity: float, fHightlightOpacityOutRange: float, intersectingMultiROIClipBox: ORSModel.ors.Box) → None¶ Parameters: - pBox (ORSModel.ors.Box) –
- label (float) –
- tStep (int) –
- intersectingMultiROI (ORSModel.ors.MultiROI) –
- fHightlightOpacity (float) –
- fHightlightOpacityOutRange (float) –
- intersectingMultiROIClipBox (ORSModel.ors.Box) –
-
paintBoxIntersectingROI(self, pBox: ORSModel.ors.Box, label: float, tStep: int, intersectingROI: ORSModel.ors.ROI, intersectingROIClipBox: ORSModel.ors.Box) → None¶ Parameters: - pBox (ORSModel.ors.Box) –
- label (float) –
- tStep (int) –
- intersectingROI (ORSModel.ors.ROI) –
- intersectingROIClipBox (ORSModel.ors.Box) –
-
paintSphereIntersectingChannel(self, worldPos: ORSModel.ors.Vector3, fRadius: float, label: float, tStep: int, intersectingChannel: ORSModel.ors.Channel, levelingMinRange: float, levelingMaxRange: float, pLUT: ORSModel.ors.LookupTable, intersectingChannelClipBox: ORSModel.ors.Box) → None¶ Parameters: - worldPos (ORSModel.ors.Vector3) –
- fRadius (float) –
- label (float) –
- tStep (int) –
- intersectingChannel (ORSModel.ors.Channel) –
- levelingMinRange (float) –
- levelingMaxRange (float) –
- pLUT (ORSModel.ors.LookupTable) –
- intersectingChannelClipBox (ORSModel.ors.Box) –
-
paintSphereIntersectingMultiROI(self, worldPos: ORSModel.ors.Vector3, fRadius: float, label: float, tStep: int, intersectingMultiROI: ORSModel.ors.MultiROI, fHightlightOpacity: float, fHightlightOpacityOutRange: float, intersectingMultiROIClipBox: ORSModel.ors.Box) → None¶ Parameters: - worldPos (ORSModel.ors.Vector3) –
- fRadius (float) –
- label (float) –
- tStep (int) –
- intersectingMultiROI (ORSModel.ors.MultiROI) –
- fHightlightOpacity (float) –
- fHightlightOpacityOutRange (float) –
- intersectingMultiROIClipBox (ORSModel.ors.Box) –
-
paintSphereIntersectingROI(self, worldPos: ORSModel.ors.Vector3, fRadius: float, label: float, tStep: int, intersectingROI: ORSModel.ors.ROI, intersectingROIClipBox: ORSModel.ors.Box) → None¶ Parameters: - worldPos (ORSModel.ors.Vector3) –
- fRadius (float) –
- label (float) –
- tStep (int) –
- intersectingROI (ORSModel.ors.ROI) –
- intersectingROIClipBox (ORSModel.ors.Box) –
-
removeAllVoxelsIfInRange(self, timeStep: int, minValue: float, maxValue: float, pChannel: ORSModel.ors.Channel) → None¶ Parameters: - timeStep (int) –
- minValue (float) –
- maxValue (float) –
- pChannel (ORSModel.ors.Channel) –
-
removeAllVoxelsIfNotInRange(self, timeStep: int, minValue: float, maxValue: float, pChannel: ORSModel.ors.Channel) → None¶ Parameters: - timeStep (int) –
- minValue (float) –
- maxValue (float) –
- pChannel (ORSModel.ors.Channel) –
-
removeCircleArea(self, posX: float, posY: float, posZ: float, normalX: float, normalY: float, normalZ: float, radius: float, tStep: int) → None¶ Remove circle area fromROI.
Parameters: - posX (float) –
- posY (float) –
- posZ (float) –
- normalX (float) –
- normalY (float) –
- normalZ (float) –
- radius (float) –
- tStep (int) –
-
removeLine(self, pLine: ORSModel.ors.Line, tStep: int) → None¶ Removes a line from theROI.
Parameters: - pLine (ORSModel.ors.Line) – the line to remove (an Line)
- tStep (int) – the time step (a uint32_t)
-
removeLineIfInRange(self, pLine: ORSModel.ors.Line, tStep: int, lowerThreshold: float, upperThreshold: float, pChannel: ORSModel.ors.Channel) → None¶ Removes a line from theROI if the corresponding voxels in the channel are within the specified range.
Note
Note that the range values are inclusive.
Parameters: - pLine (ORSModel.ors.Line) – the line to remove (an Line)
- tStep (int) – the time step (a uint32_t)
- lowerThreshold (float) – the lower range value (a double)
- upperThreshold (float) – the upper range value (a double)
- pChannel (ORSModel.ors.Channel) – a channel of the same shape as the receiver (an Channel)
-
removeLineSegment(self, lineSegment: ORSModel.ors.LineSegment, tStep: int) → None¶ Removes a line segment from theROI.
Parameters: - lineSegment (ORSModel.ors.LineSegment) – the line segment to remove (an Line)
- tStep (int) – the time step (a uint32_t)
-
removeLineSegmentIfInRange(self, lineSegment: ORSModel.ors.LineSegment, tStep: int, lowerThreshold: float, upperThreshold: float, pChannel: ORSModel.ors.Channel) → None¶ Removes a line segment from theROI if the corresponding voxels in the channel are within the specified range.
Note
Note that the range values are inclusive.
Parameters: - lineSegment (ORSModel.ors.LineSegment) – the line segment to remove (an LineSegment)
- tStep (int) – the time step (a uint32_t)
- lowerThreshold (float) – the lower range value (a double)
- upperThreshold (float) – the upper range value (a double)
- pChannel (ORSModel.ors.Channel) – a channel of the same shape as the receiver (an Channel)
-
removeROI(self, aROI: ORSModel.ors.ROI) → None¶ Parameters: aROI (ORSModel.ors.ROI) –
-
removeSimplePointsWithDistanceMap(self, seedPointROI: ORSModel.ors.ROI, spaceChannel: ORSModel.ors.Channel, outputROI: ORSModel.ors.ROI) → ROI¶ Parameters: - seedPointROI (ORSModel.ors.ROI) –
- spaceChannel (ORSModel.ors.Channel) –
- outputROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.ROI) –
-
removeVoxel(self, index: int) → None¶ Removes a voxel.
Note
The index is linear within the channel data.
Note
Any changes to a Region of Interest need to be followed by a show() to refresh the screen.
Parameters: index (int) – the index of the voxel (a int64_t)
-
removeVoxelIndicesFromROIIfInRange(self, indices: int, indicesSize: int, lowerThreshold: float, upperThreshold: float, pChannel: ORSModel.ors.Channel) → None¶ Removes indices from theROI, checking against a range.
Note
Only those indicies having values within the supplied range are removed from the ROI.
Parameters: - indices (int) – an array of indices (a int64_t*)
- indicesSize (int) – the number of indices in the array (a int64_t)
- lowerThreshold (float) – the lower range (a double)
- upperThreshold (float) – the upper range (a double)
- pChannel (ORSModel.ors.Channel) – the channel to check against (an Channel)
-
removeVoxelInterval(self, iStart: int, iEnd: int) → None¶ Removes a voxel interval of indicies.
Note
Every voxel within the interval will be removed from the Region of Interest.
Note
The indicies are linear within the channel data.
Note
Any changes to a Region of Interest need to be followed by a show() to refresh the screen.
Parameters: - iStart (int) – the start value (inclusive) of the interval (a int64_t)
- iEnd (int) – the end value (inclusive) of the interval (a int64_t)
-
removeVoxelIntervals(self, pIntervalArray: int, pNumberOfIntervals: int) → None¶ Removes a list of voxel indicies intervals.
Note
Every voxel within the interval will be removed from the Region of Interest.
Note
The indicies are linear within the channel data.
Note
Any changes to a Region of Interest need to be followed by a show() to refresh the screen.
Parameters: - pIntervalArray (int) – an array of interval begin and end (inclusive) values (a int64_t*)
- pNumberOfIntervals (int) – the number of interval pairs in the array (a int32_t*)
-
removeVoxels(self, indices: int, indicesSize: int) → None¶ Removes a list of voxels.
Note
The indicies are linear within the channel data.
Note
Any changes to a Region of Interest need to be followed by a show() to refresh the screen.
Parameters: - indices (int) – an array of indicies (a int64_t*)
- indicesSize (int) – the number of indicies in the array (a int64_t)
-
removeVoxelsFromWorldCoordinates(self, worldPositionArray: ORSModel.ors.ArrayDouble, timeIndex: int) → None¶ Removes indices (supplied in the form of world coordinates) from theROI.
Parameters: - worldPositionArray (ORSModel.ors.ArrayDouble) – an array of world position triplets (an ArrayDouble)
- timeIndex (int) – the T index (a uint32_t)
-
removeVoxelsFromWorldCoordinatesIfInRange(self, worldPositionArray: ORSModel.ors.ArrayDouble, timeIndex: int, lowerThreshold: float, upperThreshold: float, pChannel: ORSModel.ors.Channel) → None¶ Removes indices (supplied in the form of world coordinates) from theROI, checking against a range.
Note
Very similar to removeVoxelsFromWorldCoordinates(), but only those indicies having values within the supplied range are removed from the ROI.
Parameters: - worldPositionArray (ORSModel.ors.ArrayDouble) – an array of world position triplets (an ArrayDouble)
- timeIndex (int) – the T index (a uint32_t)
- lowerThreshold (float) – the lower range (a double)
- upperThreshold (float) – the upper range (a double)
- pChannel (ORSModel.ors.Channel) – the channel to check against (an Channel)
-
reverseTimeStepRange(self, pTimeStepStart: int, pTimeStepEnd: int) → None¶ Reverses a time step range of theROI.
Parameters: - pTimeStepStart (int) – the time step start (a uint32_t)
- pTimeStepEnd (int) – the time step end (a uint32_t)
-
setInitialColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the initialROI color.
Note
The color is expressed in RGB fashion.
Parameters: IColor (ORSModel.ors.Color) – a color (an Color)
-
setLabel(self, aLabel: int) → None¶ Sets theROI label.
Note
A ROI label is an unsigned short value that can be associated to the ROI. Each ROI has one label.
Parameters: aLabel (int) – a label (a uint16_t)
-
setShowContour(self, pFlag: bool) → None¶ Parameters: pFlag (bool) –
-
setShowContourCubic(self, pFlag: bool) → None¶ Parameters: pFlag (bool) –
-
setShowContourInterpolated(self, pFlag: bool) → None¶ Parameters: pFlag (bool) –
-
setWillBeDisplayed(self, value: bool) → None¶ Indicates whether or not theROI is destined to be displayed.
Note
Regions of interest are to be displayed by default.
Note
Regions of interest that will not be displayed use less memory and have less overhead.
Parameters: value (bool) – true if the ROI will be displayed, false otherwise
-
updateUndo()¶
-
ROIAnalyzer¶
-
class
ORSModel.ors.ROIAnalyzer¶ Bases:
ORSModel.ors.Unmanagedbrief_description: Analyzer for ROIs. author: Nicolas Piché. All other members of ORS participated. version: 1.0 date: May 2010
-
geVolumeWasComputed(self) → bool¶ Returns: output (bool) –
-
getCenterOfMass(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getCenterOfMassWasComputed(self) → bool¶ Returns: output (bool) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getInertiaTensorPrincipalComponent(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getInertiaTensorPrincipalComponentWasComputed(self) → bool¶ Returns: output (bool) –
-
getLongestDistance(self) → float¶ Returns: output (float) –
-
getLongestDistanceWasComputed(self) → bool¶ Returns: output (bool) –
-
getLongestLineSegment(self) → LineSegment¶ Returns: output (ORSModel.ors.LineSegment) –
-
getLongestSegmentWasComputed(self) → bool¶ Returns: output (bool) –
-
getMax(self) → float¶ Returns: output (float) –
-
getMaxInPhysicalUnits(self) → float¶ Returns: output (float) –
-
getMean(self) → float¶ Returns: output (float) –
-
getMeanInPhysicalUnits(self) → float¶ Returns: output (float) –
-
getMeanWasComputed(self) → bool¶ Returns: output (bool) –
-
getMin(self) → float¶ Returns: output (float) –
-
getMinInPhysicalUnits(self) → float¶ Returns: output (float) –
-
getMinMaxWasComputed(self) → bool¶ Returns: output (bool) –
-
getStandardDeviation(self) → float¶ Returns: output (float) –
-
getStandardDeviationInPhysicalUnits(self) → float¶ Returns: output (float) –
-
getStandardDeviationWasComputed(self) → bool¶ Returns: output (bool) –
-
getSurfaceArea(self) → float¶ Returns: output (float) –
-
getSurfaceAreaInPhysicalUnits(self) → float¶ Returns: output (float) –
-
getSurfaceAreaWasComputed(self) → bool¶ Returns: output (bool) –
-
getTimeStep(self) → int¶ Returns: output (int) –
-
getVoxelCount(self) → int¶ Returns: output (int) –
-
none()¶ ROIAnalyzer.__init__() -> ROIAnalyzer
-
Rectangle¶
-
class
ORSModel.ors.Rectangle¶ Bases:
ORSModel.ors.Shape2Dbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2010
-
atomicLoad(self, aFilename: str) → None¶ Loads an object from a file.
Note
Objects are saved in XML format.
Note
The file should contain only one object. If it contains more than one object, use atomicLoadSpecificNode().
Parameters: aFilename (str) – a file path (a string)
-
atomicSave(self, aFilename: str) → int¶ Saves the object to a file.
Note
Objects are saved in XML format.
Note
The file will be overwritten if it exists.
Parameters: aFilename (str) – a file path (a string) Returns: output (int) – a result code (an int32_t, 0 if successful otherwise an error code)
-
copy(self) → Rectangle¶ Gets a copy of the receiver.
Returns: output (ORSModel.ors.Rectangle) – a box (an Rectangle)
-
createFromPythonRepresentation(aPythonRepresentation: str) → Rectangle¶ Create aRectangle object from a Python string representation a static method.
Parameters: aPythonRepresentation (str) – a Python evaluable string representation (a str) Returns: output (ORSModel.ors.Rectangle) – a bounded plane (a Rectangle)
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ Create aRectangle object from a Python string representation.
Parameters: aPythonRepresentation (str) – a Python evaluable string representation (a str) Returns: output (bool) – true if parsing worked, else false (a bool)
-
getArea(self) → float¶ Gets the area of the receiver.
Returns: output (float) – an area (a double)
-
getBoundedDoublePlaneInBoxReferential(self, inRefBox: ORSModel.ors.Box) → Rectangle¶ Gets a copy of the receiver in the argument referential.
Parameters: inRefBox (ORSModel.ors.Box) – a box, the destination referential (an Box) Returns: output (ORSModel.ors.Rectangle) – a bounded plane, a copy of the receiver in the argument referential (an Rectangle)
-
getBox(self, direction2Size: float) → Box¶ Returns a box, with direction2 size provided by the argument, with the same origin as the receiver.
Parameters: direction2Size (float) – Returns: output (ORSModel.ors.Box) – a box (an Box)
-
getCenter(self) → Vector3¶ Gets the geometrical middle of the bounded plane.
Returns: output (ORSModel.ors.Vector3) – a bounded plane center position (an Vector3)
-
getCenterHalfVoxel(self) → Vector3¶ Gets the middle of the voxel in the middle of the box.
Returns: output (ORSModel.ors.Vector3) – a box center position (an Vector3)
-
getCenteredBox(self, direction2Size: float) → Box¶ Returns a box, with direction2 size provided by the argument, with origin displaced as to have the receiver centered in the direction2 vector.
Parameters: direction2Size (float) – Returns: output (ORSModel.ors.Box) – a centered box (an Box)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getDirection(self, index: int) → Vector3¶ Gets a bounded plane direction.
Note
The direction2 vector is normalized and automaticaly generated using the cross product of direction0 vector and direction1 vector.
Parameters: index (int) – the side index (a uint16_t) Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirection0(self) → Vector3¶ Gets the bounded plane direction0.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirection0Size(self) → float¶ Gets the bounded plane direction0 vector length.
Note
This is the size in meters of the bounded plane side 0.
Returns: output (float) – the side 0 length (a double)
-
getDirection0SizeInVoxel(self) → float¶ Gets the direction0 size in voxels.
Returns: output (float) – the size in voxels (a double)
-
getDirection0Spacing(self) → float¶ Gets the receiver direction0 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Returns: output (float) – the side 0 spacing (a double)
-
getDirection1(self) → Vector3¶ Gets the bounded plane direction1.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirection1Size(self) → float¶ Gets the bounded plane direction1 vector length.
Note
This is the size in meters of the bounded plane side 1.
Returns: output (float) – the side 1 length (a double)
-
getDirection1SizeInVoxel(self) → float¶ Gets the direction1 size in voxels.
Returns: output (float) – the size in voxels (a double)
-
getDirection1Spacing(self) → float¶ Gets the receiver direction1 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Returns: output (float) – the side 1 spacing (a double)
-
getDirection2(self) → Vector3¶ Gets the bounded plane direction2.
Note
The direction2 vector is normalized and automaticaly generated using the cross product of direction0 vector and direction1 vector.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirectionSize(self, index: int) → float¶ Gets a bounded plane direction vector length.
Note
This is the size in meters of the bounded plane side.
Parameters: index (int) – the side index (a uint16_t) Returns: output (float) – the side length (a double)
-
getDirectionSizeVector(self) → Vector3¶ Gets the direction size as a vector.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDirectionSpacing(self, index: int) → float¶ Gets a receiver spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Parameters: index (int) – the side index (a uint16_t) Returns: output (float) – the side spacing (a double)
-
getDirectionSpacingVector(self) → Vector3¶ Gets the direction spacing as a vector.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getDistanceFromPoint(self, point: ORSModel.ors.Vector3) → float¶ Computes the distance from a point.
Parameters: point (ORSModel.ors.Vector3) – a point (an Vector3) Returns: output (float) – the distance (a double)
-
getIndex(self) → float¶ Returns: output (float) –
-
getIntersectionWithPlane(self, pPlane: ORSModel.ors.Plane) → LineSegment¶ Returns the line segment representing the intersection of the provided plane and the receiver.
Note
Returns NULL if there is no intersection.
Parameters: pPlane (ORSModel.ors.Plane) – a plane (a Plane) Returns: output (ORSModel.ors.LineSegment) – a line segment (an LineSegment)
-
getInvertedWorldTranformation(self) → Matrix4x4¶ The getWorldTransform matrix cannot be directly inverted. Use this call to retrieve the inverse transform.
Returns: output (ORSModel.ors.Matrix4x4) – a transformation matrix (an Matrix4x4)
-
getIsEqualTo(self, aBplane: ORSModel.ors.Rectangle) → bool¶ Parameters: aBplane (ORSModel.ors.Rectangle) – Returns: output (bool) –
-
getLinearInterpolatedBoundedPlane(self, aPlane: ORSModel.ors.Rectangle, normalizedInterpolationFactor: float) → Rectangle¶ Returns a bounded plane which is the linear interpolation of the receiver and the provided bounded plane.
Parameters: - aPlane (ORSModel.ors.Rectangle) – a bounded plane (an Rectangle)
- normalizedInterpolationFactor (float) – an interpolation factor [0.0 , 1.0] plane (a double)
Returns: output (ORSModel.ors.Rectangle) – an interpolated bounded plane (an Rectangle)
-
getNormal(self) → Vector3¶ Returns the normal of theRectangle.
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getOrigin(self) → Vector3¶ Gets the bounded plane origin position.
Note
The origin is in world coordinates.
Returns: output (ORSModel.ors.Vector3) – the origin (an Vector3)
-
getOriginOpposite(self) → Vector3¶ Gets the bounded plane origin opposite position.
Note
The origin opposite is in world coordinates.
Returns: output (ORSModel.ors.Vector3) – the origin opposite (an Vector3)
-
getPlane(self) → Plane¶ Returns the plane on which the bounded plane resides.
Returns: output (ORSModel.ors.Plane) – a plane (an Plane)
-
getProjectionOnPlane(self, aPoint: ORSModel.ors.Vector3) → Vector3¶ Returns a point which is the argument projected on the plane described by the receiver.
Parameters: aPoint (ORSModel.ors.Vector3) – a point to project (an Vector3) Returns: output (ORSModel.ors.Vector3) – the projected point (an Vector3)
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getSpacingInDirection(self, aDirection: ORSModel.ors.Vector3) → float¶ Gets the spacing in the specified direction.
Parameters: aDirection (ORSModel.ors.Vector3) – the direction vector (an Vector3) Returns: output (float) – the spacing (a double)
-
getSummit(self, maxDirection0: bool, maxDirection1: bool) → Vector3¶ Gets the position of one of the summits of the bounded plane.
Parameters: - maxDirection0 (bool) – TRUE to get maxDirection0, FALSE to get minDirection0
- maxDirection1 (bool) – TRUE to get maxDirection1, FALSE to get minDirection1
Returns: output (ORSModel.ors.Vector3) – a summit position (an Vector3)
-
getTransformed(self, aMatrix: ORSModel.ors.Matrix4x4) → Rectangle¶ Parameters: aMatrix (ORSModel.ors.Matrix4x4) – Returns: output (ORSModel.ors.Rectangle) –
-
getVoxelToWorldCoordinates(self, anIndex: ORSModel.ors.Vector3) → Vector3¶ Gets the position of a given voxel.
Note
Only useful if the spacing of the direction vectors have been defined.
Parameters: anIndex (ORSModel.ors.Vector3) – a voxel position (an Vector3) Returns: output (ORSModel.ors.Vector3) – the position in world coordinates (an Vector3)
-
getWorldToVoxelCoordinates(self, pPointInWorld: ORSModel.ors.Vector3) → Vector3¶ Gets the position of a given world coordinate.
Note
Only useful if the spacing of the direction vectors have been defined.
Parameters: pPointInWorld (ORSModel.ors.Vector3) – a world coordinate position point (an Vector3) Returns: output (ORSModel.ors.Vector3) – the position in local coordinates (an Vector3)
-
getWorldTranformation(self) → Matrix4x4¶ Returns: output (ORSModel.ors.Matrix4x4) –
-
growToIncludePoint(self, aPoint: ORSModel.ors.Vector3) → None¶ Grows the receiver as to include the provided point.
Note
The provided point is projected on the bounded plane.
Parameters: aPoint (ORSModel.ors.Vector3) –
-
none()¶ Rectangle.__init__() -> Rectangle
-
setDirection(self, index: int, pVect: ORSModel.ors.Vector3) → None¶ Sets a bounded plane direction.
Note
The direction vector will be normalized.
Parameters: - index (int) – the side index (a uint16_t)
- pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setDirection0(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the bounded plane direction0.
Note
The direction0 vector will be normalized.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setDirection0Size(self, aSize: float) → None¶ Sets the bounded plane direction0 vector length.
Note
This is the size in meters of the bounded plane side 0.
Parameters: aSize (float) – the side 0 length (a double)
-
setDirection0Spacing(self, aSpacing: float) → None¶ Sets the receiver direction0 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Parameters: aSpacing (float) – the side 0 spacing (a double)
-
setDirection1(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the bounded plane direction1.
Note
The direction1 vector will be normalized.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setDirection1Size(self, aSize: float) → None¶ Sets the bounded plane direction1 vector length.
Note
This is the size in meters of the bounded plane side 1.
Parameters: aSize (float) – the side 1 length (a double)
-
setDirection1Spacing(self, aSpacing: float) → None¶ Sets the receiver direction1 spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Parameters: aSpacing (float) – the side 1 spacing (a double)
-
setDirectionSize(self, index: int, aSize: float) → None¶ Sets a bounded plane direction vector length.
Note
This is the size in meters of the bounded plane side.
Parameters: - index (int) – the side index (a uint16_t)
- aSize (float) – the side length (a double)
-
setDirectionSizeVector(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the direction size as a vector.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setDirectionSpacing(self, index: int, aSpacing: float) → None¶ Sets a receiver direction spacing.
Note
This value is used to compute transformations from world coordinate space to index space (in the channels).
Parameters: - index (int) – the side index (a uint16_t)
- aSpacing (float) – the side spacing (a double)
-
setDirectionSpacingVector(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the direction spacing as a vector.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setOrigin(self, pVect: ORSModel.ors.Vector3) → None¶ Sets the receiver origin position.
Note
The origin should be in world coordinates.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3)
-
ReferenceFrame¶
-
class
ORSModel.ors.ReferenceFrame¶ Bases:
ORSModel.ors.Nodebrief_description: Used to represent a referential. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: Visual Used to represent different referentials (transformation matricies). A frame or any visual ORS object can be attached to a frame to be in a different referential. Visuals attached to a frame can be rotated, scaled, and/or translated. A referential is in reality a 4D transformation matrix that represents a scale, a rotation and a translation in the parent referential (or the world).
-
addLocalTranslation(self, pTranslation: ORSModel.ors.Vector3, pTimeStep: int) → None¶ Moves the frame by the specified offsets.
Parameters: - pTranslation (ORSModel.ors.Vector3) – a translation vector (an Vector3)
- pTimeStep (int) – the time step (a uint32_t)
-
addLocalTranslationForAllTimeStep(self, pTranslation: ORSModel.ors.Vector3) → None¶ Moves the frame by the specified offsets.
Parameters: pTranslation (ORSModel.ors.Vector3) – a translation vector (an Vector3)
-
addRotation(self, pRotation: ORSModel.ors.Vector3, angle: float, pTimeStep: int) → None¶ Adds a rotation to the frame referential.
Note
The rotation is along the specified vector, in the parent referential.
Note
Rotations are cumulative.
Parameters: - pRotation (ORSModel.ors.Vector3) – the rotation vector (an Vector3)
- angle (float) – angle (a float)
- pTimeStep (int) – the time step (a uint32_t)
-
addRotationAroundPoint(self, fromNode: ORSModel.ors.Node, axis: ORSModel.ors.Vector3, centerOfRotation: ORSModel.ors.Vector3, angle: float, pTimeStep: int) → None¶ Parameters: - fromNode (ORSModel.ors.Node) –
- axis (ORSModel.ors.Vector3) –
- centerOfRotation (ORSModel.ors.Vector3) –
- angle (float) –
- pTimeStep (int) –
-
addRotationAroundPointForAllTimeStep(self, fromNode: ORSModel.ors.Node, axis: ORSModel.ors.Vector3, centerOfRotation: ORSModel.ors.Vector3, angle: float) → None¶ Parameters: - fromNode (ORSModel.ors.Node) –
- axis (ORSModel.ors.Vector3) –
- centerOfRotation (ORSModel.ors.Vector3) –
- angle (float) –
-
addRotationForAllTimeStep(self, pRotation: ORSModel.ors.Vector3, angle: float) → None¶ Parameters: - pRotation (ORSModel.ors.Vector3) –
- angle (float) –
-
addScaling(self, pScale: ORSModel.ors.Vector3, pTimeStep: int) → None¶ Parameters: - pScale (ORSModel.ors.Vector3) –
- pTimeStep (int) –
-
addScalingAtPoint(self, pScale: ORSModel.ors.Vector3, pPoint: ORSModel.ors.Vector3, pTimeStep: int) → None¶ Parameters: - pScale (ORSModel.ors.Vector3) –
- pPoint (ORSModel.ors.Vector3) –
- pTimeStep (int) –
-
addScalingAtPointForAllTimeStep(self, pScale: ORSModel.ors.Vector3, pPoint: ORSModel.ors.Vector3) → None¶ Parameters: - pScale (ORSModel.ors.Vector3) –
- pPoint (ORSModel.ors.Vector3) –
-
addScalingForAllTimeStep(self, pScale: ORSModel.ors.Vector3) → None¶ Parameters: pScale (ORSModel.ors.Vector3) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getLocalPosition(self, pTimeStep: int) → Vector3¶ Gets the frame translation (a vector) from the local parent referential.
Note
The resulting translation is the frame position in the parent referential.
Parameters: pTimeStep (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getMatrix(self, pTimeStep: int) → Matrix4x4¶ Gets the frame matrix.
Parameters: pTimeStep (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.Matrix4x4) – a matrix (an Matrix4x4)
-
getParentFrame(self) → ReferenceFrame¶ Gets the first parent referential.
Returns: output (ORSModel.ors.ReferenceFrame) – a frame (an ReferenceFrame) if one exists, NULL otherwise
-
getPosition(self, aNode: ORSModel.ors.Node, pTimeStep: int) → Vector3¶ Gets the frame translation (a vector) directly from the world referential.
Note
The resulting translation is the frame position in the world referential.
Parameters: - aNode (ORSModel.ors.Node) –
- pTimeStep (int) –
Returns: output (ORSModel.ors.Vector3) – a vector (an Vector3)
-
getTSize(self) → int¶ Returns: output (int) –
-
getTransformationFromNodeToThis(self, fromNode: ORSModel.ors.Node, inputOutMatrix: ORSModel.ors.Matrix4x4, pTimeStep: int) → Matrix4x4¶ Parameters: - fromNode (ORSModel.ors.Node) –
- inputOutMatrix (ORSModel.ors.Matrix4x4) –
- pTimeStep (int) –
Returns: output (ORSModel.ors.Matrix4x4) –
-
getXScale(self, pTimeStep: int) → float¶ Gets the X scale of the frame in the parent referential.
Parameters: pTimeStep (int) – the time step (a uint32_t) Returns: output (float) – a scale (a double)
-
getYScale(self, pTimeStep: int) → float¶ Gets the Y scale of the frame in the parent referential.
Parameters: pTimeStep (int) – the time step (a uint32_t) Returns: output (float) – a scale (a double)
-
getZScale(self, pTimeStep: int) → float¶ Gets the Z scale of the frame in the parent referential.
Parameters: pTimeStep (int) – the time step (a uint32_t) Returns: output (float) – a scale (a double)
-
none()¶ ReferenceFrame.__init__() -> ReferenceFrame
-
reset(self, pTimeStep: int) → None¶ Resets the frame.
Note
Resetting a frame moves it to 0,0,0, and resets its scale, rotation and tranlation.
Parameters: pTimeStep (int) – the time step (a uint32_t)
-
resetForAllTimeStep(self) → None¶ Resets the frame.
Note
Resetting a frame moves it to 0,0,0, and resets its scale, rotation and tranlation.
-
resetFromBox(self, anIBox: ORSModel.ors.Box, pTimeStep: int) → None¶ Resets the frame to a box’s referential.
Parameters: - anIBox (ORSModel.ors.Box) – a box (an Box)
- pTimeStep (int) – the time step (a uint32_t)
-
resetFromBoxForAllTimeStep(self, anIBox: ORSModel.ors.Box) → None¶ Resets the frame to a box’s referential.
Parameters: anIBox (ORSModel.ors.Box) – a box (an Box)
-
setLocalPosition(self, aIVector: ORSModel.ors.Vector3, pTimeStep: int) → None¶ Sets the frame translation from a vector in the local parent referential.
Note
The resulting translation is the frame position in the parent referential.
Parameters: - aIVector (ORSModel.ors.Vector3) – a vector (an Vector3)
- pTimeStep (int) – the time step (a uint32_t)
-
setLocalPositionForAllTimeStep(self, aIVector: ORSModel.ors.Vector3) → None¶ Sets the frame translation from a vector in the local parent referential.
Note
The resulting translation is the frame position in the parent referential.
Parameters: aIVector (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setLocalRotationMatrix(self, pMatrix: ORSModel.ors.Matrix4x4, pTimeStep: int) → None¶ Parameters: - pMatrix (ORSModel.ors.Matrix4x4) –
- pTimeStep (int) –
-
setMatrix(self, pMatrix: ORSModel.ors.Matrix4x4, pTimeStep: int) → None¶ Sets the frame matrix.
Parameters: - pMatrix (ORSModel.ors.Matrix4x4) – the matrix (an Matrix4x4)
- pTimeStep (int) – the time step (a uint32_t)
-
setMatrixForAllTimeStep(self, pMatrix: ORSModel.ors.Matrix4x4) → None¶ Sets the frame matrix.
Parameters: pMatrix (ORSModel.ors.Matrix4x4) – the matrix (an Matrix4x4)
-
setOrientationCosine(self, fromNode: ORSModel.ors.Node, direction0Cosine: ORSModel.ors.Vector3, direction1Cosine: ORSModel.ors.Vector3, direction2Cosine: ORSModel.ors.Vector3, pTimeStep: int) → None¶ Parameters: - fromNode (ORSModel.ors.Node) –
- direction0Cosine (ORSModel.ors.Vector3) –
- direction1Cosine (ORSModel.ors.Vector3) –
- direction2Cosine (ORSModel.ors.Vector3) –
- pTimeStep (int) –
-
setOrientationCosineForAllTimeStep(self, fromNode: ORSModel.ors.Node, direction0Cosine: ORSModel.ors.Vector3, direction1Cosine: ORSModel.ors.Vector3, direction2Cosine: ORSModel.ors.Vector3) → None¶ Parameters: - fromNode (ORSModel.ors.Node) –
- direction0Cosine (ORSModel.ors.Vector3) –
- direction1Cosine (ORSModel.ors.Vector3) –
- direction2Cosine (ORSModel.ors.Vector3) –
-
setPosition(self, aNode: ORSModel.ors.Node, aIVector: ORSModel.ors.Vector3, pTimeStep: int) → None¶ Sets the frame translation from a vector directly in the world referential.
Note
The resulting translation of the frame takes into account all parent referentials.
Parameters: - aNode (ORSModel.ors.Node) – a node (a Node)
- aIVector (ORSModel.ors.Vector3) – a vector (an Vector3)
- pTimeStep (int) – the time step (a uint32_t)
-
setPositionForAllTimeStep(self, aNode: ORSModel.ors.Node, aIVector: ORSModel.ors.Vector3) → None¶ Sets the frame translation from a vector directly in the world referential.
Note
The resulting translation of the frame takes into account all parent referentials.
Parameters: - aNode (ORSModel.ors.Node) – a node (a Node)
- aIVector (ORSModel.ors.Vector3) – a vector (an Vector3)
-
setTSize(self, pTSize: int) → None¶ Parameters: pTSize (int) –
-
setXScale(self, xScale: float, pTimeStep: int) → None¶ Sets the X scale of the frame in the parent referential.
Parameters: - xScale (float) – a scale (a double)
- pTimeStep (int) – the time step (a uint32_t)
-
setXScaleForAllTimeStep(self, xScale: float) → None¶ Sets the X scale of the frame in the parent referential.
Parameters: xScale (float) – a scale (a double)
-
setYScale(self, yScale: float, pTimeStep: int) → None¶ Sets the Y scale of the frame in the parent referential.
Parameters: - yScale (float) – a scale (a double)
- pTimeStep (int) – the time step (a uint32_t)
-
setYScaleForAllTimeStep(self, yScale: float) → None¶ Sets the Y scale of the frame in the parent referential.
Parameters: yScale (float) – a scale (a double)
-
setZScale(self, zScale: float, pTimeStep: int) → None¶ Sets the Z scale of the frame in the parent referential.
Parameters: - zScale (float) – a scale (a double)
- pTimeStep (int) – the time step (a uint32_t)
-
setZScaleForAllTimeStep(self, zScale: float) → None¶ Sets the Z scale of the frame in the parent referential.
Parameters: zScale (float) – a scale (a double)
-
RenderingEffect¶
-
class
ORSModel.ors.RenderingEffect¶ Bases:
ORSModel.ors.Node-
addApplicableClassName(self, sClassName: str) → None¶ Parameters: sClassName (str) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getEffectIndex(self) → int¶ Returns: output (int) –
-
getID(self) → str¶ Returns: output (str) –
-
getIsApplicableToVisual(self, visual: ORSModel.ors.Visual) → bool¶ Parameters: visual (ORSModel.ors.Visual) – Returns: output (bool) –
-
getIsEnabledForView(self, view: ORSModel.ors.View) → bool¶ Parameters: view (ORSModel.ors.View) – Returns: output (bool) –
-
getIsGPUIntensive(self) → bool¶ Get if the effect is GPU intensive.
Returns: output (bool) –
-
getShaderCodeForView(self, aView: ORSModel.ors.View, raycastElementId: int, outputElementId: int) → str¶ get the evaluated shader code (in glsl)
Parameters: - aView (ORSModel.ors.View) – the view (a ors::view)
- raycastElementId (int) – raycastElementId: the index of the raycasted element being rendered (volumeN_, volumestructN_, transferFuncN_, rayN)
- outputElementId (int) – outputElementId: the index of colors[] output register (rgba)
Returns: output (str) –
-
getShaderVariableCount(self) → int¶ Get the total variables count.
Returns: output (int) –
-
getShaderVariableDoubleCount(self) → int¶ Get the total double variables count.
Returns: output (int) –
-
getShaderVariableDoubleForAll(self, variableName: str) → float¶ Get the value of a double variable for all views.
Parameters: variableName (str) – Returns: output (float) –
-
getShaderVariableDoubleForView(self, view: ORSModel.ors.View, variableName: str) → float¶ Get a shader variable of type double that applies to a specific view.
Parameters: - view (ORSModel.ors.View) –
- variableName (str) –
Returns: output (float) –
-
getShaderVariableDoubleNameAtIndex(self, iIndex: int) → str¶ Parameters: iIndex (int) – Returns: output (str) –
-
getShaderVariableLUTCount(self) → int¶ Get the total double variables count.
Returns: output (int) –
-
getShaderVariableLUTForAll(self, variableName: str) → LookupTable¶ Get the value of a LUT variable for all views.
Parameters: variableName (str) – Returns: output (ORSModel.ors.LookupTable) –
-
getShaderVariableLUTForView(self, view: ORSModel.ors.View, variableName: str) → LookupTable¶ Gets a shader variable of type LUT that applies to a specific view.
Parameters: - view (ORSModel.ors.View) –
- variableName (str) –
Returns: output (ORSModel.ors.LookupTable) –
-
getShaderVariableLUTNameAtIndex(self, iIndex: int) → str¶ Parameters: iIndex (int) – Returns: output (str) –
-
none()¶ RenderingEffect.__init__() -> RenderingEffect
-
setEffectIndex(self, iValue: int) → None¶ Parameters: iValue (int) –
-
setID(self, sId: str) → None¶ Parameters: sId (str) –
-
setIsEnabledForView(self, view: ORSModel.ors.View, bState: bool) → None¶ Parameters: - view (ORSModel.ors.View) –
- bState (bool) –
-
setIsGPUIntensive(self, bValue: bool) → None¶ Set if the effect is GPU intensive.
Parameters: bValue (bool) –
-
setShaderCode(self, code: str) → None¶ setShaderCode
Parameters: code (str) –
-
setShaderVariableDoubleForAll(self, variableName: str, aValue: float) → None¶ Set a shader variable of type double that applies to all views.
Parameters: - variableName (str) –
- aValue (float) –
-
setShaderVariableDoubleForView(self, view: ORSModel.ors.View, variableName: str, aValue: float) → None¶ Set a shader variable of type double that applies to a specific view.
Parameters: - view (ORSModel.ors.View) –
- variableName (str) –
- aValue (float) –
-
setShaderVariableLUTForAll(self, variableName: str, aLUT: ORSModel.ors.LookupTable) → None¶ Set a shader variable of type LUT that applies to all views.
Parameters: - variableName (str) –
- aLUT (ORSModel.ors.LookupTable) –
-
setShaderVariableLUTForView(self, view: ORSModel.ors.View, variableName: str, aLUT: ORSModel.ors.LookupTable) → None¶ Set a shader variable of type LUT that applies to a specific view.
Parameters: - view (ORSModel.ors.View) –
- variableName (str) –
- aLUT (ORSModel.ors.LookupTable) –
-
Saver¶
-
class
ORSModel.ors.Saver¶ Bases:
ORSModel.ors.Managedbrief_description: Allows to save author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: Loader Allows to save ORS objects, for later retrieval. ORS objects are saved in XML format, so this loader uses internally the msxml framework (hence the frequent mention of DOM). Can also be used to create any XML (i.e. not just saving objects).
-
addAttributeToCurrentNode(self, attributName: str, attributeValue: str) → None¶ Adds a string attribute to the current node of an XML tree.
Parameters: - attributName (str) – the attribute name (a string)
- attributeValue (str) – the attribute value (a string)
-
addBoolAttributeToCurrentNode(self, sAttributeName: str, bValue: bool) → None¶ Adds a boolean attribute to the current node of an XML tree.
Parameters: - sAttributeName (str) – the attribute name (a string)
- bValue (bool) – the attribute value (a bool)
-
addDoubleAttributeToCurrentNode(self, sAttributeName: str, fValue: float) → None¶ Adds a double attribute to the current node of an XML tree.
Parameters: - sAttributeName (str) – the attribute name (a string)
- fValue (float) – the attribute value (a double)
-
addFloatAttributeToCurrentNode(self, sAttributeName: str, fValue: float) → None¶ Adds a float attribute to the current node of an XML tree.
Parameters: - sAttributeName (str) – the attribute name (a string)
- fValue (float) – the attribute value (a float)
-
addIntAttributeToCurrentNode(self, sAttributeName: str, lValue: int) → None¶ Adds an int attribute to the current node of an XML tree.
Parameters: - sAttributeName (str) – the attribute name (a string)
- lValue (int) – the attribute value (an int)
-
addLONGLONGAttributeToCurrentNode(self, sAttributeName: str, lValue: int) → None¶ Adds a int64_t attribute to the current node of an XML tree.
Parameters: - sAttributeName (str) – the attribute name (a string)
- lValue (int) – the attribute value (a int64_t)
-
addShortAttributeToCurrentNode(self, sAttributeName: str, lValue: int) → None¶ Adds a short attribute to the current node of an XML tree.
Parameters: - sAttributeName (str) – the attribute name (a string)
- lValue (int) – the attribute value (a short)
-
addSimpleBoolElementToCurrentNode(self, sElementName: str, bElementValue: bool) → None¶ Adds a boolean element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- bElementValue (bool) – the element value (a bool)
-
addSimpleCDATAElementToCurrentNode(self, sElementName: str, sElementValue: str) → None¶ Adds a CDATA element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- sElementValue (str) – the element value (a string)
-
addSimpleDoubleElementToCurrentNode(self, sElementName: str, iElementValue: float) → None¶ Adds a double element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- iElementValue (float) – the element value (a double)
-
addSimpleElementToCurrentNode(self, elementName: str, elementValue: str) → None¶ Adds a string element to the current node of an XML tree.
Parameters: - elementName (str) – the element name (a string)
- elementValue (str) – the element value (a string)
-
addSimpleFloatElementToCurrentNode(self, sElementName: str, iElementValue: float) → None¶ Adds a float element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- iElementValue (float) – the element value (a float)
-
addSimpleIntElementToCurrentNode(self, sElementName: str, lElementValue: int) → None¶ Adds an int element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- lElementValue (int) – the element value (an int)
-
addSimpleLONGLONGElementToCurrentNode(self, sElementName: str, lElementValue: int) → None¶ Adds a int64_t element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- lElementValue (int) – the element value (a int64_t)
-
addSimpleShortElementToCurrentNode(self, sElementName: str, lElementValue: int) → None¶ Adds a short element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- lElementValue (int) – the element value (a short)
-
addSimpleULONGLONGElementToCurrentNode(self, sElementName: str, iElementValue: int) → None¶ Adds an uint64_t element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- iElementValue (int) – the element value (an uint64_t)
-
addSimpleUnsignedIntElementToCurrentNode(self, sElementName: str, iElementValue: int) → None¶ Adds an unsigned int element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- iElementValue (int) – the element value (an unsigned int)
-
addSimpleUnsignedShortElementToCurrentNode(self, sElementName: str, iElementValue: int) → None¶ Adds an unsigned short element to the current node of an XML tree.
Parameters: - sElementName (str) – the element name (a string)
- iElementValue (int) – the element value (an unsigned short)
-
addULONGLONGAttributeToCurrentNode(self, sAttributeName: str, iValue: int) → None¶ Adds an uint64_t attribute to the current node of an XML tree.
Parameters: - sAttributeName (str) – the attribute name (a string)
- iValue (int) – the attribute value (an uint64_t)
-
addUnsignedIntAttributeToCurrentNode(self, sAttributeName: str, iValue: int) → None¶ Adds an unsigned int attribute to the current node of an XML tree.
Parameters: - sAttributeName (str) – the attribute name (a string)
- iValue (int) – the attribute value (an unsigned int)
-
addUnsignedShortAttributeToCurrentNode(self, sAttributeName: str, iValue: int) → None¶ Adds an unsigned short attribute to the current node of an XML tree.
Parameters: - sAttributeName (str) – the attribute name (a string)
- iValue (int) – the attribute value (an unsigned short)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getXML(self) → str¶ Returns: output (str) –
-
loadFromFile(self, anXMLFilename: str) → bool¶ Initializes the saver from an XML file.
Parameters: anXMLFilename (str) – the file name, including full path (a string) Returns: output (bool) – true if file was successfully loaded, false otherwise
-
loadString(self, anXMLString: str) → bool¶ Initializes the saver from an XML string.
Parameters: anXMLString (str) – a valid XML (a string) Returns: output (bool) – true if string was successfully loaded, false otherwise
-
none()¶ Saver.__init__() -> Saver
-
pop(self) → None¶ Goes up one level in an XML tree being created.
-
push(self, aXMLNodeName: str) → None¶ Creates a new node in an XML tree.
Note
Should eventually be matched by a call to pop() to go back one level.
Note
All ORS objects can save themselves to file, in an XML format.
Parameters: aXMLNodeName (str) – the node name (a string)
-
saveXMLToFile(self, pFilename: str) → int¶ Saves the contents of theSaver as XML format to a file.
Note
Note that the file is overwritten if it exists.
Parameters: pFilename (str) – the file name, including full path (a string) Returns: output (int) – 0 if successful, an error code otherwise (an int)
-
SequenceableCollection¶
-
class
ORSModel.ors.SequenceableCollection¶ Bases:
ORSModel.ors.Collectionbrief_description: Abstraction class for sequenceable collections. author: Normand Mongeau. version: 1.0 Abstraction class for sequenceable collections. Sequenceable collections are collections that have an innate ordering.
-
asArray(self) → Array¶ Returns: output (ORSModel.ors.Array) –
-
asOrderedCollection(self) → OrderedCollection¶ Returns: output (ORSModel.ors.OrderedCollection) –
-
atAsDouble(self, index: int) → float¶ Parameters: index (int) – Returns: output (float) –
-
atPutAsDouble(self, index: int, pValue: float) → None¶ Parameters: - index (int) –
- pValue (float) –
-
dtype¶
-
getAsNDArray()¶
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMaxValueAsDouble(self) → float¶ Returns: output (float) –
-
getMaxValueAsDoubleInRange(self, startIndex: int, endIndex: int) → float¶ Parameters: - startIndex (int) –
- endIndex (int) –
Returns: output (float) –
-
getMeanValueAsDouble(self) → float¶ Returns: output (float) –
-
getMeanValueAsDoubleInRange(self, startIndex: int, endIndex: int) → float¶ Parameters: - startIndex (int) –
- endIndex (int) –
Returns: output (float) –
-
getMinValueAsDouble(self) → float¶ Returns: output (float) –
-
getMinValueAsDoubleInRange(self, startIndex: int, endIndex: int) → float¶ Parameters: - startIndex (int) –
- endIndex (int) –
Returns: output (float) –
-
getStandardDeviationAsDouble(self) → float¶ Returns: output (float) –
-
getStandardDeviationAsDoubleInRange(self, startIndex: int, endIndex: int) → float¶ Parameters: - startIndex (int) –
- endIndex (int) –
Returns: output (float) –
-
none()¶ SequenceableCollection.__init__() -> SequenceableCollection
-
removeAt(self, index: int) → None¶ Parameters: index (int) –
-
removeFirst(self) → None¶
-
removeLast(self) → None¶
-
reverse(self) → None¶
-
setSize(self, iNewSize: int) → None¶ Sets the size of theSequenceableCollection.
Note
The size can be used to lengthen or shorten it. Data contents are preserved.
Note
Avoid calling this method frequently as it is costly, shuffling and allocating memory.
Parameters: iNewSize (int) –
-
shape¶
-
sortAscending(self, bSlave: ORSModel.ors.SequenceableCollection, cSlave: ORSModel.ors.SequenceableCollection, dSlave: ORSModel.ors.SequenceableCollection, eSlave: ORSModel.ors.SequenceableCollection) → None¶ Parameters: - bSlave (ORSModel.ors.SequenceableCollection) –
- cSlave (ORSModel.ors.SequenceableCollection) –
- dSlave (ORSModel.ors.SequenceableCollection) –
- eSlave (ORSModel.ors.SequenceableCollection) –
-
sortDescending(self, bSlave: ORSModel.ors.SequenceableCollection, cSlave: ORSModel.ors.SequenceableCollection, dSlave: ORSModel.ors.SequenceableCollection, eSlave: ORSModel.ors.SequenceableCollection) → None¶ Parameters: - bSlave (ORSModel.ors.SequenceableCollection) –
- cSlave (ORSModel.ors.SequenceableCollection) –
- dSlave (ORSModel.ors.SequenceableCollection) –
- eSlave (ORSModel.ors.SequenceableCollection) –
-
sortRangeAscending(self, index1: int, index2: int) → None¶ Parameters: - index1 (int) –
- index2 (int) –
-
sortRangeDescending(self, index1: int, index2: int) → None¶ Parameters: - index1 (int) –
- index2 (int) –
-
swap(self, index: int, index2: int) → None¶ Parameters: - index (int) –
- index2 (int) –
-
transformCoordinate(self, aTransform: ORSModel.ors.Matrix4x4) → None¶ Apply the 3D coordinate transformation to the elements of the collection.
Parameters: aTransform (ORSModel.ors.Matrix4x4) –
-
transformVector(self, aTransform: ORSModel.ors.Matrix4x4) → None¶ Apply the 3D coordinate transformation to the elements of the collection.
Parameters: aTransform (ORSModel.ors.Matrix4x4) –
-
Shape¶
-
class
ORSModel.ors.Shape¶ Bases:
ORSModel.ors.Unmanagedbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2017
-
atomicLoad(self, aFilename: str) → None¶ Loads an object from a file.
Note
Objects are saved in XML format.
Note
The file should contain only one object. If it contains more than one object, use atomicLoadSpecificNode().
Parameters: aFilename (str) – a file path (a string)
-
atomicSave(self, aFilename: str) → int¶ Saves the object to a file.
Note
Objects are saved in XML format.
Note
The file will be overwritten if it exists.
Parameters: aFilename (str) – a file path (a string) Returns: output (int) – a result code (0 if successful)
-
copy(self) → Unmanaged¶ Gets a copy of the receiver.
Returns: output (ORSModel.ors.Unmanaged) – a shape
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getRotated(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → Shape¶ Parameters: - axisOfRotation (ORSModel.ors.Vector3) –
- rotationCenter (ORSModel.ors.Vector3) –
- angle (float) –
Returns: output (ORSModel.ors.Shape) –
-
getTransformed(self, aMatrix: ORSModel.ors.Matrix4x4) → Shape¶ Parameters: aMatrix (ORSModel.ors.Matrix4x4) – Returns: output (ORSModel.ors.Shape) –
-
none()¶ Shape.__init__() -> Shape
-
rotate(self, axisInWorld: ORSModel.ors.Vector3, aroundPointInWorld: ORSModel.ors.Vector3, angleInRadian: float) → None¶ Applies a rotation to the receiver.
Note
The box is a right handed bounded referential.
Parameters: - axisInWorld (ORSModel.ors.Vector3) – a rotation axis (an Vector3)
- aroundPointInWorld (ORSModel.ors.Vector3) – a center of rotation (an Vector3)
- angleInRadian (float) – an angle in radian (a double)
-
transform(self, transformationMatrix: ORSModel.ors.Matrix4x4) → None¶ Applies a transformation to the receiver.
Note
The transformation can include: translation, rotation and scaling.
Parameters: transformationMatrix (ORSModel.ors.Matrix4x4) – a transformation matrix (an Matrix4x4)
-
Shape2D¶
-
class
ORSModel.ors.Shape2D¶ Bases:
ORSModel.ors.Shape-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ Shape2D.__init__() -> Shape2D
-
Shape3D¶
-
class
ORSModel.ors.Shape3D¶ Bases:
ORSModel.ors.Shape-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ Shape3D.__init__() -> Shape3D
-
Sphere¶
-
class
ORSModel.ors.Sphere¶ Bases:
ORSModel.ors.Shape3Dbrief_description: None author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: January 2017
-
copy(self) → Sphere¶ Gets a copy of the receiver.
Returns: output (ORSModel.ors.Sphere) – a shape
-
createFromPythonRepresentation(aPythonRepresentation: str) → Sphere¶ Create aSphere from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Sphere) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ set aSphere from a python representation
Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getCenter(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getIntersectionWithLine(self, aLine: ORSModel.ors.Line) → LineSegment¶ Return the vector representing the intersection of the provided line and the receiver.
Parameters: aLine (ORSModel.ors.Line) – Returns: output (ORSModel.ors.LineSegment) – a vector (an Vector3) or none if not intersecting
-
getIntersectionWithLineSegment(self, aLineSegment: ORSModel.ors.LineSegment) → LineSegment¶ Return the vector representing the intersection of the provided line segment and the receiver.
Parameters: aLineSegment (ORSModel.ors.LineSegment) – Returns: output (ORSModel.ors.LineSegment) – a vector (an Vector3) or none if not intersecting
-
getIsEqualTo(self, Sphere: ORSModel.ors.Sphere) → bool¶ Verifies equality between the receiver and a givenSphere.
Parameters: Sphere (ORSModel.ors.Sphere) – Returns: output (bool) – true if the argument Sphere is equal to the receiver, false otherwise
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getRadius(self) → float¶ Returns: output (float) –
-
getRotated(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → Sphere¶ Parameters: - axisOfRotation (ORSModel.ors.Vector3) –
- rotationCenter (ORSModel.ors.Vector3) –
- angle (float) –
Returns: output (ORSModel.ors.Sphere) –
-
getSurface(self) → float¶ Gets the surface.
Returns: output (float) – a surface (a double)
-
getVolume(self) → float¶ Gets the volume.
Returns: output (float) – a volume (a double)
-
none()¶ Sphere.__init__() -> Sphere
-
rotate(self, axisOfRotation: ORSModel.ors.Vector3, rotationCenter: ORSModel.ors.Vector3, angle: float) → None¶ Applies a rotation to the receiver.
Note
The box is a right handed bounded referential.
Parameters: - axisInWorld (ORSModel.ors.Vector3) – a rotation axis (an Vector3)
- aroundPointInWorld (ORSModel.ors.Vector3) – a center of rotation (an Vector3)
- angleInRadian (float) – an angle in radian (a double)
-
setCenter(self, center: ORSModel.ors.Vector3) → None¶ Parameters: center (ORSModel.ors.Vector3) –
-
setRadius(self, radius: float) → None¶ Parameters: radius (float) –
-
StatisticalAnalyzer¶
-
class
ORSModel.ors.StatisticalAnalyzer¶ Bases:
ORSModel.ors.Unmanaged-
analyze(self, momentsCount: int, median: bool, aCollection: ORSModel.ors.Collection) → None¶ Parameters: - momentsCount (int) –
- median (bool) –
- aCollection (ORSModel.ors.Collection) –
-
analyzeSubset(self, momentsCount: int, median: bool, startIndex: int, endIndex: int, aCollection: ORSModel.ors.SequenceableCollection) → None¶ Parameters: - momentsCount (int) –
- median (bool) –
- startIndex (int) –
- endIndex (int) –
- aCollection (ORSModel.ors.SequenceableCollection) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getMaximumValue(self) → float¶ Returns: output (float) –
-
getMedian(self) → float¶ Returns: output (float) –
-
getMinimumValue(self) → float¶ Returns: output (float) –
-
getMoment(self, momentIndex: int) → float¶ Parameters: momentIndex (int) – Returns: output (float) –
-
none()¶ StatisticalAnalyzer.__init__() -> StatisticalAnalyzer
-
StructuredGrid¶
-
class
ORSModel.ors.StructuredGrid¶ Bases:
ORSModel.ors.Node-
copyShapeFromBox(self, pBox: ORSModel.ors.Box, tSize: int) → None¶ Initializes the structured grid’s shape based on a box.
Parameters: - pBox (ORSModel.ors.Box) – a box (a Box)
- tSize (int) – a T size (an uint32_t)
-
copyShapeFromRectangle(self, aRectangle: ORSModel.ors.Rectangle, zSpacing: float, tSize: int) → None¶ Initializes the structured grid’s shape based on a rectangle.
Parameters: - aRectangle (ORSModel.ors.Rectangle) – a rectangle (a Rectangle)
- zSpacing (float) – the thickness of the output structured grid (a double)
- tSize (int) – a T size (an uint32_t)
-
copyShapeFromStructuredGrid(self, pStructuredGrid: ORSModel.ors.StructuredGrid) → None¶ Initializes the structured grid’s shape based on another structured grid.
Note
Shape includes size, spacing, type, description, position and location.
Note
This method does not handle the structured grid’s data.
Parameters: pStructuredGrid (ORSModel.ors.StructuredGrid) – a source structured grid
-
getAsChannel(self, inOutStructuredGrid: ORSModel.ors.StructuredGrid, IProgress: ORSModel.ors.Progress) → StructuredGrid¶ Convert a structured grid to a channel.
Note
If an output channel is supplied, data is written to it and returned, otherwise a new channel is created.
Note
If the source structured grid is a channel it returns a copy.
Note
If the source structured grid is a Volume ROI the channel output data type is UNSIGNED CHAR. A value of 1 is written where a label exist in the input Volume ROI, 0 otherwise.
Note
If the source structured grid is a MultiROI the output data type is determined by the total number of labels within:
Parameters: - inOutStructuredGrid (ORSModel.ors.StructuredGrid) – an optional output channel (an StructuredGrid)
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.StructuredGrid) – the resulting channel (an StructuredGrid)
-
getAsMultiROI(self, inOutStructuredGrid: ORSModel.ors.StructuredGrid, IProgress: ORSModel.ors.Progress) → StructuredGrid¶ Convert a structured grid to aMultiROI.
Note
If an output MultiROI is supplied, data is written to it and returned, otherwise a new MultiROI is created.
Note
The MultiROI is cleared prior to adding.
Note
If the source structured grid is a channel the output MultiROI will contain a label for every non zero channel values.
Note
If the source structured grid is a Volume ROI it returns a MultiROI of 1 label.
Note
If the source structured grid is a MultiROI it returns a copy.
Parameters: - inOutStructuredGrid (ORSModel.ors.StructuredGrid) – an optional output MultiROI (an StructuredGrid)
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.StructuredGrid) – the resulting MultiROI (an StructuredGrid)
-
getAsROI(self, inOutStructuredGrid: ORSModel.ors.StructuredGrid, IProgress: ORSModel.ors.Progress) → StructuredGrid¶ Convert a structured grid to a VolumeROI.
Note
If an output ROI is supplied, data is written to it and returned, otherwise a new ROI is created.
Note
The ROI is cleared prior to adding.
Note
If the source structured grid is a channel the output Volume ROI will contain voxel for every non zero channel values.
Note
If the source structured grid is a Volume ROI it returns a copy.
Note
If the source structured grid is a MultiROI it extracts the labels and adds them all to a Volume ROI.
Parameters: - inOutStructuredGrid (ORSModel.ors.StructuredGrid) – an optional output Volume ROI (an StructuredGrid)
- IProgress (ORSModel.ors.Progress) – an optional progress object (a Progress)
Returns: output (ORSModel.ors.StructuredGrid) – the resulting Volume ROI (an StructuredGrid)
-
getBoundingBox(self, pTIndex: int) → Box¶ Parameters: pTIndex (int) – Returns: output (ORSModel.ors.Box) –
-
getBox(self) → Box¶ Gets the box.
Returns: output (ORSModel.ors.Box) – the box (an Box)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getDirtyBox(self, bResetDirtyBox: bool) → Box¶ Gets the dirty box.
Parameters: bResetDirtyBox (bool) – insicate that the dirty box should be resetted (a bool) Returns: output (ORSModel.ors.Box) – the dirty box (a Box)
-
getHasSameShape(self, pStructuredGrid: ORSModel.ors.StructuredGrid) → bool¶ Verifies if the structured grid has same shape as another structured grid (see note below).
Note
Shape comparison includes axis sizes, spacing, position and orientation.
Parameters: pStructuredGrid (ORSModel.ors.StructuredGrid) – a comparison structured grid Returns: output (bool) – true if the comparison structured grid has same shape as receiver structured grid, false otherwise
-
getIndexOfFirstIntersectingNonZeroElement(self, aLine: ORSModel.ors.Line, subBox: ORSModel.ors.Box, timestep: int) → Vector3¶ Parameters: - aLine (ORSModel.ors.Line) –
- subBox (ORSModel.ors.Box) –
- timestep (int) –
Returns: output (ORSModel.ors.Vector3) –
-
getIsIdenticalTo(self, pStructuredGrid: ORSModel.ors.StructuredGrid) → bool¶ Verifies if the structured grid is identical to another structured grid (see note below).
Note
Comparison of shape and data.
Parameters: pStructuredGrid (ORSModel.ors.StructuredGrid) – a comparison structured grid (a StructuredGrid) Returns: output (bool) – TRUE if the comparison structured grid has the same shape and data as receiver structured grid, FALSE otherwise
-
getLabelAtPosition(self, tIndex: int, worldPosition: ORSModel.ors.Vector3) → int¶ Parameters: - tIndex (int) –
- worldPosition (ORSModel.ors.Vector3) –
Returns: output (int) –
-
getOrigin(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getOriginalBox(self) → Box¶ Returns: output (ORSModel.ors.Box) –
-
getPositionOfFirstIntersectingNonZeroElement(self, aLine: ORSModel.ors.Line, subBox: ORSModel.ors.Box, timestep: int) → Vector3¶ Parameters: - aLine (ORSModel.ors.Line) –
- subBox (ORSModel.ors.Box) –
- timestep (int) –
Returns: output (ORSModel.ors.Vector3) –
-
getSliceAtIndex(self, zIndex: int, inStructuredGridSlice: ORSModel.ors.StructuredGrid, IProgress: ORSModel.ors.Progress) → StructuredGrid¶ Parameters: - zIndex (int) –
- inStructuredGridSlice (ORSModel.ors.StructuredGrid) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.StructuredGrid) –
-
getSliceIntersectingBoundedPlane(self, aBoundedPlane: ORSModel.ors.Rectangle, inStructuredGridSlice: ORSModel.ors.StructuredGrid, IProgress: ORSModel.ors.Progress) → StructuredGrid¶ Parameters: - aBoundedPlane (ORSModel.ors.Rectangle) –
- inStructuredGridSlice (ORSModel.ors.StructuredGrid) –
- IProgress (ORSModel.ors.Progress) –
Returns: output (ORSModel.ors.StructuredGrid) –
-
getSpaceHasBeenTransformed(self) → bool¶ Returns: output (bool) –
-
getSpacingInDirection(self, pDirection: ORSModel.ors.Vector3) → float¶ Gets the spacing in the specified direction.
Note
A structured grid knows its X, Y and Z spacing but can compute the spacing in any direction with this method.
Parameters: pDirection (ORSModel.ors.Vector3) – the direction vector (an Vector3) Returns: output (float) – The spacing (a double)
-
getSubset(self, xmin: int, ymin: int, zmin: int, tmin: int, xmax: int, ymax: int, zmax: int, tmax: int, inChannelSubset: ORSModel.ors.StructuredGrid, IProgress: ORSModel.ors.Progress) → StructuredGrid¶ Gets a subset of the the structuredGrid.
Note
To prevent creating extra StructuredGrid, the output StructuredGrid can be fed as the second to last argument to the method.
Note
If an output structured grid is not supplied, a StructuredGrid of the same base type will be created, otherwise the data will be fed directly into it.
Parameters: - xmin (int) – the X lower range (an uint32_t)
- ymin (int) – the Y lower range (an uint32_t)
- zmin (int) – the Z lower range (an uint32_t)
- tmin (int) – the T lower range (an uint32_t)
- xmax (int) – the X upper range (an uint32_t)
- ymax (int) – the Y upper range (an uint32_t)
- zmax (int) – the Z upper range (an uint32_t)
- tmax (int) – the T upper range (an uint32_t)
- inChannelSubset (ORSModel.ors.StructuredGrid) – the output structured grid (see notes)
- IProgress (ORSModel.ors.Progress) – an optional progress object
Returns: output (ORSModel.ors.StructuredGrid) – a StructuredGrid (see notes)
-
getTSize(self) → int¶ Gets the T size of the structured grid.
Note
The T size is expressed in units.
Returns: output (int) – the T size (an uint32_t)
-
getTSpacing(self) → float¶ Gets the structured grid’s T spacing.
Note
Spacing is used for structured grid visual representation.
Returns: output (float) – T spacing (a double)
-
getTransformationFromOriginalReferential(self) → Matrix4x4¶ Returns: output (ORSModel.ors.Matrix4x4) –
-
getVoxelToWorldCoordinates(self, anIndex: ORSModel.ors.Vector3) → Vector3¶ Gets a given voxel’s location in DICOM Reference Coordinates System.
Note
This method returns the world coordinates of any given voxel. The arguments supplied represent the voxel index, but can be offset by a value between 0 and 1, to discover the exact subvoxel location. For example, to find the exact middle location of the voxel at x30,y50,z65, use getVoxelToWorldCoordinates (30.5, 50.5, 65.5).
Parameters: anIndex (ORSModel.ors.Vector3) – the voxel coordinate as a Vector3 Returns: output (ORSModel.ors.Vector3) – the world coordinates (in a vector) of the voxel (an Vector3)
-
getWorldToVoxelCoordinates(self, pPointInWorld: ORSModel.ors.Vector3) → Vector3¶ Gets a given voxel’s index from DICOM Reference Coordinates System.
Parameters: pPointInWorld (ORSModel.ors.Vector3) – the voxel coordinate encoded in Vector3 Returns: output (ORSModel.ors.Vector3) – the voxel coordinates (in a vector) of the voxel (an Vector3)
-
getXSize(self) → int¶ Gets the X size of the structured grid.
Note
The size is expressed in pixels.
Returns: output (int) – the X size (an uint32_t)
-
getXSpacing(self) → float¶ Gets the structured grid’s X spacing.
Note
Spacing is used for structured grid visual representation.
Returns: output (float) – X spacing (a double)
-
getYSize(self) → int¶ Gets the Y size of the structured grid.
Note
The size is expressed in pixels.
Returns: output (int) – the Y size (an uint32_t)
-
getYSpacing(self) → float¶ Gets the structured grid’s Y spacing.
Note
Spacing is used for structured grid visual representation.
Returns: output (float) – Y spacing (a double)
-
getZSize(self) → int¶ Gets the Z size of the structured grid.
Note
The size is expressed in pixels.
Returns: output (int) – the Z size (an uint32_t)
-
getZSliceThickness(self) → float¶ Gets the structured grid’s Z slice thickness.
Note
Slice thickness is used for structured grid visual representation.
Returns: output (float) – Z slice thickness (a double)
-
getZSpacing(self) → float¶ Gets the structured grid’s Z spacing.
Note
Spacing is used for structured grid visual representation.
Returns: output (float) – Z spacing (a double)
-
none()¶ StructuredGrid.__init__() -> StructuredGrid
-
paintBox(self, pBox: ORSModel.ors.Box, label: float, tStep: int) → None¶ Parameters: - pBox (ORSModel.ors.Box) –
- label (float) –
- tStep (int) –
-
paintBoxIfInRange(self, pBox: ORSModel.ors.Box, label: float, tStep: int, fMinValue: float, fMaxValue: float, pRangeChannel: ORSModel.ors.StructuredGrid) → None¶ Parameters: - pBox (ORSModel.ors.Box) –
- label (float) –
- tStep (int) –
- fMinValue (float) –
- fMaxValue (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
-
paintCircleOnPlane(self, pPlane: ORSModel.ors.Rectangle, worldPos: ORSModel.ors.Vector3, radius: float, label: float, timeIndex: int, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- worldPos (ORSModel.ors.Vector3) –
- radius (float) –
- label (float) –
- timeIndex (int) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintCircleOnPlaneIfInRange(self, pPlane: ORSModel.ors.Rectangle, worldPos: ORSModel.ors.Vector3, radius: float, label: float, timeIndex: int, lowerThreshold: float, upperThreshold: float, pRangeChannel: ORSModel.ors.StructuredGrid, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- worldPos (ORSModel.ors.Vector3) –
- radius (float) –
- label (float) –
- timeIndex (int) –
- lowerThreshold (float) –
- upperThreshold (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintEllipseOnPlane(self, pPlane: ORSModel.ors.Rectangle, worldPos: ORSModel.ors.Vector3, dir0Radius: float, dir1Radius: float, axisOrientation: float, label: float, timeIndex: int, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- worldPos (ORSModel.ors.Vector3) –
- dir0Radius (float) –
- dir1Radius (float) –
- axisOrientation (float) –
- label (float) –
- timeIndex (int) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintEllipseOnPlaneIfInRange(self, pPlane: ORSModel.ors.Rectangle, worldPos: ORSModel.ors.Vector3, dir0Radius: float, dir1Radius: float, axisOrientation: float, label: float, timeIndex: int, lowerThreshold: float, upperThreshold: float, pRangeChannel: ORSModel.ors.StructuredGrid, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- worldPos (ORSModel.ors.Vector3) –
- dir0Radius (float) –
- dir1Radius (float) –
- axisOrientation (float) –
- label (float) –
- timeIndex (int) –
- lowerThreshold (float) –
- upperThreshold (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintPolygonOnPlane(self, pPlane: ORSModel.ors.Rectangle, polygonWorldPos: ORSModel.ors.ArrayDouble, label: float, timeIndex: int, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- polygonWorldPos (ORSModel.ors.ArrayDouble) –
- label (float) –
- timeIndex (int) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintPolygonOnPlaneIfInRange(self, pPlane: ORSModel.ors.Rectangle, polygonWorldPos: ORSModel.ors.ArrayDouble, label: float, timeIndex: int, lowerThreshold: float, upperThreshold: float, pRangeChannel: ORSModel.ors.StructuredGrid, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- polygonWorldPos (ORSModel.ors.ArrayDouble) –
- label (float) –
- timeIndex (int) –
- lowerThreshold (float) –
- upperThreshold (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintRectangleOnPlane(self, pPlane: ORSModel.ors.Rectangle, worldPos: ORSModel.ors.Vector3, dir0Length: float, dir1Length: float, label: float, timeIndex: int, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- worldPos (ORSModel.ors.Vector3) –
- dir0Length (float) –
- dir1Length (float) –
- label (float) –
- timeIndex (int) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintRectangleOnPlaneIfInRange(self, pPlane: ORSModel.ors.Rectangle, worldPos: ORSModel.ors.Vector3, dir0Length: float, dir1Length: float, label: float, timeIndex: int, lowerThreshold: float, upperThreshold: float, pRangeChannel: ORSModel.ors.StructuredGrid, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- worldPos (ORSModel.ors.Vector3) –
- dir0Length (float) –
- dir1Length (float) –
- label (float) –
- timeIndex (int) –
- lowerThreshold (float) –
- upperThreshold (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintShape3D(self, aShape: ORSModel.ors.Shape3D, label: float, tStep: int) → None¶ Parameters: - aShape (ORSModel.ors.Shape3D) –
- label (float) –
- tStep (int) –
-
paintShape3DIfInRange(self, aShape: ORSModel.ors.Shape3D, label: float, tStep: int, fMinValue: float, fMaxValue: float, pRangeChannel: ORSModel.ors.StructuredGrid) → None¶ Parameters: - aShape (ORSModel.ors.Shape3D) –
- label (float) –
- tStep (int) –
- fMinValue (float) –
- fMaxValue (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
-
paintSphere(self, worldPos: ORSModel.ors.Vector3, fRadius: float, label: float, tStep: int) → None¶ Parameters: - worldPos (ORSModel.ors.Vector3) –
- fRadius (float) –
- label (float) –
- tStep (int) –
-
paintSphereIfInRange(self, worldPos: ORSModel.ors.Vector3, fRadius: float, label: float, tStep: int, fMinValue: float, fMaxValue: float, pRangeChannel: ORSModel.ors.StructuredGrid) → None¶ Parameters: - worldPos (ORSModel.ors.Vector3) –
- fRadius (float) –
- label (float) –
- tStep (int) –
- fMinValue (float) –
- fMaxValue (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
-
paintSquareOnPlane(self, pPlane: ORSModel.ors.Rectangle, worldPos: ORSModel.ors.Vector3, radius: float, label: float, timeIndex: int, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- worldPos (ORSModel.ors.Vector3) –
- radius (float) –
- label (float) –
- timeIndex (int) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintSquareOnPlaneIfInRange(self, pPlane: ORSModel.ors.Rectangle, worldPos: ORSModel.ors.Vector3, radius: float, label: float, timeIndex: int, lowerThreshold: float, upperThreshold: float, pRangeChannel: ORSModel.ors.StructuredGrid, worldPositionArray: ORSModel.ors.ArrayDouble) → None¶ Parameters: - pPlane (ORSModel.ors.Rectangle) –
- worldPos (ORSModel.ors.Vector3) –
- radius (float) –
- label (float) –
- timeIndex (int) –
- lowerThreshold (float) –
- upperThreshold (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
- worldPositionArray (ORSModel.ors.ArrayDouble) –
-
paintSubset(self, startX: int, startY: int, startZ: int, endX: int, endY: int, endZ: int, label: float, tStep: int) → None¶ Parameters: - startX (int) –
- startY (int) –
- startZ (int) –
- endX (int) –
- endY (int) –
- endZ (int) –
- label (float) –
- tStep (int) –
-
paintSubsetIfInRange(self, startX: int, startY: int, startZ: int, endX: int, endY: int, endZ: int, label: float, tStep: int, lowerThreshold: float, upperThreshold: float, pRangeChannel: ORSModel.ors.StructuredGrid) → None¶ Parameters: - startX (int) –
- startY (int) –
- startZ (int) –
- endX (int) –
- endY (int) –
- endZ (int) –
- label (float) –
- tStep (int) –
- lowerThreshold (float) –
- upperThreshold (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
-
paintVoxelsFromWorldCoordinates(self, worldPositionArray: ORSModel.ors.ArrayDouble, label: float, timeIndex: int) → None¶ Parameters: - worldPositionArray (ORSModel.ors.ArrayDouble) –
- label (float) –
- timeIndex (int) –
-
paintVoxelsFromWorldCoordinatesIfInRange(self, worldPositionArray: ORSModel.ors.ArrayDouble, label: float, timeIndex: int, lowerThreshold: float, upperThreshold: float, pRangeChannel: ORSModel.ors.StructuredGrid) → None¶ Parameters: - worldPositionArray (ORSModel.ors.ArrayDouble) –
- label (float) –
- timeIndex (int) –
- lowerThreshold (float) –
- upperThreshold (float) –
- pRangeChannel (ORSModel.ors.StructuredGrid) –
-
projectInto(self, aDestinationStructuredGrid: ORSModel.ors.StructuredGrid, IProgress: ORSModel.ors.Progress) → None¶ Copies the receiver into the destination, keeping the destination shape.
Parameters: - aDestinationStructuredGrid (ORSModel.ors.StructuredGrid) – a destination StructuredGrid (a StructuredGrid)
- IProgress (ORSModel.ors.Progress) –
-
setBox(self, IInBox: ORSModel.ors.Box) → None¶ Sets the box.
Parameters: IInBox (ORSModel.ors.Box) – the box (an Box)
-
setCurrentShapeAsOriginal(self) → None¶
-
setOrigin(self, origin: ORSModel.ors.Vector3) → None¶ Parameters: origin (ORSModel.ors.Vector3) –
-
setTSize(self, pTSize: int) → None¶ Sets the T size of the structured grid.
Note
The T size is expressed in units.
Parameters: pTSize (int) – T size (an uint32_t)
-
setTSpacing(self, pTSpacing: float) → None¶ Sets the structured grid’s T spacing.
Note
Spacing is used for structured grid visual representation.
Parameters: pTSpacing (float) – T spacing (a double)
-
setXSize(self, pXSize: int) → None¶ Sets the X size of the structured grid.
Note
The size is expressed in pixels.
Parameters: pXSize (int) – X size (an uint32_t)
-
setXSpacing(self, pXSpacing: float) → None¶ Sets the structured grid’s X spacing.
Note
Spacing is used for structured grid visual representation.
Parameters: pXSpacing (float) – X spacing (a double)
-
setXYZTSize(self, pXSize: int, pYSize: int, pZSize: int, pTSize: int) → None¶ Sets the X,Y,Z,T sizes of the structured grid.
Note
The size is expressed in pixels.
Parameters: - pXSize (int) – X size (an uint32_t)
- pYSize (int) – Y size (an uint32_t)
- pZSize (int) – Z size (an uint32_t)
- pTSize (int) – T size (an uint32_t)
-
setYSize(self, pYSize: int) → None¶ Sets the Y size of the structured grid.
Note
The size is expressed in pixels.
Parameters: pYSize (int) – Y size (an uint32_t)
-
setYSpacing(self, pYSpacing: float) → None¶ Sets the structured grid’s Y spacing.
Note
Spacing is used for structured grid visual representation.
Parameters: pYSpacing (float) – Y spacing (a double)
-
setZSize(self, pZSize: int) → None¶ Sets the Z size of the structured grid.
Note
The size is expressed in pixels.
Parameters: pZSize (int) – Z size (an uint32_t)
-
setZSliceThickness(self, pZThickness: float) → None¶ Sets the structured grid’s Z slice thickness.
Note
Slice thickness is used for structured grid visual representation.
Parameters: pZThickness (float) – Z slice thickness (a double)
-
setZSpacing(self, pZSpacing: float) → None¶ Sets the structured grid’s Z spacing.
Note
Spacing is used for structured grid visual representation.
Parameters: pZSpacing (float) – Z spacing (a double)
-
shape¶
-
sliceIteratorFromBox(viewBox, mask=None, usePositiveMask=True, computeMask=False)¶
-
sliceIteratorFromDirection(dir0, dir1, mask=None, positiveMask=True, computeMask=False)¶
-
sliceIteratorFromView(view, mask=None, positiveMask=True, computeMask=False)¶
-
TraceBackChannelAnalyzer¶
-
class
ORSModel.ors.TraceBackChannelAnalyzer¶ Bases:
ORSModel.ors.Unmanaged-
findAllLeaves(self, aChannel: ORSModel.ors.Channel, inputROI: ORSModel.ors.ROI) → ROI¶ Parameters: - aChannel (ORSModel.ors.Channel) –
- inputROI (ORSModel.ors.ROI) –
Returns: output (ORSModel.ors.ROI) –
-
forwardSelectionFromRoi(self, linputChannelTraceForward: ORSModel.ors.Channel, inputROI: ORSModel.ors.ROI, outputROI: ORSModel.ors.ROI) → None¶ Parameters: - linputChannelTraceForward (ORSModel.ors.Channel) –
- inputROI (ORSModel.ors.ROI) –
- outputROI (ORSModel.ors.ROI) –
-
forwardSelectionFromRoiToDistance(self, linputChannelTraceForward: ORSModel.ors.Channel, inputROI: ORSModel.ors.ROI, outputROI: ORSModel.ors.ROI, distance: int) → None¶ Parameters: - linputChannelTraceForward (ORSModel.ors.Channel) –
- inputROI (ORSModel.ors.ROI) –
- outputROI (ORSModel.ors.ROI) –
- distance (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ TraceBackChannelAnalyzer.__init__() -> TraceBackChannelAnalyzer
-
selectPointFurtherOrNearerThanMinDistance(self, linputChannelTraceBack: ORSModel.ors.Channel, indices: int, indicesSize: int, minDistance: int, outputROI: ORSModel.ors.ROI, further: bool) → None¶ Parameters: - linputChannelTraceBack (ORSModel.ors.Channel) –
- indices (int) –
- indicesSize (int) –
- minDistance (int) –
- outputROI (ORSModel.ors.ROI) –
- further (bool) –
-
traceBackTotraceForward(self, linputChannelTraceBack: ORSModel.ors.Channel, loutputChannelTraceForward: ORSModel.ors.Channel) → None¶ Parameters: - linputChannelTraceBack (ORSModel.ors.Channel) –
- loutputChannelTraceForward (ORSModel.ors.Channel) –
-
tracebackCPU(self, linputChannelTraceBack: ORSModel.ors.Channel, inputROI: ORSModel.ors.ROI, outputROI: ORSModel.ors.ROI, outputVoteChannel: ORSModel.ors.Channel, gatherAlgo: bool) → ROI¶ Parameters: - linputChannelTraceBack (ORSModel.ors.Channel) –
- inputROI (ORSModel.ors.ROI) –
- outputROI (ORSModel.ors.ROI) –
- outputVoteChannel (ORSModel.ors.Channel) –
- gatherAlgo (bool) –
Returns: output (ORSModel.ors.ROI) –
-
tracebackPath(self, linputChannelTraceBack: ORSModel.ors.Channel, worldPosition: ORSModel.ors.Vector3, aPath: ORSModel.ors.VisualPath, pathWorldMatrix: ORSModel.ors.Matrix4x4, gatherAlgo: bool) → None¶ Parameters: - linputChannelTraceBack (ORSModel.ors.Channel) –
- worldPosition (ORSModel.ors.Vector3) –
- aPath (ORSModel.ors.VisualPath) –
- pathWorldMatrix (ORSModel.ors.Matrix4x4) –
- gatherAlgo (bool) –
-
Unmanaged¶
-
class
ORSModel.ors.Unmanaged¶ Bases:
ORSModel.ors.ORSBaseClassbrief_description: Abstract class for objects that are not managed by the core library. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005
-
atomicLoad(sFilename: str) → Unmanaged¶ Creates an object from a file where an object was saved.
Parameters: sFilename (str) – path of the file to load Returns: output (Unmanaged) – a managed object, or none() if the load fails
-
atomicSave(self, aFilename: str) → int¶ Saves the object to a file.
Parameters: aFilename (str) – path of the file to save Returns: output (int) – 0 if successful, otherwise an error code
-
createFromPythonRepresentation(aPythonRepresentation: str) → Unmanaged¶ Create aUnmanaged Object from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Unmanaged) –
-
classmethod
getAllSubclasses(outputCollection=None)¶
-
classmethod
getClassDenomination()¶
-
static
getClassFromProgId(progId)¶
-
getClassName(self) → str¶ Retrieves the class name of the core object wrapped by this Interface object.
Returns: output (str) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getIsInstanceOf(self, pProgId: str) → bool¶ Queries the object to know if it is an instance of a certain class.
Parameters: pProgId (str) – Returns: output (bool) –
-
classmethod
getIsSubclassOf(parentClass)¶
-
isNone(self) → bool¶ Checks if the receiver is none.
Returns: output (bool) –
-
isNotNone(self) → bool¶ Checks if the receiver is not none.
Returns: output (bool) –
-
none()¶ Unmanaged.__init__() -> Unmanaged
-
UnstructuredGrid¶
-
class
ORSModel.ors.UnstructuredGrid¶ Bases:
ORSModel.ors.Node-
getAllFeretDiameter(self, dMin: float, dMean: float, dMax: float, iTIndex: int, iAngleSampling: int) → bool¶ Get Sorted feret diameter.
Parameters: - dMin (float) – the T index (a uint32_t)
- dMean (float) – the angle sampling, steps between each angle iteration (a uint16_t)
- dMax (float) –
- iTIndex (int) –
- iAngleSampling (int) –
Returns: output (bool) – true if worked, else false (bool)
-
getBoundingBox(self, iTIndex: int, aWorldTransform: ORSModel.ors.Matrix4x4) → Box¶ Parameters: - iTIndex (int) –
- aWorldTransform (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Box) –
-
getBoundingBoxPlusEpsilon(timestep, worldMatrix, epsilon=0.01)¶
-
getCenterOfMass(self, iTIndex: int, aWorldTransform: ORSModel.ors.Matrix4x4) → Vector3¶ Parameters: - iTIndex (int) –
- aWorldTransform (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Vector3) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getClipBox(timestep=0, display=None)¶ Gets the clip box of the channel
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: aClipBox (ORSModel.ors.Box) – the clip box
-
getClosestVertexIndexToPoint(self, iTIndex: int, aWorldTransform: ORSModel.ors.Matrix4x4, pPoint: ORSModel.ors.Vector3) → int¶ Gets the index of the closest vertex to a given point.
Note
Return value is -1 if an error occurs of if mesh is empty.
Parameters: - iTIndex (int) – a view in which to test (a View)
- aWorldTransform (ORSModel.ors.Matrix4x4) – the point (an Vector3)
- pPoint (ORSModel.ors.Vector3) – true if coordinate is supplied in local coordinates, false if in world coordinates
Returns: output (int) – a vertex index (a int32_t)
-
getCurrentVertexScalarValuesSlot(self) → int¶ gets the current vertex scalar.
Note
The scalar index is zero-based, and thus should be less than getVertexScalarValuesSlotCount().
Returns: output (int) – the scalar slot index (an uint32_t)
-
getDefaultVertexAlphaColor(self) → float¶ Queries the unstructured grid to get its default alpha color.
Returns: output (float) – Default alpha color used for the unstructured grid (a double)
-
getDefaultVertexColor(self) → Color¶ Gets the vertex default color of the unstructured grid.
Note
Each color value goes between 0 (none) and 1 (full).
Returns: output (Color) – a color (an Color)
-
getFeretBox(self, iTIndex: int, iAngleSampling: int) → Box¶ Get Feret box.
Note
Default value for angle sampling is 5
Parameters: - iTIndex (int) – the T index (a uint32_t)
- iAngleSampling (int) – the angle sampling, steps between each angle iteration (a uint16_t)
Returns: output (Box) –
-
getHideOutOfRangeVertexScalarValues(self) → bool¶ Indicate if out of range values should be hiden.
Returns: output (bool) – (a bool)
-
getMinMaxVertexScalarValue(self, scalarValueSlotIndex: int, iTIndex: int, fMinValue: float, fMaxValue: float) → None¶ Parameters: - scalarValueSlotIndex (int) –
- iTIndex (int) –
- fMinValue (float) –
- fMaxValue (float) –
-
getMinimalBox(self, iTIndex: int) → Box¶ Get miminal box (also know as Oriented BoundingBox in litterature)
Parameters: iTIndex (int) – the T index (a uint32_t) Returns: output (Box) –
-
getMinimumBoundingBox(self, iTIndex: int, aWorldTransform: ORSModel.ors.Matrix4x4) → Box¶ Parameters: - iTIndex (int) –
- aWorldTransform (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Box) –
-
getMomentOfInertia(self, iTIndex: int, aWorldTransform: ORSModel.ors.Matrix4x4) → Matrix4x4¶ Parameters: - iTIndex (int) –
- aWorldTransform (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Matrix4x4) –
-
getTSize(self) → int¶ Gets the number of time steps for the mesh.
Returns: output (int) – a number (a uint32_t)
-
getUseDefaultVertexAlphaColor(self) → bool¶ Queries the unstructured grid to see if it uses its default alpha color.
Returns: output (bool) – TRUE if a default alpha color is used for the unstructured grid, FALSE otherwise
-
getUseDefaultVertexColor(self) → bool¶ Queries the unstructured grid to see if it uses its default color.
Returns: output (bool) – TRUE if the unstructured grid uses its default color, FALSE otherwise
-
getUseVertexScalarValues(self) → bool¶ Sets the mesh to have vertex scalar values or not.
Returns: output (bool) – true to use scalar values, false otherwise
-
getVertexAtIndex(self, iTIndex: int, vertexIndex: int, x: float, y: float, z: float) → None¶ Gets a specific vertex.
Parameters: - iTIndex (int) – the time step (a uint32_t)
- vertexIndex (int) – the vertex index (an uint64_t )
- x (float) – the X value (a double*)
- y (float) – the Y value (a double*)
- z (float) – the Z value (a double*)
-
getVertexCount(self, iTIndex: int) → int¶ Returns the number of vertices.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (int) – an uint64_t
-
getVertexDatatype(self) → int¶ Returns: output (int) –
-
getVertexScalarValue(self, scalarValueSlotIndex: int, scalarValueVertexIndex: int, iTIndex: int) → float¶ Gets the value of a vertex scalar.
Parameters: - scalarValueSlotIndex (int) – the scalar slot index (an uint32_t)
- scalarValueVertexIndex (int) – the vertex index (an uint32_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the value of a vertex scalar (a float)
-
getVertexScalarValueDescription(self, scalarValueSlotIndex: int, iTIndex: int) → str¶ Parameters: - scalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (str) –
-
getVertexScalarValueMax(self, scalarValueSlotIndex: int, iTIndex: int) → float¶ method getVertexScalarValueMax
Parameters: - scalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (float) –
-
getVertexScalarValueMaxs(self, iTIndex: int) → ArrayDouble¶ method getVertexScalarValueMaxs
Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getVertexScalarValueMin(self, scalarValueSlotIndex: int, iTIndex: int) → float¶ method getVertexScalarValueMin
Parameters: - scalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (float) –
-
getVertexScalarValueMins(self, iTIndex: int) → ArrayDouble¶ method getVertexScalarValueMins
Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getVertexScalarValueOffset(self, scalarValueSlotIndex: int, iTIndex: int) → float¶ Gets a vertex scalar offset value.
Parameters: - scalarValueSlotIndex (int) – the scalar slot index (an uint32_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar offset value (a float)
-
getVertexScalarValueOffsets(self, iTIndex: int) → ArrayDouble¶ Get the vertex scalar offset values.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayDouble) – the scalar offset value (a float)
-
getVertexScalarValueSlope(self, scalarValueSlotIndex: int, iTIndex: int) → float¶ Get a vertex scalar slope value.
Parameters: - scalarValueSlotIndex (int) – the scalar slot index (an uint32_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – the scalar slope value (a float)
-
getVertexScalarValueSlopes(self, iTIndex: int) → ArrayDouble¶ Get the vertex scalar slope values.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayDouble) – the scalar slope value (a float)
-
getVertexScalarValueSlotLookUpTable(self, nScalarValueSlotIndex: int, iTIndex: int) → dict¶ Parameters: - nScalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (dict) –
-
getVertexScalarValueUnit(self, scalarValueSlotIndex: int, iTIndex: int) → int¶ Parameters: - scalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (int) –
-
getVertexScalarValues(self, iSlotIndex: int, iTIndex: int) → Array¶ Gets the values of a vertex scalar.
Note
The array of values is of length getVertexCount() * getVertexScalarValuesSlotCount().
Note
The scalar value in the slot s of the vertex v is located at the index (getVertexScalarValuesSlotCount() * v) + s of the array.
Parameters: - iSlotIndex (int) – the time step (a uint32_t)
- iTIndex (int) –
Returns: output (ORSModel.ors.Array) – an array of values (an ArrayFloat)
-
getVertexScalarValuesDatatype(self, iSlotIndex: int, iTIndex: int) → int¶ Parameters: - iSlotIndex (int) –
- iTIndex (int) –
Returns: output (int) –
-
getVertexScalarValuesRangeBoundaryMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a vertex scalar range max boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getVertexScalarValuesRangeBoundaryMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a vertex scalar range min boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getVertexScalarValuesRangeMax(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a vertex scalar range max value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getVertexScalarValuesRangeMin(self, nScalarValueSlotIndex: int, iTIndex: int) → float¶ Get a vertex scalar range min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
Returns: output (float) – a double
-
getVertexScalarValuesSlotCount(self) → int¶ Gets the number of slots for vertex scalar values.
Returns: output (int) – the number of slots (an uint32_t)
-
getVertexScalarValuesWindowMax(self, scalarValueSlotIndex: int, iTIndex: int) → float¶ Parameters: - scalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (float) –
-
getVertexScalarValuesWindowMaxs(self, iTIndex: int) → ArrayDouble¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getVertexScalarValuesWindowMin(self, scalarValueSlotIndex: int, iTIndex: int) → float¶ Parameters: - scalarValueSlotIndex (int) –
- iTIndex (int) –
Returns: output (float) –
-
getVertexScalarValuesWindowMins(self, iTIndex: int) → ArrayDouble¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.ArrayDouble) –
-
getVertices(self, iTIndex: int) → Array¶ Gets the vertices.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.Array) – an array of float (an ArrayFloat)
-
mapScalarValuesFromAMultiROI(self, referenceMultiROI: ORSModel.ors.MultiROI, multiROIScalarValueSlotIndex: int, sourceScalarValuesSlotIndex: int, multiROITIndex: int, sourceTIndex: int, aDefaultScalarValue: float) → None¶ Map a scalar values slot from aMultiROI to a unstructured grid.
Parameters: - referenceMultiROI (ORSModel.ors.MultiROI) – the multiROI modele (an MultiROI)
- multiROIScalarValueSlotIndex (int) – the index of the MultiROI scalar values slot to map (a uint16_t)
- sourceScalarValuesSlotIndex (int) – the index of the destination scalar values lot (a uint16_t)
- multiROITIndex (int) – the multiROI time step (a uint32_t)
- sourceTIndex (int) – the unstructured grid time step (a uint32_t)
- aDefaultScalarValue (float) – a default scalar value in case that no match is possible for a vertex between the structured grid and the MultiROI (a double)
-
none()¶ UnstructuredGrid.__init__() -> UnstructuredGrid
-
offsetVertices(self, x: float, y: float, z: float) → None¶ Offsets the mesh vertices.
Note
Each vertice is offset by the given relative coordinates.
Parameters: - x (float) – an X offset value (a double)
- y (float) – a Y offset value (a double)
- z (float) – a Z offset value (a double)
-
removeAVertexScalarValuesSlot(self, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Remove a scalar slot from the vertex scalars values slot.
Parameters: - nScalarValueSlotIndex (int) – the index of the slot to be removed (a uint16_t)
- iTIndex (int) – the time step (a uint32_t)
-
setCurrentVertexScalarValuesSlot(self, nCurrentScalarValueSlotIndex: int) → None¶ Sets the current vertex scalar.
Note
The scalar index is zero-based, and thus should be less than getVertexScalarValuesSlotCount().
Parameters: nCurrentScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
-
setDefaultVertexAlphaColor(self, value: float) → None¶ Sets the unstructured grid its default alpha color.
Parameters: value (float) – Alpha color (double)
-
setDefaultVertexColor(self, color: ORSModel.ors.Color) → None¶ Sets the vertex default color of the unstructured grid.
Note
Each color value goes between 0 (none) and 1 (full).
Note
You need to call getUseDefaultVertexColor(true) for the default color to be used.
Note
You need to call initializeVisual after color changes for them to be visible on the screen.
Parameters: color (Color) – a color (an Color)
-
setHideOutOfRangeVertexScalarValues(self, value: bool) → None¶ Indicate if out of range values should be hiden.
Parameters: value (bool) –
-
setOutOfRangeScalarValue(self, value: float) → None¶ Sets a scalar out or range value.
Parameters: value (float) – the value (a float)
-
setTSize(self, tSize: int) → None¶ Sets the number of time steps for the mesh.
Parameters: tSize (int) – a number (a uint32_t)
-
setUseDefaultVertexAlphaColor(self, value: bool) → None¶ Sets the unstructured grid to use its default alpha color.
Parameters: value (bool) – TRUE for using a default alpha color for the unstructured grid, FALSE otherwise (bool)
-
setUseDefaultVertexColor(self, value: bool) → None¶ Sets the unstructured grid to use its vertex default color.
Parameters: value (bool) – TRUE to use the default color, FALSE otherwise
-
setUseVertexScalarValues(self, value: bool) → None¶ Gets the status of vertex scalar values usage.
Parameters: value (bool) –
-
setVertexAtIndex(self, iTIndex: int, vertexIndex: int, x: float, y: float, z: float) → None¶ Sets a specific vertex.
Parameters: - iTIndex (int) – the time step (a uint32_t)
- vertexIndex (int) – the vertex index (an uint64_t)
- x (float) – the X value (a double)
- y (float) – the Y value (a double)
- z (float) – the Z value (a double)
-
setVertexDatatype(self, nVertexDatatype: int) → None¶ Parameters: nVertexDatatype (int) –
-
setVertexScalarValue(self, scalarValueSlotIndex: int, scalarValueVertexIndex: int, aValue: float, iTIndex: int) → None¶ Sets the value of a vertex scalar.
Parameters: - scalarValueSlotIndex (int) – the scalar slot index (an uint32_t)
- scalarValueVertexIndex (int) – the vertex index (an uint32_t)
- aValue (float) – the value of a vertex scalar to set (a float)
- iTIndex (int) – the time step (a uint32_t)
-
setVertexScalarValueDescription(self, scalarValueSlotIndex: int, value: str, iTIndex: int) → None¶ Parameters: - scalarValueSlotIndex (int) –
- value (str) –
- iTIndex (int) –
-
setVertexScalarValueMax(self, scalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ method setVertexScalarValueMax
Parameters: - scalarValueSlotIndex (int) –
- value (float) –
- iTIndex (int) –
-
setVertexScalarValueMaxs(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ method setVertexScalarValueMaxs
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setVertexScalarValueMin(self, scalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ method setVertexScalarValueMin
Parameters: - scalarValueSlotIndex (int) –
- value (float) –
- iTIndex (int) –
-
setVertexScalarValueMins(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ method setVertexScalarValueMins
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setVertexScalarValueOffset(self, scalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Sets a vertex scalar offset value.
Parameters: - scalarValueSlotIndex (int) – the scalar slot index (an uint32_t)
- value (float) – the scalar offset value (a float)
- iTIndex (int) – the time step (a uint32_t)
-
setVertexScalarValueOffsets(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Set the vertex scalar offset values.
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) – scalar offset value (a float)
- iTIndex (int) – time step (a uint32_t)
-
setVertexScalarValueSlope(self, scalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a vertex scalar slope value.
Parameters: - scalarValueSlotIndex (int) – scalar slot index (an uint32_t)
- value (float) – scalar slope value (a float)
- iTIndex (int) – time step (a uint32_t)
-
setVertexScalarValueSlopes(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Set the vertex scalar slope values.
Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) – scalar slope value (a float)
- iTIndex (int) – time step (a uint32_t)
-
setVertexScalarValueSlotLookUpTable(self, lookUpTable: dict, nScalarValueSlotIndex: int, iTIndex: int) → None¶ Parameters: - lookUpTable (dict) –
- nScalarValueSlotIndex (int) –
- iTIndex (int) –
-
setVertexScalarValueUnit(self, scalarValueSlotIndex: int, value: int, iTIndex: int) → None¶ Parameters: - scalarValueSlotIndex (int) –
- value (int) –
- iTIndex (int) –
-
setVertexScalarValues(self, pScalarValues: ORSModel.ors.Array, iSlotIndex: int, iTIndex: int) → None¶ Sets the values of a vertex scalar.
Note
The array of values is of length getVertexCount() * getVertexScalarValuesSlotCount().
Note
The scalar value in the slot s of the vertex v is located at the index (getVertexScalarValuesSlotCount() * v) + s of the array.
Parameters: - pScalarValues (ORSModel.ors.Array) – an array of values (an ArrayFloat)
- iSlotIndex (int) – the the time step (a uint32_t)
- iTIndex (int) –
-
setVertexScalarValuesDatatype(self, iSlotIndex: int, iTIndex: int, nVertexScalarValuesDatatype: int) → None¶ Parameters: - iSlotIndex (int) –
- iTIndex (int) –
- nVertexScalarValuesDatatype (int) –
-
setVertexScalarValuesRangeBoundaryMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a vertex scalar range max boundary value.
Parameters: - nScalarValueSlotIndex (int) – the slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setVertexScalarValuesRangeBoundaryMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a vertex scalar range min boundary value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setVertexScalarValuesRangeMax(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a vertex scalar range max value.
Parameters: - nScalarValueSlotIndex (int) – the slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setVertexScalarValuesRangeMin(self, nScalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Set a vertex scalar range min value.
Parameters: - nScalarValueSlotIndex (int) – the scalar slot index (a uint16_t)
- value (float) – the value (a double)
- iTIndex (int) – the time step (a uint32_t)
-
setVertexScalarValuesSlotCount(self, value: int) → None¶ Sets the number of slots for vertex scalar values.
Parameters: value (int) – the number of slots (an uint32_t)
-
setVertexScalarValuesWindowMax(self, scalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Parameters: - scalarValueSlotIndex (int) –
- value (float) –
- iTIndex (int) –
-
setVertexScalarValuesWindowMaxs(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setVertexScalarValuesWindowMin(self, scalarValueSlotIndex: int, value: float, iTIndex: int) → None¶ Parameters: - scalarValueSlotIndex (int) –
- value (float) –
- iTIndex (int) –
-
setVertexScalarValuesWindowMins(self, pScalarValues: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Parameters: - pScalarValues (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
-
setVertices(self, pVertices: ORSModel.ors.Array, iTIndex: int) → None¶ Sets the vertices.
Parameters: - pVertices (ORSModel.ors.Array) – the vertices(an ArrayFloat)
- iTIndex (int) – the time step (a uint32_t)
-
toWorld(iTIndex, setDataDirty=True)¶
-
Vector3¶
-
class
ORSModel.ors.Vector3¶ Bases:
ORSModel.ors.Unmanagedbrief_description: A wrapper to a 3D vector. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005
-
add(self, aVector: ORSModel.ors.Vector3) → None¶ Adds a vector to the receiver.
Parameters: aVector (ORSModel.ors.Vector3) – a vector (an Vector3)
-
copy(self) → Vector3¶ Returns a new vector identical to the receiver (a copy).
Returns: output (ORSModel.ors.Vector3) –
-
createFromPythonRepresentation(aPythonRepresentation: str) → Vector3¶ Create aUnmanaged Object from a python representation a static method.
Parameters: aPythonRepresentation (str) – Returns: output (ORSModel.ors.Vector3) –
-
fromPythonRepresentation(self, aPythonRepresentation: str) → bool¶ Parameters: aPythonRepresentation (str) – Returns: output (bool) –
-
getAPerpendicular(self) → Vector3¶ Computes a perpendicular from the vector.
Returns: output (ORSModel.ors.Vector3) – a perpendicular vector (an Vector3)
-
getAdditionWith(self, aVector: ORSModel.ors.Vector3) → Vector3¶ Gets the result of adding a vector to the receiver.
Note
The receiver is not modified.
Parameters: aVector (ORSModel.ors.Vector3) – a vector (an Vector3) Returns: output (ORSModel.ors.Vector3) – the resulting vector (an Vector3)
-
getAngleWith(self, pVect: ORSModel.ors.Vector3) → float¶ Computes the angle with another vector.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3) Returns: output (float) – the angle (a double)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCrossProductWith(self, pVect: ORSModel.ors.Vector3) → Vector3¶ Computes the cross product with another vector.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3) Returns: output (ORSModel.ors.Vector3) – the cross product (a double)
-
getDistanceFrom(self, pVect: ORSModel.ors.Vector3) → float¶ Computes the distance to another vector.
Parameters: pVect (ORSModel.ors.Vector3) – another vector (an Vector3) Returns: output (float) – the distance (a double)
-
getDotProductWith(self, pVect: ORSModel.ors.Vector3) → float¶ Computes the dot product with another vector.
Parameters: pVect (ORSModel.ors.Vector3) – a vector (an Vector3) Returns: output (float) – the dot product (a double)
-
getIsEqualTo(self, aVector: ORSModel.ors.Vector3) → bool¶ Parameters: aVector (ORSModel.ors.Vector3) – Returns: output (bool) –
-
getLargestComponent(self) → float¶ Returns: output (float) – the biggest component of the vector
-
getLength(self) → float¶ Gets the vector’s length.
Returns: output (float) – the length (a double)
-
getLinearInterpolationWith(self, point1: ORSModel.ors.Vector3, normalizePosition: float) → Vector3¶ Computes the lerp with another vector.
Parameters: - point1 (ORSModel.ors.Vector3) – a vector (an Vector3)
- normalizePosition (float) – a interpolation factor [0,1](a double)
Returns: output (ORSModel.ors.Vector3) – the lerp vector (an Vector3)
-
getNegated(self) → Vector3¶ Gets the receiver negated in a new vector.
Note
The receiver is not modified.
Returns: output (ORSModel.ors.Vector3) – the resulting vector (an Vector3)
-
getNormalized(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getPhi(self) → float¶ Gets the angle from the positive x axis of the current vector projected on the xy plane.
Note
Equivalent to atan(y/x), where the provided result is in the range [0, 2*pi[.
Note
The vector should be normalized.
Returns: output (float) – the angle in radians (a double)
-
getPythonRepresentation(self) → str¶ Returns: output (str) –
-
getRotatedAroundAxis(self, anAxis: ORSModel.ors.Vector3, centerOfRotation: ORSModel.ors.Vector3, angleInRadian: float) → Vector3¶ Return the receiver rotated around the provided axis for the provided amount of radian.
Parameters: - anAxis (ORSModel.ors.Vector3) – an axis vector (an Vector3)
- centerOfRotation (ORSModel.ors.Vector3) – an centerOfRotation vector (an Vector3)
- angleInRadian (float) – an angle in radian (a double)
Returns: output (ORSModel.ors.Vector3) – the product of the rotation (an Vector3)
-
getScaledBy(self, scaleFactor: float) → Vector3¶ Gets the result of sacling a vector to the receiver.
Note
The receiver is not modified.
Parameters: scaleFactor (float) – a scale a double Returns: output (ORSModel.ors.Vector3) – the resulting vector (an Vector3)
-
getSmallestComponent(self) → float¶ Returns: output (float) – the smallest component of the vector
-
getSubtractionFrom(self, aVector: ORSModel.ors.Vector3) → Vector3¶ Gets the result of subtracting a vector from the receiver.
Note
The receiver is not modified.
Parameters: aVector (ORSModel.ors.Vector3) – a vector (an Vector3) Returns: output (ORSModel.ors.Vector3) – the resulting vector (an Vector3)
-
getTheta(self) → float¶ Gets the angle from the positive z axis.
Note
Equivalent to acos(z), where the provided result is in the range [0, pi].
Note
The vector should be normalized.
Returns: output (float) – the angle in radians (a double)
-
getX(self) → float¶ Gets the X value from the vector.
Returns: output (float) – a double
-
getY(self) → float¶ Gets the Y value from the vector.
Returns: output (float) – a double
-
getZ(self) → float¶ Gets the Z value from the vector.
Returns: output (float) – a double
-
is_(another)¶
-
is_not(another)¶
-
negate(self) → None¶ Negates the vector.
-
none()¶ Vector3.__init__() -> Vector3
-
normalize(self) → None¶ Normalizes the vector.
Note
A normalized vector has norm (length) 1.
-
scale(self, scaleFactor: float) → None¶ Scales the vector.
Parameters: scaleFactor (float) – a scale factor (a double)
-
setX(self, value: float) → None¶ Sets the X value of the vector.
Parameters: value (float) – a double value
-
setXYZ(self, x: float, y: float, z: float) → None¶ Sets the 3 vector component.
Note
W is set to zero
Parameters: - x (float) – the X component (a double)
- y (float) – the Y component (a double)
- z (float) – the Z component (a double)
-
setY(self, value: float) → None¶ Sets the Y value of the vector.
Parameters: value (float) – a double value
-
setZ(self, value: float) → None¶ Sets the Z value of the vector.
Parameters: value (float) – a double value
-
subtract(self, aVector: ORSModel.ors.Vector3) → None¶ Subtracts a vector from the receiver.
Parameters: aVector (ORSModel.ors.Vector3) – a vector (an Vector3)
-
VectorField¶
-
class
ORSModel.ors.VectorField¶ Bases:
ORSModel.ors.UnstructuredGrid-
copyInto(self, aDestinationUnstructuredGrid: ORSModel.ors.Node) → None¶ Copies the receiver unstructured grid into another unstructured grid.
Parameters: aDestinationUnstructuredGrid (ORSModel.ors.Node) – a destination unstructured grid
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getUnstructuredGridHelperClass()¶
-
getVectorAtIndex(self, iTIndex: int, vertexIndex: int, x: float, y: float, z: float) → None¶ Gets a specific vector.
Parameters: - iTIndex (int) – the time step (a uint32_t)
- vertexIndex (int) – the vertex index (an uint64_t )
- x (float) – the X value (a double*)
- y (float) – the Y value (a double*)
- z (float) – the Z value (a double*)
-
getVectors(self, iTIndex: int) → ArrayDouble¶ Gets the vectors.
Parameters: iTIndex (int) – the time step (a uint32_t) Returns: output (ORSModel.ors.ArrayDouble) – an array of double (an ArrayDouble)
-
none() → VectorField¶ Returns a none object, equivalent to a non-existent object (or null).
Returns: output (VectorField) –
-
setVectorAtIndex(self, iTIndex: int, vertexIndex: int, x: float, y: float, z: float) → None¶ Sets a specific vector.
Parameters: - iTIndex (int) – the time step (a uint32_t)
- vertexIndex (int) – the vertex index (an uint64_t)
- x (float) – the X value of the vector (a double)
- y (float) – the Y value of the vector (a double)
- z (float) – the Z value of the vector(a double)
-
setVectors(self, pVectors: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Sets the vectors.
Parameters: - pVectors (ORSModel.ors.ArrayDouble) – the vectors(an ArrayDouble)
- iTIndex (int) – the time step (a uint32_t)
-
View¶
-
class
ORSModel.ors.View¶ Bases:
ORSModel.ors.Nodebrief_description: Represents a host window where the renderer is displayed. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 Represents a host window where the renderer is displayed.
-
compile(self) → None¶
-
decrementTimeStep(self) → None¶ Decrements the view’s time step counter.
Note
When looking at 4D data (3D plus a time dimension), one can cycle through the time dimension in this fashion.
-
draw(self) → None¶ Forces an immediate draw of the view.
-
drawOnCurrentGLContext(self, bCapture: bool) → None¶ Parameters: bCapture (bool) –
-
exportSnapshotCustomSized(self, iWidth: int, iHeight: int, pOutputImage: ORSModel.ors.Image) → Image¶ Exports a snapshot of the view to an image, sized to specification.
Note
This method saves a snapshot sized to specifications. The resulting image is always full resolution, no matter what size is given.
Note
If an output image is support, the resulting snapshot is written to that output image. That same output image will be the return value.
Parameters: - iWidth (int) – the width of the image to be saved (a uint16_t)
- iHeight (int) – the height of the image to be saved (a uint16_t)
- pOutputImage (ORSModel.ors.Image) – (optional) an output image (an Image)
Returns: output (ORSModel.ors.Image) – an image (an Image)
-
fitBoundedPlaneInView(self, IBoundedPlane: ORSModel.ors.Rectangle) → None¶ Parameters: IBoundedPlane (ORSModel.ors.Rectangle) –
-
fitBoundedPlaneInViewLogged(rectangle, logging=True)¶
-
fitBoxInView(self, aBox: ORSModel.ors.Box) → None¶ Parameters: aBox (ORSModel.ors.Box) –
-
fitBoxInViewLogged(box, logging=True)¶
-
gatherTimeStepMaxFromAll(self) → None¶ Queries all visible models to know how many timesteps there are.
-
get2DBackgroundColor(self) → Color¶ Gets the view’s 3D first background color.
Returns: output (ORSModel.ors.Color) – a color (an Color)
-
get3DBackgroundColor1(self) → Color¶ Gets the view’s 3D first background color.
Returns: output (ORSModel.ors.Color) – a color (an Color)
-
get3DBackgroundColor2(self) → Color¶ Gets the view’s 3D first background color.
Returns: output (ORSModel.ors.Color) – a color (a Color)
-
get3DBackgroundColorMode(self) → int¶ Gets the view’s 3D background color mode.
Note
The color mode has 3 different meanings: -2 says the color is uniform (i.e. the second color is ignored), -1 says the color is gradient radial (the two colors are used), any value between 0 and 359 says the color is gradient linear (the two colors are used), and that value indicates the angle of the gradient.
Returns: output (int) – color mode (a short, see note below)
-
getAllChildrenOfClassesVisibleAndHighlightable(self, classes: ORSModel.ors.typing.List[str]) → List¶ Returns a flattened list of all the child nodes, of the given class, that are renderable and highlightable.
Note
The list contains only Managed objects (they will need to be typecast to the appropriate class).
Parameters: classes (typing.List[str]) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.List) – a list of all child nodes that can be rendered (an List)
-
getAllVisibleChildrenOfClass(self, pProgId: str) → List¶ Returns a flattened list of all the child nodes, of the given class, that are visible.
Note
The list contains only Managed objects (they will need to be typecast to the appropriate class).
Parameters: pProgId (str) – the ProgId of the class to test against (a string) Returns: output (ORSModel.ors.List) – a list of all child nodes that are visible (an List)
-
getAmbientLightColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getAngleDimensionUnit(self) → DimensionUnit¶ Returns: output (ORSModel.ors.DimensionUnit) –
-
getAutoFocus(self) → bool¶ Returns: output (bool) –
-
getBorderColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getBorderWidth(self) → float¶ Returns: output (float) –
-
getBoundedPlaneOfFirstSliceOfBox(self, aBox: ORSModel.ors.Box) → Rectangle¶ Parameters: aBox (ORSModel.ors.Box) – Returns: output (ORSModel.ors.Rectangle) –
-
getBoundedPlaneOfLastSliceOfBox(self, aBox: ORSModel.ors.Box) → Rectangle¶ Parameters: aBox (ORSModel.ors.Box) – Returns: output (ORSModel.ors.Rectangle) –
-
getBoundedPlaneOfSliceOfBox(self, aBox: ORSModel.ors.Box, sliceIndex: int) → Rectangle¶ Parameters: - aBox (ORSModel.ors.Box) –
- sliceIndex (int) –
Returns: output (ORSModel.ors.Rectangle) –
-
getBoxAbleToContainAllEnabledVisualReachableByRender(self, inbox: ORSModel.ors.Box) → Box¶ Parameters: inbox (ORSModel.ors.Box) – Returns: output (ORSModel.ors.Box) –
-
getCamera(self) → Camera¶ Gets the picked Overlay in a view.
Returns: output (ORSModel.ors.Camera) – the GUID of the overlay if successful, should be a VisualOVerlay but this idl doesn’t allow it
-
getCameraSpaceLightPos(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getCineMode(self) → int¶ Returns: output (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getContext()¶
-
getCurrentTimeStep(self) → int¶ Gets the view’s current time step.
Returns: output (int) –
-
getDiffuseFactor(self) → float¶ Returns: output (float) –
-
getDiffuseLightColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getDimensionUnit(self, dimensionType: int) → DimensionUnit¶ Gets the view’s dimension unit.
Note
See the ORS_def.h file for enum CxvUniverse_Dimension_type values.
Parameters: dimensionType (int) – the unit type (a CxvUniverse_Dimension_type) Returns: output (ORSModel.ors.DimensionUnit) – the current dimension unit (DimensionUnit)
-
getDimensionUnitID(self, dimensionType: int) → int¶ Gets the view’s dimension unit.
Note
To obtain the object, call DimensionUnit::getUnitFor().
Note
See the ORS_def.h file for enum CxvUniverse_Dimension and CxvUniverse_Dimension_type values.
Parameters: dimensionType (int) – the unit type (a CxvUniverse_Dimension_type) Returns: output (int) – the current CxvUniverse_Dimension unit (a int32_t)
-
getDisplayedAxis(self, aBox: ORSModel.ors.Box) → int¶ Gets the axis direction of the view.
Note
The axis value is 0 for Sagittal, 1 for Coronal or 2 for Axial.
Parameters: aBox (ORSModel.ors.Box) – Returns: output (int) – the axis (a uint16_t)
-
getDrawFocusRect(self) → bool¶ Returns: output (bool) –
-
getEnableFocus(self) → bool¶ Returns: output (bool) –
-
getFitToViewBorder(self) → int¶ Gets the number of pixels allocated to the border around the view.
Returns: output (int) – the number of pixels (a int32_t)
-
getFocalDistance(self) → float¶ Returns: output (float) –
-
getFocusSigma(self) → float¶ Returns: output (float) –
-
getHWND(self) → int¶ Gets the view handle.
Returns: output (int) – the handle of the window (a ORS_COM_ARG)
-
getImageNumberingAscending(self) → bool¶ Returns: output (bool) –
-
getIntersliceDistance(self, box: ORSModel.ors.Box) → float¶ Parameters: box (ORSModel.ors.Box) – Returns: output (float) –
-
getIsBorderEnabled(self) → bool¶ Returns: output (bool) –
-
getIsChildReachableByRenderer(self, INode: ORSModel.ors.Node) → bool¶ Verifies if a child node is renderable.
Parameters: INode (ORSModel.ors.Node) – a node in the child hierarchy of the view (a Node) Returns: output (bool) – true if the node is renderable, false otherwise
-
getIsEnabled(self) → bool¶ Queries the view to know if it is enabled.
Note
Disabled views are “inert”, they react to very few events and display nothing.
Returns: output (bool) – true if the view is enabled, false otherwise
-
getIsIn2DViewMode(self) → bool¶ Returns: output (bool) –
-
getIsIn3DViewMode(self) → bool¶ Returns: output (bool) –
-
getIsInAcquisitionPlaneOf(self, aChannel: ORSModel.ors.Channel) → bool¶ Parameters: aChannel (ORSModel.ors.Channel) – Returns: output (bool) –
-
getIsInNoViewMode(self) → bool¶ Returns: output (bool) –
-
getIsInThinMIPViewMode(self) → bool¶ Returns: output (bool) –
-
getIsOrientationAndPositionLocked(self) → bool¶ Gets the view’s position and orientation lock status.
Note
When a view position is locked, one cannot set its oblique info.
Returns: output (bool) – true if the view position and orientation is locked, false otherwise
-
getIsOrientationLocked(self) → bool¶ Gets the view’s orientation lock status.
Note
When a view orientation is locked, one cannot set its oblique info.
Returns: output (bool) – true if the view orientation is locked, false otherwise
-
getIsOrthoProjection(self) → bool¶ Returns: output (bool) –
-
getIsPositionLocked(self) → bool¶ Gets the view’s position lock status.
Note
When a view position is locked, one cannot set its oblique info.
Returns: output (bool) – true if the view position is locked, false otherwise
-
getIsRenderingTiled(self) → bool¶ Returns: output (bool) –
-
getIsShadowEnabled(self) → bool¶ Returns: output (bool) –
-
getIsTrackingLight(self) → bool¶ Queries if the view is in tracking light mode or not.
Returns: output (bool) – true if the view is in tracking light mode, false otherwise
-
getLODEnabled(self) → bool¶ Returns: output (bool) –
-
getLODMode(self) → int¶ Gets the view LOD mode.
Note
LOD stands for Level Of Detail. It defines how much detail is displayed when moving the visual artifacts in the view. The lower the level, the faster the visual will move.
Note
See the ORS_def.h file, it contains defines (in the form CXV_DISPLAY_LOD_XXX) for valid values.
Returns: output (int) – an LOD mode (a int32_t)
-
getLayoutGenealogicalName()¶ Gets the genealogical name of the view
Returns: aName (str) – the genealogical name of the view
-
getLengthAsPixelCount(self, aLength: float) → float¶ Gets the number of pixels on the screen that represent a world length.
Parameters: aLength (float) – the world length (a double) Returns: output (float) – the number of pixels that match the length (a double)
-
getLengthDimensionUnit(self) → DimensionUnit¶ Returns: output (ORSModel.ors.DimensionUnit) –
-
getLightFollowCamera(self) → bool¶ Returns: output (bool) –
-
getLightMaxDistance(self) → float¶ Returns: output (float) –
-
getLightPosition(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getLocalPositionArrayTransformedToXY(self, pVisual: ORSModel.ors.Visual, pLocalPositions: ORSModel.ors.SequenceableCollection, nPtsCount: int, pTimeStep: int, pOutputXYPositions: ORSModel.ors.SequenceableCollection) → SequenceableCollection¶ Parameters: - pVisual (ORSModel.ors.Visual) –
- pLocalPositions (ORSModel.ors.SequenceableCollection) –
- nPtsCount (int) –
- pTimeStep (int) –
- pOutputXYPositions (ORSModel.ors.SequenceableCollection) –
Returns: output (ORSModel.ors.SequenceableCollection) –
-
getLocalPositionFromVisualLocalPosition(self, pVisual: ORSModel.ors.Visual, anotherVisual: ORSModel.ors.Visual, pAlocalPositionInAnotherVisual: ORSModel.ors.Vector3, pTimeStep: int) → Vector3¶ Parameters: - pVisual (ORSModel.ors.Visual) –
- anotherVisual (ORSModel.ors.Visual) –
- pAlocalPositionInAnotherVisual (ORSModel.ors.Vector3) –
- pTimeStep (int) –
Returns: output (ORSModel.ors.Vector3) –
-
getLocalPositionFromWorldPosition(self, pVisual: ORSModel.ors.Visual, pWorldPosition: ORSModel.ors.Vector3, pTimeStep: int) → Vector3¶ Parameters: - pVisual (ORSModel.ors.Visual) –
- pWorldPosition (ORSModel.ors.Vector3) –
- pTimeStep (int) –
Returns: output (ORSModel.ors.Vector3) –
-
getLocalPositionTransformedToXY(self, IVisual: ORSModel.ors.Visual, pCoord: ORSModel.ors.Vector3, pTimeStep: int, oX: float, oY: float) → bool¶ Transforms a local coordinate in 2D coordinates.
Note
The values are returned in the last two parameters supplied.
Parameters: - IVisual (ORSModel.ors.Visual) – the visual (an Visual)
- pCoord (ORSModel.ors.Vector3) – a coordinate (an Vector3)
- oY (float) –
Returns: - output (bool) – true if the local Z coordinate is currently visible, false otherwise
- pTimeStep (int) – the X 2D coordinate (a double*)
- oX (float) – the Y 2D coordinate (a double*)
-
getMaxTimeStep(self) → int¶ Returns: output (int) –
-
getMillisecondsElapsedSinceLastDraw(self) → int¶ Returns the time elapsed since the last draw, in milliseconds.
Returns: output (int) – the elapsed time, in milliseconds (a uint32_t)
-
getNeedRefresh(self) → bool¶ Returns: output (bool) –
-
getNextSliceDirectionOfBox(self, aBox: ORSModel.ors.Box) → Vector3¶ Parameters: aBox (ORSModel.ors.Box) – Returns: output (ORSModel.ors.Vector3) –
-
getOrthoZoomFactor(self) → float¶ Returns: output (float) –
-
getPickData(self, pixelXPositionInDisplay: int, pixelYPositionInDisplay: int) → Intersection¶ Gets the object being picked in the view.
Note
Returns an intersection describing what is currently under the mouse cursor in the view.
Parameters: - pixelXPositionInDisplay (int) –
- pixelYPositionInDisplay (int) –
Returns: output (ORSModel.ors.Intersection) – an intersection (an Intersection)
-
getPickVisualData(self, aIVisual: ORSModel.ors.Visual, pixelXPositionInDisplay: int, pixelYPositionInDisplay: int) → Intersection¶ Gets the pick region from a visual in the view.
Note
Returns an intersection describing what is currently being picked in the visual supplied. If the given visual is not being picked, getHit() on the intersection will return FALSE.
Parameters: - aIVisual (ORSModel.ors.Visual) – a visual (an Visual)
- pixelXPositionInDisplay (int) –
- pixelYPositionInDisplay (int) –
Returns: output (ORSModel.ors.Intersection) – an intersection (an Intersection)
-
getProjectionMatrix(self) → Matrix4x4¶ Returns: output (ORSModel.ors.Matrix4x4) –
-
getProjectionMode2D(self) → int¶ Gets the 2D projection mode of the view.
Note
See CxvVolumeProjection_Mode in ORS_def.h for supported volume projection modes.
Returns: output (int) – the current 2D projection mode (an int)
-
getRectangle()¶ Get the rectangle in the space defined by the View
Returns: rectangle (ORSModel.ors.Rectangle) – a Rectangle
-
getRenderCount(self) → int¶ Returns the number of times theView was rendered (draw)
Returns: output (int) – the rendereing count (unint32)
-
getRenderMode(self) → int¶ Gets the view render mode.
Returns: output (int) – a render mode (a uint16_t, see ors_def.h)
-
getRestTime(self) → int¶ Gets the rendering idle time.
Note
The rendering idle time is the period of time between cycles. Increasing this value makes the renderer less responsive.
Note
Default value is 22 ms.
Returns: output (int) – a number of milliseconds (a LONG)
-
getScreenLengthTransformedToWorldLength(self, inLength: float) → float¶ Parameters: inLength (float) – Returns: output (float) –
-
getShadowMapSize(self) → int¶ Returns: output (int) –
-
getShadowOpacity(self) → float¶ Returns: output (float) –
-
getShadowPrecision(self) → float¶ Returns: output (float) –
-
getShadowStrength(self) → float¶ Returns: output (float) –
-
getShininess(self) → float¶ Returns: output (float) –
-
getShowOrientationIndicators(self) → bool¶ Gets the visibility of the orientation indicators.
Returns: output (bool) – true if the orientation indicators are visible, false otherwise
-
getShowViewFPS(self) → bool¶ Returns: output (bool) –
-
getSlabThickness(self) → float¶ Gets the view’s slab thickness.
Note
Note that this value represents the half slab thickness, in microns.
Returns: output (float) – the slab thickness, in microns (a double)
-
getSliceCountOfBox(self, aBox: ORSModel.ors.Box) → int¶ Gets the number of slices of a given box.
Parameters: aBox (ORSModel.ors.Box) – the visual box (a Box) Returns: output (int) – the number of slices in the box, in the current camera direction (a uint32_t)
-
getSliceIndexOfBox(self, aBox: ORSModel.ors.Box) → float¶ Gets the current slice position of a given box.
Parameters: aBox (ORSModel.ors.Box) – the visual box (an Box) Returns: output (float) – the current slice position in the box
-
getSpecularFactor(self) → float¶ Returns: output (float) –
-
getSpecularLightColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getSpotlightFactor(self) → float¶ Returns: output (float) –
-
getSurfaceDimensionUnit(self) → DimensionUnit¶ Gets the view’s surface dimension unit.
Returns: output (ORSModel.ors.DimensionUnit) –
-
getUseSuperSampling(self) → bool¶ Returns: output (bool) –
-
getValueInCurrentUnitConvertedToMeter(self, pValue: float) → float¶ Converts a value expressed in the view’s current dimension unit to meters.
Note
This method is the reverse of getValueInMeterConvertedToCurrentUnit().
Note
The value to be converted is assumed to be expressed in the view’s current dimension unit. For example, if the view’s current unit is cm, getValueInCurrentUnitConvertedToMeter(1.0) will return 0.01 (1 meter -> 100 cm).
Parameters: pValue (float) – the value to be converted (a double) Returns: output (float) – the value converted to meters (a double)
-
getValueInMeterConvertedToCurrentUnit(self, pValue: float) → float¶ Converts a value against the view’s current dimension unit.
Note
The value to be converted is always assumed to be expressed in meters, the reference internal unit. For example, if the view’s current unit is cm, getValueInMeterConvertedToCurrentUnit(1.0) will return 100 (1 meter -> 100 cm).
Note
This method is the reverse of getValueInCurrentUnitConvertedToMeter().
Parameters: pValue (float) – the value (in meters) to be converted (a double) Returns: output (float) – the value converted (a double)
-
getViewAlignedBoxThatContainsAllEnabledVisualsReachableByRenderer(self) → Box¶ Returns: output (ORSModel.ors.Box) –
-
getViewBoundedPlaneInWorldCoordinates(self) → Rectangle¶ Returns a plane bounded to the view, in world coordinates.
Returns: output (ORSModel.ors.Rectangle) – a plane (an Rectangle)
-
getViewCenter(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getViewMatrix(self) → Matrix4x4¶ Returns: output (ORSModel.ors.Matrix4x4) –
-
getViewMode(self) → int¶ Gets the view’s volume mode.
Note
See the ORS_def.h file for valid values.
Returns: output (int) – a CxvView_Mode (a int32_t)
-
getViewNormal(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getViewOrientedBoxThatContainsBox(self, aBox: ORSModel.ors.Box) → Box¶ Parameters: aBox (ORSModel.ors.Box) – Returns: output (ORSModel.ors.Box) –
-
getViewOrientedPlane(self) → OrientedPlane¶ Returns: output (ORSModel.ors.OrientedPlane) –
-
getViewPlane(self) → Plane¶ Returns: output (ORSModel.ors.Plane) –
-
getViewRepresentationColor(self) → Color¶ Gets the view’s representation color.
Note
This call is used to query the color that represents the view.
Returns: output (ORSModel.ors.Color) – a color (a Color)
-
getVolumeDimensionUnit(self) → DimensionUnit¶ Returns: output (ORSModel.ors.DimensionUnit) –
-
getWorldLengthTransformedToScreenLength(self, inLength: float) → float¶ Parameters: inLength (float) – Returns: output (float) –
-
getWorldPositionArrayTransformedToXY(self, pWorldPositions: ORSModel.ors.SequenceableCollection, nPtsCount: int, pOutputXYPositions: ORSModel.ors.SequenceableCollection) → SequenceableCollection¶ Parameters: - pWorldPositions (ORSModel.ors.SequenceableCollection) –
- nPtsCount (int) –
- pOutputXYPositions (ORSModel.ors.SequenceableCollection) –
Returns: output (ORSModel.ors.SequenceableCollection) –
-
getWorldPositionFromLocalPosition(self, pVisual: ORSModel.ors.Visual, pLocalPosition: ORSModel.ors.Vector3, pTimeStep: int) → Vector3¶ Parameters: - pVisual (ORSModel.ors.Visual) –
- pLocalPosition (ORSModel.ors.Vector3) –
- pTimeStep (int) –
Returns: output (ORSModel.ors.Vector3) –
-
getWorldPositionTransformedToXY(self, pPosition: ORSModel.ors.Vector3, oX: float, oY: float) → bool¶ Transforms a world coordinate in 2D coordinates.
Note
The values are returned in the last two parameters supplied.
Parameters: pPosition (ORSModel.ors.Vector3) – a position (an Vector3)
Returns: - output (bool) – true if the world Z coordinate is currently visible, false otherwise
- oX (float) – the X 2D coordinate (a double*)
- oY (float) – the Y 2D coordinate (a double*)
-
getXSize(self) → int¶ Gets the view X size.
Returns: output (int) – the X size, in pixels (a uint16_t)
-
getXYArrayTransformedToLocalPosition(self, pVisual: ORSModel.ors.Visual, pXYPositions: ORSModel.ors.SequenceableCollection, nPtsCount: int, pTimeStep: int, pOutputLocalPositions: ORSModel.ors.SequenceableCollection) → SequenceableCollection¶ Parameters: - pVisual (ORSModel.ors.Visual) –
- pXYPositions (ORSModel.ors.SequenceableCollection) –
- nPtsCount (int) –
- pTimeStep (int) –
- pOutputLocalPositions (ORSModel.ors.SequenceableCollection) –
Returns: output (ORSModel.ors.SequenceableCollection) –
-
getXYArrayTransformedToWorldPosition(self, pXYPositions: ORSModel.ors.SequenceableCollection, nPtsCount: int, pOutputWorldPositions: ORSModel.ors.SequenceableCollection) → SequenceableCollection¶ Parameters: - pXYPositions (ORSModel.ors.SequenceableCollection) –
- nPtsCount (int) –
- pOutputWorldPositions (ORSModel.ors.SequenceableCollection) –
Returns: output (ORSModel.ors.SequenceableCollection) –
-
getXYTransformedToWorldPosition(self, x: float, y: float) → Vector3¶ Transforms a 2D coordinates to world coordinate.
Note
The world coordinate is projected on the current view bounded plane.
Parameters: - x (float) – the X 2D coordinate (a double)
- y (float) – the Y 2D coordinate (a double)
Returns: output (ORSModel.ors.Vector3) – a position in world coordinate(an Vector3)
-
getYSize(self) → int¶ Gets the view Y size.
Returns: output (int) – the Y size, in pixels (a uint16_t)
-
getZoomFactor(self) → float¶ Gets the current zoom factor.
Returns: output (float) – zoom factor (a double)
-
imshow(node, lut=None)¶ With a view, show the node (such as a Channel, ROI, Mesh) in this view with an optional Lookup Table
Parameters: - node (ORSModel.ors.Node) –
- lut (ORSModel.ors.LookupTable) –
-
incrementTimeStep(self) → None¶ Increments the view’s time step counter.
Note
When looking at 4D data (3D plus a time dimension), one can cycle through the time dimension in this fashion.
-
none()¶ View.__init__() -> View
-
refresh(self) → None¶ Refreshes the view.
Note
The view is not immediately refreshed, it will be so when the next timer fires up.
-
refreshAndWait()¶ Force a refresh of the view and wait for the refresh to be finnished before return
-
resetNeedRefresh(self) → None¶
-
saveScreenshot(filename, scale=1.0)¶ Save a screenshot
Parameters: - filename (file saving) – path to save
- scale (float) – scaling factor
-
set2DBackgroundColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the view’s 2D background color.
Note
The color should be expressed as RGB (the alpha is not used here).
Parameters: IColor (ORSModel.ors.Color) – a color (an Color)
-
set3DBackgroundColor(self, iMode: int, IColor1: ORSModel.ors.Color, IColor2: ORSModel.ors.Color) → None¶ Sets the view’s 3D background color.
Note
The colors should be expressed as RGB (the alpha is not used here).
Parameters: - iMode (int) – a mode (a short)
- IColor1 (ORSModel.ors.Color) – a color (an Color)
- IColor2 (ORSModel.ors.Color) – a color (an Color)
-
setAmbientLightColor(self, IColor: ORSModel.ors.Color) → None¶ Parameters: IColor (ORSModel.ors.Color) –
-
setAutoFocus(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setBorderColor(self, IColor: ORSModel.ors.Color) → None¶ Parameters: IColor (ORSModel.ors.Color) –
-
setBorderWidth(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setCamera(self, aCamera: ORSModel.ors.Camera) → None¶ Parameters: aCamera (ORSModel.ors.Camera) –
-
setCameraLogged(camera, logging=True)¶
-
setCameraSpaceLightPos(self, pPosition: ORSModel.ors.Vector3) → None¶ Parameters: pPosition (ORSModel.ors.Vector3) –
-
setCaptionTextFontName(self, sFontName: str) → None¶ Parameters: sFontName (str) –
-
setCineMode(self, mode: int) → None¶ Parameters: mode (int) –
-
setCurrentTimeStep(self, value: int) → None¶ Parameters: value (int) –
-
setDiffuseFactor(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setDiffuseLightColor(self, IColor: ORSModel.ors.Color) → None¶ Parameters: IColor (ORSModel.ors.Color) –
-
setDimensionUnitID(self, dimensionType: int, pUnit: int) → None¶ Sets the view’s dimension unit.
Note
See the ORS_def.h file for enum CxvUniverse_Dimension and CxvUniverse_Dimension_type values.
Parameters: - dimensionType (int) – the unit type (a CxvUniverse_Dimension_type)
- pUnit (int) – a CxvUniverse_Dimension unit (a int32_t*)
-
setDrawFocusRect(self, value: bool) → None¶ Parameters: value (bool) –
-
setEnableFocus(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setFitToViewBorder(self, value: int) → None¶ Sets the number of pixels allocated to the border around the view.
Parameters: value (int) – the number of pixels (a int32_t*)
-
setFocalDistance(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setFocusSigma(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setImageNumberingAscending(self, value: bool) → None¶ Parameters: value (bool) –
-
setIsBorderEnabled(self, aValue: bool) → None¶ Enables or disables the view border.
Parameters: aValue (bool) – true to enable the border, false to disable it.
-
setIsEnabled(self, pEnabled: bool) → None¶ Enables or disables the view.
Note
Disabled views are “inert”, they react to very few events and display nothing.
Parameters: pEnabled (bool) – true to enable the view, false to disable it
-
setIsOrientationAndPositionLocked(self, value: bool) → None¶ Sets the view’s position lock status.
Note
When a view position is locked, one cannot set its oblique info.
Parameters: value (bool) – true to lock the view position, false otherwise
-
setIsOrientationLocked(self, value: bool) → None¶ Sets the view’s orientation lock status.
Note
When a view orientation is locked, one cannot set its oblique info.
Parameters: value (bool) – true to lock the view orientation, false otherwise
-
setIsOrthoProjection(self, value: bool) → None¶ Parameters: value (bool) –
-
setIsPositionLocked(self, value: bool) → None¶ Sets the view’s position lock status.
Note
When a view position is locked, one cannot set its oblique info.
Parameters: value (bool) – true to lock the view position, false otherwise
-
setIsShadowEnabled(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setIsTrackingLight(self, value: bool) → None¶ Sets the view to be in tracking light mode or not.
Parameters: value (bool) – true to be in tracking light mode, false otherwise
-
setLODEnabled(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setLODMode(self, dwMode: int) → None¶ Sets the view LOD mode.
Note
LOD stands for Level Of Detail. It defines how much detail is displayed when moving the visual artifacts in the view. The lower the level, the faster the visual will move.
Note
See the ORS_def.h file, it contains defines (in the form CXV_DISPLAY_LOD_XXX) for valid values.
Parameters: dwMode (int) – an LOD mode (a int32_t*)
-
setLightFollowCamera(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setLightMaxDistance(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setLightPosition(self, aLightPosition: ORSModel.ors.Vector3) → None¶ Parameters: aLightPosition (ORSModel.ors.Vector3) –
-
setOrientationIndicators(self, left: str, right: str, up: str, down: str, top: str, bottom: str) → None¶ Sets the orientation indicators.
Parameters: - left (str) – 6 string, one for each orientation indicator
- right (str) –
- up (str) –
- down (str) –
- top (str) –
- bottom (str) –
-
setOrientedPlaneWithBox(self, anOrientedPlane: ORSModel.ors.OrientedPlane, aBox: ORSModel.ors.Box) → None¶ Parameters: - anOrientedPlane (ORSModel.ors.OrientedPlane) –
- aBox (ORSModel.ors.Box) –
-
setOrientedPlaneWithBoxLogged(orientedPlane, box, logging=True)¶
-
setOrthoZoomFactor(self, value: float) → None¶ Parameters: value (float) –
-
setOrthoZoomFactorLogged(zoomFactor, logging=True)¶
-
setProjectionMode2D(self, iMode: int) → None¶ Sets the 2D projection mode of the view.
Note
See CxvVolumeProjection_Mode in ORS_def.h for supported volume projection modes.
Parameters: iMode (int) – a 2D projection mode (an int)
-
setProjectionMode2DLogged(projectionMode, logging=True)¶
-
setRenderMode(self, mode: int) → None¶ Sets the view render mode.
Parameters: mode (int) – an OrsRenderMode (a uint16_t, see ors_def.h)
-
setRestTime(self, value: int) → None¶ Parameters: value (int) –
-
setShadowMapSize(self, value: int) → None¶ Parameters: value (int) –
-
setShadowOpacity(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setShadowPrecision(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setShadowStrength(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setShininess(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setShowOrientationIndicators(self, pFlag: bool) → None¶ Sets the visibility of the orientation indicators.
Parameters: pFlag (bool) – true to show the orientation indicators, false to hide them
-
setShowViewFPS(self, bShow: bool) → None¶ Parameters: bShow (bool) –
-
setSize(self, xSize: int, ySize: int) → None¶ Sets the view size.
Parameters: - xSize (int) – the X size, in pixels (a uint16_t)
- ySize (int) – the Y size, in pixels (a uint16_t)
-
setSlabThickness(self, value: float) → None¶ Sets the view’s slab thickness.
Note
Note that this value should represent the half slab thickness, in microns.
Parameters: value (float) – the slab thickness, in microns (a double)
-
setSlabThicknessLogged(thickness, logging=True)¶
-
setSliceIndexOfBox(self, aBox: ORSModel.ors.Box, sliceIndex: float) → None¶ Sets the current slice position for a given box.
Parameters: - aBox (ORSModel.ors.Box) – the visual box (an Box)
- sliceIndex (float) – the slice position in the box to set
-
setSliceIndexOfBoxLogged(box, sliceIndex, logging=True)¶
-
setSpecularFactor(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setSpecularLightColor(self, IColor: ORSModel.ors.Color) → None¶ Parameters: IColor (ORSModel.ors.Color) –
-
setSpotlightFactor(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setUseOrthographicProjectionIn3D(ortho)¶ Use or not orthographic projection in 3D
Parameters: ortho (bool) – use orthographic projection
-
setUseSuperSampling(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setViewMode(self, viewMode: int) → None¶ Sets the view’s volume mode.
Note
See the ORS_def.h file for valid values.
Parameters: viewMode (int) – a CxvView_Mode (a int32_t*)
-
setViewModeLogged(viewMode, logging=True)¶
-
setViewOrientedPlane(self, anOrientedPlane: ORSModel.ors.OrientedPlane, aSlabThickness: float) → None¶ Parameters: - anOrientedPlane (ORSModel.ors.OrientedPlane) –
- aSlabThickness (float) –
-
setViewOrientedPlaneLogged(orientedPlane, thickness, logging=True)¶
-
setViewPlanePosition(self, worldPosition: ORSModel.ors.Vector3, centerView: bool) → None¶ Parameters: - worldPosition (ORSModel.ors.Vector3) –
- centerView (bool) –
-
setViewPlanePositionLogged(point, center, logging=True)¶
-
setViewRepresentationColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the view’s representation color.
Note
This call is used to specify the color that represents the view
Parameters: IColor (ORSModel.ors.Color) – a color (an Color)
-
setXSize(self, xSize: int) → None¶ Sets the view X size.
Parameters: xSize (int) – the X size, in pixels (a uint16_t)
-
setYSize(self, ySize: int) → None¶ Sets the view Y size.
Parameters: ySize (int) – the Y size, in pixels (a uint16_t)
-
setZoomFactor(self, value: float) → None¶ Parameters: value (float) –
-
Visual¶
-
class
ORSModel.ors.Visual¶ Bases:
ORSModel.ors.Nodebrief_description: An abstract class that handles all services pertaining to visualizing objects. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005
-
getAction(self) → str¶ Returns: output (str) –
-
getAllParentViewsWhereVisualIsVisible(self) → List¶ Gets a list of views where the visual appears.
Returns: output (ORSModel.ors.List) – a list of views (an List)
-
getAssociatedState(self) → str¶ Returns: output (str) –
-
getBoundingBox(self, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → Box¶ Parameters: - iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Box) –
-
getBoundingBoxInView(self, aView: ORSModel.ors.View) → Box¶ Gets the bounding box of the visual in the orientation of the view.
Parameters: aView (ORSModel.ors.View) – the view (a View) Returns: output (ORSModel.ors.Box) – the bounding box (a Box) or NULL if no view is provided
-
getBoundingRectangleInView(self, aView: ORSModel.ors.View) → Rectangle¶ Gets the bounding rectangle of the visual in the orientation of the view.
Parameters: aView (ORSModel.ors.View) – the view (a View) Returns: output (ORSModel.ors.Rectangle) – the bounding Rectangle (a Rectangle) or NULL if no view is provided
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getClipBox(timestep=0, display=None)¶ Gets the clip box of the visual
Parameters: - timestep (int) – the time index
- display (ORSModel.ors.View) – a view
Returns: aClipBox (ORSModel.ors.Box) – the clip box
-
getFirstFrameTowardsNode(self, anINode: ORSModel.ors.Node) → ReferenceFrame¶ Gets the first frame found going up the hierarchy towards a given object.
Parameters: anINode (ORSModel.ors.Node) – the target node (an Node) Returns: output (ORSModel.ors.ReferenceFrame) – a frame (an ReferenceFrame) or NULL if no frame is found
-
getFrameTransformationFromNode(self, towardNode: ORSModel.ors.Node, pTimeStep: int) → Matrix4x4¶ Parameters: - towardNode (ORSModel.ors.Node) –
- pTimeStep (int) –
Returns: output (ORSModel.ors.Matrix4x4) –
-
getHighlightColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getIsHighlightable(self) → bool¶ Returns: output (bool) –
-
getIsHighlightedInView(self, aView: ORSModel.ors.View) → bool¶ Parameters: aView (ORSModel.ors.View) – Returns: output (bool) –
-
getIsPickable(self) → bool¶ Gets the visual’s pickable state.
Returns: output (bool) – true if the visual is pickable, false otherwise
-
getIsSelected(self) → bool¶ Returns: output (bool) –
-
getIsShadowEnabled(self) → bool¶ Returns: output (bool) –
-
getIsVisibleForAllViews(self) → bool¶ Gets the visibility of the receiver in all views.
Returns: output (bool) – true if the receiver is visible is all views, false otherwise
-
getIsVisibleForView(self, IView: ORSModel.ors.View) → bool¶ Gets the visibility of the receiver in a given view.
Parameters: IView (ORSModel.ors.View) – the view (a View) Returns: output (bool) – true if the receiver is visible, false otherwise
-
getMaterial(self) → Material¶ Gets the visual’s material.
Returns: output (ORSModel.ors.Material) – a material (an Material) or NULL is none exists
-
getPickTolerance(self) → float¶ Gets the pick tolerance.
Note
The pick tolerance is the radius, around any visual portion, where the mouse cursor can grab the visual. It’s expressed in pixels.
Returns: output (float) – a number of pixels (a double between 0 and 1)
-
getShowIn2D(self) → bool¶ Gets the visual visibility mode in 2D views.
Returns: output (bool) – true if the visual is visible in 2D views, false otherwise
-
getShowIn3D(self) → bool¶ Gets the visual visibility mode in 2D views.
Returns: output (bool) – true if the visual is visible in 2D views, false otherwise
-
getTSize(self) → int¶ Gets the T size.
Returns: output (int) – T size (a uint32_t)
-
getZEnabled(self) → bool¶ Gets the visual’s Z buffer state.
Note
Default value is true.
Note
Z buffering means that the renderer records pixel depth to hide geometry that is behind other geometry. When Z buffer is disabled, the visual is displayed above all geometry ALREADY RENDERED (this statement is important), even if it should not.
Returns: output (bool) – true if Z buffer is enabled, false otherwise
-
initializeVisual(self) → bool¶ Initializes the visual.
Returns: output (bool) –
-
none()¶ Visual.__init__() -> Visual
-
resetVisibility(self) → None¶
-
setAction(self, anAction: str) → None¶ Parameters: anAction (str) –
-
setAssociatedState(self, aGlobalState: str) → None¶ Parameters: aGlobalState (str) –
-
setHighlightColor(self, color: ORSModel.ors.Color) → None¶ Parameters: color (ORSModel.ors.Color) –
-
setIsHighlightable(self, value: bool) → None¶ Parameters: value (bool) –
-
setIsHighlightedInView(self, aView: ORSModel.ors.View, aFlag: bool) → None¶ Parameters: - aView (ORSModel.ors.View) –
- aFlag (bool) –
-
setIsPickable(self, value: bool) → None¶ Sets the visual to be pickable or not.
Parameters: value (bool) – TRUE to make the visual pickable, false otherwise
-
setIsSelected(self, aBool: bool) → None¶ Parameters: aBool (bool) –
-
setIsShadowEnabled(self, value: bool) → None¶ Parameters: value (bool) –
-
setIsVisibleForAllViews(self, bValue: bool) → None¶ Sets the visibility of the receiver in all views.
Note
This API overrides all prior calls to setIsVisibleForViews(), or in other words, any view specific setting is erased.
Parameters: bValue (bool) – true to make the receiver visible in all views, false to hide it
-
setIsVisibleForView(self, IView: ORSModel.ors.View, bValue: bool) → None¶ Sets the visibility of the receiver in a given view.
Note
This API overrides a prior call to setIsVisibleForAllViews(), for a given view.
Parameters: - IView (ORSModel.ors.View) – the view (n View)
- bValue (bool) – true to make the receiver visible, false to hide it
-
setMaterial(self, aIMaterial: ORSModel.ors.Material) → None¶ Sets the visual’s material.
Parameters: aIMaterial (ORSModel.ors.Material) – a material (an Material)
-
setPickTolerance(self, pValue: float) → None¶ Sets the pick tolerance.
Note
The pick tolerance is the radius, around any visual portion, where the mouse cursor can grab the visual. It’s expressed in pixels.
Parameters: pValue (float) – a number of pixels (a double between 0 and 1)
-
setShowIn2D(self, show: bool) → None¶ Sets the visual to be visible or not in 2D views.
Parameters: show (bool) – true to have the visual be visible in 2D views, false otherwise
-
setShowIn3D(self, show: bool) → None¶ Sets the visual to be visible or not in 3D views.
Parameters: show (bool) – true to have the visual be visible in 3D views, false otherwise
-
setTSize(self, pTSize: int) → None¶ Sets the T size.
Parameters: pTSize (int) – T size (a uint32_t)
-
setZEnabled(self, value: bool) → None¶ Sets the visual’s Z buffer state.
Note
Default value is true.
Note
Z buffering means that the renderer records pixel depth to hide geometry that is behind other geometry. When Z buffer is disabled, the visual is displayed above all geometry ALREADY RENDERED (this statement is important), even if it should not.
Parameters: value (bool) – true to enable the Z buffer, false to disable it
-
stackVisualState(self) → None¶ Saves the receiver’s visual state on a stack.
-
unstackVisualState(self) → None¶ Restores a visual state from a stack.
-
VisualAngle¶
-
class
ORSModel.ors.VisualAngle¶ Bases:
ORSModel.ors.Annotationbrief_description: Represents an angle and its measurement. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Aug 2006
-
fitFromPoints(self, count: int, points: float, iTIndex: int) → None¶ Gets the primitive to fit itself to a list of points.
Note
Points should be supplied in triplets, for respectively the X, Y and Z position.
Parameters: - count (int) – the number of triplets supplied (an uint32_t) (see note below)
- points (float) – an array of points to fit to (a double*)
- iTIndex (int) –
-
getAngleValue(self, iTIndex: int) → float¶ Gets the value of the angle.
Note
The angle value is always in radian.
Parameters: iTIndex (int) – Returns: output (float) – the angle value (a float)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getIsSplitted(self, iTIndex: int) → bool¶ Queries the angle to see if it is splitted or not.
Note
A splitted angle is not joined at the center, it is the angle between two vectors.
Parameters: iTIndex (int) – Returns: output (bool) – TRUE if the angle is splitted, FALSE otherwise (see note)
-
none()¶ VisualAngle.__init__() -> VisualAngle
-
setIsSplitted(self, value: bool, iTIndex: int) → None¶ Sets the angle to be splitted or not.
Note
A splitted angle is not joined at the center, it is the angle between two vectors.
Parameters: - value (bool) – TRUE to split the angle, FALSE otherwise (see note)
- iTIndex (int) –
-
VisualArrow¶
-
class
ORSModel.ors.VisualArrow¶ Bases:
ORSModel.ors.Annotation-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getFixedDirection(self) → float¶ Return the arrow’s fixed direction (in 3D only).
Returns: output (float) –
-
getFixedLength(self) → float¶ Return the arrow’s fixed length (in 3D only).
Returns: output (float) – the arrow length (a double), a normalized value between 0 and 1, representing the proportion of the arrow.
-
getIsFixedDirection(self) → bool¶ Queries the arrow to know if it has a fixed direction or not (in 3D only).
Returns: output (bool) – true if arrow has a fixed direction, false otherwise
-
getIsFixedLength(self) → bool¶ Queries the arrow to know if it has a fixed length or not (in 3D only).
Returns: output (bool) – true if arrow has a fixed length, false otherwise
-
getPositionOnVisual(self, iTIndex: int) → Vector3¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.Vector3) –
-
none()¶ VisualArrow.__init__() -> VisualArrow
-
setFixedDirection(self, dir: float) → None¶ Sets the arrow’s fixed direction (in 3D only).
Parameters: dir (float) – the arrow direction (a double), a value between 0 and 359, representing the rotation of the arrow.
-
setFixedLength(self, fLength: float) → None¶ Sets the arrow’s fixed length (in 3D only).
Parameters: fLength (float) – the arrow length (a double), a normalized value between 0 and 1, representing the proportion of the arrow.
-
setIsFixedDirection(self, bfixed: bool) → None¶ Sets the arrow to have a fixed direction or not (in 3D only).
Parameters: bfixed (bool) – true to have a fixed direction, false otherwise
-
setIsFixedLength(self, bfixed: bool) → None¶ Sets the arrow to have a fixed length or not (in 3D only).
Parameters: bfixed (bool) – true to have a fixed length, false otherwise
-
setIsPickingVisual(self, value: bool, iTIndex: int) → None¶ Parameters: - value (bool) –
- iTIndex (int) –
-
setPositionOnVisual(self, x: float, y: float, z: float, iTIndex: int) → None¶ Parameters: - x (float) –
- y (float) –
- z (float) –
- iTIndex (int) –
-
setPositionOnVisualForAllTimeStep(self, x: float, y: float, z: float) → None¶ Parameters: - x (float) –
- y (float) –
- z (float) –
-
VisualBox¶
-
class
ORSModel.ors.VisualBox¶ Bases:
ORSModel.ors.VisualShape3D-
getBox(self, iTIndex: int) → Box¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.Box) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getGridRectangleSize(self) → float¶ Returns: output (float) –
-
getHighlightedBoxFace(self, faceIndex: int, iTIndex: int) → bool¶ Parameters: - faceIndex (int) –
- iTIndex (int) –
Returns: output (bool) –
-
getHighlightedBoxFaceCount(self, iTIndex: int) → int¶ Parameters: iTIndex (int) – Returns: output (int) –
-
getIsMiddleAnchorHighlited(self, iTIndex: int) → bool¶ Parameters: iTIndex (int) – Returns: output (bool) –
-
getPickedFace(self, iTIndex: int) → int¶ Parameters: iTIndex (int) – Returns: output (int) –
-
getRangeMode(self, iTIndex: int) → bool¶ Parameters: iTIndex (int) – Returns: output (bool) –
-
getSelectedBoxFace(self, faceIndex: int, iTIndex: int) → bool¶ Parameters: - faceIndex (int) –
- iTIndex (int) –
Returns: output (bool) –
-
getSelectedBoxFaceCount(self, iTIndex: int) → int¶ Parameters: iTIndex (int) – Returns: output (int) –
-
getShowFaceAnchors(self) → bool¶ Returns: output (bool) –
-
getShowGrid(self) → bool¶ Returns: output (bool) –
-
none()¶ VisualBox.__init__() -> VisualBox
-
pickBoxFace(self, pDisplay: ORSModel.ors.View, xPixelPositionInDisplay: int, yPixelPositionInDisplay: int) → int¶ Parameters: - pDisplay (ORSModel.ors.View) –
- xPixelPositionInDisplay (int) –
- yPixelPositionInDisplay (int) –
Returns: output (int) –
-
pickBoxMiddleAnchor(self, pDisplay: ORSModel.ors.View, xPixelPositionInDisplay: int, yPixelPositionInDisplay: int) → bool¶ Parameters: - pDisplay (ORSModel.ors.View) –
- xPixelPositionInDisplay (int) –
- yPixelPositionInDisplay (int) –
Returns: output (bool) –
-
pickSpecificBoxFace(self, pDisplay: ORSModel.ors.View, faceIndex: int, xPixelPositionInDisplay: int, yPixelPositionInDisplay: int) → bool¶ Parameters: - pDisplay (ORSModel.ors.View) –
- faceIndex (int) –
- xPixelPositionInDisplay (int) –
- yPixelPositionInDisplay (int) –
Returns: output (bool) –
-
setBox(self, aBox: ORSModel.ors.Box, iTIndex: int) → None¶ Parameters: - aBox (ORSModel.ors.Box) –
- iTIndex (int) –
-
setGridRectangleSize(self, aSize: float) → None¶ Parameters: aSize (float) –
-
setHighlightedBoxFace(self, faceIndex: int, iTIndex: int) → None¶ Parameters: - faceIndex (int) –
- iTIndex (int) –
-
setIsMiddleAnchorHighlited(self, aValue: bool, iTIndex: int) → None¶ Parameters: - aValue (bool) –
- iTIndex (int) –
-
setPickedFace(self, faceIndex: int, iTIndex: int) → None¶ Parameters: - faceIndex (int) –
- iTIndex (int) –
-
setRangeMode(self, aFlag: bool, iTIndex: int) → None¶ Parameters: - aFlag (bool) –
- iTIndex (int) –
-
setSelectedBoxFace(self, faceIndex: int, iTIndex: int) → None¶ Parameters: - faceIndex (int) –
- iTIndex (int) –
-
setShowFaceAnchors(self, showFaceAnchors: bool) → None¶ Parameters: showFaceAnchors (bool) –
-
setShowGrid(self, flag: bool) → None¶ Parameters: flag (bool) –
-
unHighlightAllBoxFace(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
unSelectAllBoxFace(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
VisualCapsule¶
-
class
ORSModel.ors.VisualCapsule¶ Bases:
ORSModel.ors.VisualShape3D-
getCapsule(self, iTIndex: int) → Capsule¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.Capsule) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ VisualCapsule.__init__() -> VisualCapsule
-
setCapsule(self, aCapsule: ORSModel.ors.Capsule, iTIndex: int) → None¶ Parameters: - aCapsule (ORSModel.ors.Capsule) –
- iTIndex (int) –
-
VisualChannel¶
-
class
ORSModel.ors.VisualChannel¶ Bases:
ORSModel.ors.DatasetPresenterbrief_description: Represents a high quality visual volume in the view. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: Channel, VisualChannel, CxvChannel_Data_Type A visual object that represents a high quality volume. A high quality volume uses a volumetric texture instead of three stacks of 2D textures. Volume objects accept only channels of same size, spacing and type. The first channel connected to a volume will determine the size, spacing, and type of the volume. The volume supports up to 4 channels (rgba) ordered from the first parent (red) to the last (alpha). Missing channels are considered empty. Before it can be displayed, a volume must build its texture from the channels. This texture must be rebuilt every time the channels become dirty.
-
attachChannels(self, aChannel1: ORSModel.ors.Channel, aChannel2: ORSModel.ors.Channel, aChannel3: ORSModel.ors.Channel, aChannel4: ORSModel.ors.Channel) → bool¶ Attaches between 1 and 4 channels to the volume.
Note
A standard attachChild() with the channel is also performed by this method.
Note
The number of channels attached dictates the type of volume created: 1 channel results in a gray-scaled volume, 3 channels results in an RGB volume and 4 channels in an RGBA volume.
Parameters: - aChannel1 (ORSModel.ors.Channel) – a channel (a Channel)
- aChannel2 (ORSModel.ors.Channel) – a channel (a Channel)
- aChannel3 (ORSModel.ors.Channel) – a channel (a Channel)
- aChannel4 (ORSModel.ors.Channel) – a channel (a Channel)
Returns: output (bool) – true if attach operation succeeded, false otherwise
-
copyShapeFromChannel(self, pISourceChannel: ORSModel.ors.Channel) → None¶ Parameters: pISourceChannel (ORSModel.ors.Channel) –
-
detachChannel(self, anIChannel: ORSModel.ors.Channel) → bool¶ Detaches a child channel from the volume.
Note
A standard detachChild() from the channel is also performed by this method.
Parameters: anIChannel (ORSModel.ors.Channel) – a channel (a Channel) Returns: output (bool) – true if detach was successful, false otherwise
-
eraseWindowLevelDataForView(self, aView: ORSModel.ors.View) → None¶ Erases the window level data specific to a given view.
Parameters: aView (ORSModel.ors.View) –
-
get2DLODEnabled(self) → bool¶ Returns: output (bool) –
-
get2DLODSlabEnabled(self) → bool¶ Returns: output (bool) –
-
get2DOpacityFactorForAllViews(self) → float¶ Gets the opacity of the volume for all views.
Note
An opacity of 0 makes the volume fully transparent, while 1 makes it fully opaque.
Returns: output (float) – the opacity value (a double, between 0 and 1)
-
get2DOpacityFactorForView(self, aView: ORSModel.ors.View) → float¶ Gets the opacity of the volume for a given view.
Note
An opacity of 0 makes the volume fully transparent, while 1 makes it fully opaque.
Parameters: aView (ORSModel.ors.View) – the view (a View) Returns: output (float) – the opacity value (a double, between 0 and 1)
-
get2DWindowLevel2ValuesNormalized(self, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the current second 2D window level values (width and center) normalized between 0 and 1.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
Note
Return values are written to the supplied arguments.
Parameters: - pWindowWidth (float) –
- pWindowCenter (float) –
-
get2DWindowLevelValuesNormalizedForAllViews(self, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the current 3D window level values (width and center) normalized between 0 and 1, for all views.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
Note
Return values are written to the supplied arguments.
Parameters: - pWindowWidth (float) –
- pWindowCenter (float) –
-
get2DWindowLevelValuesNormalizedForView(self, aView: ORSModel.ors.View, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the current 2D window level values (width and center) normalized between 0 and 1, for a given view.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
Note
Return values are written to the supplied arguments.
Parameters: - aView (ORSModel.ors.View) – the view (a View)
- pWindowWidth (float) –
- pWindowCenter (float) –
-
get3DClassificationMode(self) → int¶ Returns: output (int) –
-
get3DOpacityFactorForAllViews(self) → float¶ Gets the opacity of the volume for all views.
Note
An opacity of 0 makes the volume fully transparent, while 1 makes it fully opaque.
Returns: output (float) – the opacity value (a double, between 0 and 1)
-
get3DOpacityFactorForView(self, aView: ORSModel.ors.View) → float¶ Gets the opacity of the volume for a given view.
Note
An opacity of 0 makes the volume fully transparent, while 1 makes it fully opaque.
Parameters: aView (ORSModel.ors.View) – the view (a View) Returns: output (float) – the opacity value (a double, between 0 and 1)
-
get3DShadingModeForView(self, aView: ORSModel.ors.View) → int¶ Parameters: aView (ORSModel.ors.View) – Returns: output (int) –
-
get3DWindowLevelValuesNormalizedForAllViews(self, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the current 3D window level values (width and center) normalized between 0 and 1, for all views.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
Note
Return values are written to the supplied arguments.
Parameters: - pWindowWidth (float) –
- pWindowCenter (float) –
-
get3DWindowLevelValuesNormalizedForView(self, aView: ORSModel.ors.View, pWindowWidth: float, pWindowCenter: float) → None¶ Gets the current 2D window level values (width and center) normalized between 0 and 1, for a given view.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
Note
Return values are written to the supplied arguments.
Parameters: - aView (ORSModel.ors.View) – the view (a View)
- pWindowWidth (float) –
- pWindowCenter (float) –
-
getBox(self) → Box¶ Returns: output (ORSModel.ors.Box) –
-
getCanCreateVolume(self, anIChannel: ORSModel.ors.Channel, nNbChannels: int) → bool¶ Returns true if a volume can be created with the given values.
Note
Some channels must be connected and channels type must be supported to create a volume.
Note
The second argument implies that all channels will be shaped similarly to the channel argument.
Note
supported channel types:
Parameters: - anIChannel (ORSModel.ors.Channel) – a channel (a Channel)
- nNbChannels (int) – total number of channels (an unsigned char)
Returns: output (bool) – true if a volume can be created, false otherwise
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getEdgeContrastForAllViews(self) → bool¶ Returns: output (bool) –
-
getEdgeContrastForView(self, aView: ORSModel.ors.View) → bool¶ Parameters: aView (ORSModel.ors.View) – Returns: output (bool) –
-
getFilteringMode(self) → int¶ Gets the current filtering mode.
Note
See CxvFiltering_Mode in ORS_def.h for supported filtering modes.
Returns: output (int) – the current filtering mode (a int32_t)
-
getGradientModeForAllViews(self) → int¶ Returns: output (int) –
-
getGradientModeForView(self, aView: ORSModel.ors.View) → int¶ Parameters: aView (ORSModel.ors.View) – Returns: output (int) –
-
getHasSourceDataSameShapeAsChannel(self, pChannel: ORSModel.ors.Channel) → bool¶ Verifies if the visual’s source data has the same shape as another channel (see note below).
Note
Shape comparison includes axis sizes, spacing, type, position and orientation.
Parameters: pChannel (ORSModel.ors.Channel) – a comparison channel (a Channel) Returns: output (bool) – true if the comparison channel has same shape as receiver visual, false otherwise
-
getInverseSegmentationLighting(self) → bool¶ Returns: output (bool) –
-
getIs2DRangeSelectionEnabled(self) → bool¶ Returns: output (bool) –
-
getIsoValueForAllViews(self) → float¶ Gets the IsoValue of the volume for all views.
Returns: output (float) – the iso value (a double, between 0 and 1)
-
getIsoValueForView(self, aView: ORSModel.ors.View) → float¶ Gets the IsoValue of the volume for a given view.
Parameters: aView (ORSModel.ors.View) – the view (a View) Returns: output (float) – the iso value (a double, between 0 and 1)
-
getPixelIntensity(self, aView: ORSModel.ors.View, pXPos: int, pYPos: int, pIntensity: float) → bool¶ Gets the pixel intensity at any given screen coordinate, for a given view.
Parameters: - aView (ORSModel.ors.View) – a view (a View)
- pXPos (int) – the X coordinate (a uint32_t)
- pYPos (int) – the Y coordinate (a uint32_t)
- pIntensity (float) –
Returns: output (bool) –
-
getProjectionMode(self) → int¶ Gets the projection mode.
Note
See CxvVolumeProjection_Mode in ORS_def.h for supported volume projection modes.
Returns: output (int) – the projection mode (an int)
-
getSourceDataPosition(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getSourceDataXSize(self) → int¶ Gets the visual’s total X size.
Returns: output (int) – the X size (a uint32_t)
-
getSourceDataXSpacing(self) → float¶ Gets the visual’s X spacing.
Returns: output (float) – the X spacing (a double)
-
getSourceDataYSize(self) → int¶ Gets the visual’s total Y size.
Returns: output (int) – the Y size (a uint32_t)
-
getSourceDataYSpacing(self) → float¶ Gets the visual’s Y spacing.
Returns: output (float) – the Y spacing (a double)
-
getSourceDataZSize(self) → int¶ Gets the visual’s total Z size.
Returns: output (int) – the Z size (a uint32_t)
-
getSourceDataZSpacing(self) → float¶ Gets the visual’s Z spacing.
Returns: output (float) – the Z spacing (a double)
-
getSurfacenessThresholdForAllViews(self) → float¶ Returns: output (float) –
-
getSurfacenessThresholdForView(self, aView: ORSModel.ors.View) → float¶ Parameters: aView (ORSModel.ors.View) – Returns: output (float) –
-
getUseHighQualityIn3D(self) → bool¶ Returns: output (bool) –
-
getUseTriCubicFilteringIn2D(self) → bool¶ Returns: output (bool) –
-
getUseTriCubicFilteringIn3D(self) → bool¶ Returns: output (bool) –
-
getWLGammaFactorForView(self, pDisplay: ORSModel.ors.View) → float¶ Gets the window leveling gamma factor of a specific view.
Parameters: pDisplay (ORSModel.ors.View) – the view (a View) Returns: output (float) –
-
none()¶ VisualChannel.__init__() -> VisualChannel
-
reset2DWindowLevelForAllViews(self) → None¶ Resets the 3D window level for all views.
Note
If the volume’s channel has a suggested leveling value, it will be used, otherwise the leveling will be set to show the full range of data.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
-
reset2DWindowLevelForView(self, aView: ORSModel.ors.View) → None¶ Resets the 2D window level for a given view.
Note
If the volume’s channel has a suggested leveling value, it will be used, otherwise the leveling will be set to show the full range of data.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
Parameters: aView (ORSModel.ors.View) – the view (a View)
-
reset3DWindowLevelForAllViews(self) → None¶ Resets the 3D window level for all views.
Note
If the volume’s channel has a suggested leveling value, it will be used, otherwise the leveling will be set to show the full range of data.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
-
reset3DWindowLevelForView(self, aView: ORSModel.ors.View) → None¶ Resets the 2D window level for a given view.
Note
If the volume’s channel has a suggested leveling value, it will be used, otherwise the leveling will be set to show the full range of data.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
Parameters: aView (ORSModel.ors.View) – the view (a View)
-
set2DLODEnabled(self, value: bool) → None¶ Parameters: value (bool) –
-
set2DLODSlabEnabled(self, value: bool) → None¶ Parameters: value (bool) –
-
set2DOpacityFactorForAllViews(self, value: float) → None¶ Sets the opacity of the volume for all views.
Note
An opacity of 0 makes the volume fully transparent, while 1 makes it fully opaque.
Parameters: value (float) – the opacity value (a double, between 0 and 1)
-
set2DOpacityFactorForView(self, aView: ORSModel.ors.View, value: float) → None¶ Sets the opacity of the volume for a given view.
Note
An opacity of 0 makes the volume fully transparent, while 1 makes it fully opaque.
Parameters: - aView (ORSModel.ors.View) – the view (a View)
- value (float) – the opacity value (a double, between 0 and 1)
-
set2DWindowLevel2ToShowFullRange(self) → None¶ Sets the second 2D window level to show the full range of data.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
-
set2DWindowLevelToShowFullRangeForAllViews(self) → None¶ Sets the 3D window level to show the full range of data, for all views.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
-
set2DWindowLevelToShowFullRangeForView(self, aView: ORSModel.ors.View) → None¶ Sets the 3D window level to show the full range of data, for a given view.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
Parameters: aView (ORSModel.ors.View) – the view (a View)
-
set3DClassificationMode(self, aMode: int) → None¶ Parameters: aMode (int) –
-
set3DOpacityFactorForAllViews(self, value: float) → None¶ Sets the opacity of the volume for all views.
Note
An opacity of 0 makes the volume fully transparent, while 1 makes it fully opaque.
Parameters: value (float) – the opacity value (a double, between 0 and 1)
-
set3DOpacityFactorForView(self, aView: ORSModel.ors.View, value: float) → None¶ Sets the opacity of the volume for a given view.
Note
An opacity of 0 makes the volume fully transparent, while 1 makes it fully opaque.
Parameters: - aView (ORSModel.ors.View) – the view (a View)
- value (float) – the opacity value (a double, between 0 and 1)
-
set3DShadingModeForView(self, aView: ORSModel.ors.View, aMode: int) → None¶ Parameters: - aView (ORSModel.ors.View) –
- aMode (int) –
-
set3DWindowLevelToShowFullRangeForAllViews(self) → None¶ Sets the 3D window level to show the full range of data, for all views.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
-
set3DWindowLevelToShowFullRangeForView(self, aView: ORSModel.ors.View) → None¶ Sets the 3D window level to show the full range of data, for a given view.
Note
Volumes support two leveling modes, one for 3D views and the other for 2D views.
Parameters: aView (ORSModel.ors.View) – the view (a View)
-
setEdgeContrastForAllViews(self, value: bool) → None¶ Parameters: value (bool) –
-
setEdgeContrastForView(self, aView: ORSModel.ors.View, value: bool) → None¶ Parameters: - aView (ORSModel.ors.View) –
- value (bool) –
-
setFilteringMode(self, iMode: int) → None¶ Sets the current filtering mode.
Note
See CxvFiltering_Mode in ORS_def.h for supported filtering modes.
Parameters: iMode (int) – a filtering mode (a int32_t*)
-
setGradientModeForAllViews(self, aValue: int) → None¶ Parameters: aValue (int) –
-
setGradientModeForView(self, aView: ORSModel.ors.View, aValue: int) → None¶ Parameters: - aView (ORSModel.ors.View) –
- aValue (int) –
-
setInverseSegmentationLighting(self, bInverse: bool) → None¶ Parameters: bInverse (bool) –
-
setIs2DRangeSelectionEnabled(self, pFlag: bool) → None¶ Parameters: pFlag (bool) –
-
setIsoValueForAllViews(self, value: float) → None¶ Sets the IsoValue of the volume for all views.
Parameters: value (float) – the iso value (a double, between 0 and 1)
-
setIsoValueForView(self, aView: ORSModel.ors.View, value: float) → None¶ Sets the IsoValue of the volume for a given view.
Parameters: - aView (ORSModel.ors.View) – the view (a View)
- value (float) – the iso value (a double, between 0 and 1)
-
setPlaneChannelForView(self, pView: ORSModel.ors.View, pChannel: ORSModel.ors.Channel) → None¶ Parameters: - pView (ORSModel.ors.View) –
- pChannel (ORSModel.ors.Channel) –
-
setProjectionMode(self, iMode: int) → None¶ Sets the projection mode.
Note
See CxvVolumeProjection_Mode in ORS_def.h for supported volume projection modes.
Parameters: iMode (int) – a projection mode (an int)
-
setRenderingEffect(self, effect: ORSModel.ors.RenderingEffect) → None¶ Sets the rendering effect to modify the 2d shader.
Parameters: effect (ORSModel.ors.RenderingEffect) – the effect (a RenderingEffect)
-
setSurfacenessThresholdForAllViews(self, value: float) → None¶ Parameters: value (float) –
-
setSurfacenessThresholdForView(self, aView: ORSModel.ors.View, value: float) → None¶ Parameters: - aView (ORSModel.ors.View) –
- value (float) –
-
setUseHighQualityIn3D(self, value: bool) → None¶ Parameters: value (bool) –
-
setUseTriCubicFilteringIn2D(self, value: bool) → None¶ Parameters: value (bool) –
-
setUseTriCubicFilteringIn3D(self, value: bool) → None¶ Parameters: value (bool) –
-
setWLGammaFactorForView(self, pDisplay: ORSModel.ors.View, dVal: float) → None¶ Sets the window leveling gamma factor for a specific view.
Parameters: - pDisplay (ORSModel.ors.View) – the view (a View)
- dVal (float) – the gamma value (a double)
-
shape¶
-
VisualColorBar¶
-
class
ORSModel.ors.VisualColorBar¶ Bases:
ORSModel.ors.Visualbrief_description: Used to present a ColorBar on the renderer. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2006 see: LookupTable Used to present a color bar on the renderer.
-
getAllViewsUsingLookupTable(self, aLUT: ORSModel.ors.LookupTable) → List¶ Parameters: aLUT (ORSModel.ors.LookupTable) – Returns: output (ORSModel.ors.List) –
-
getBold(self) → bool¶ Gets the bold status of the color bar.
Returns: output (bool) – true if color bar is in bold, false otherwise
-
getBorder(self) → bool¶ Gets the border status of the color bar.
Returns: output (bool) – true if color bar has a border, false otherwise
-
getCanBeVisibleForAllViews(self) → bool¶ Gets whether or not the color bar can be visible.
Returns: output (bool) – true if color bar can be make visible, false otherwise
-
getCanBeVisibleForView(self, pView: ORSModel.ors.View) → bool¶ Gets whether or not the color bar can be visible.
Parameters: pView (ORSModel.ors.View) – Returns: output (bool) – true if color bar can be make visible, false otherwise
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getDecimalPrecision(self) → int¶ Gets the decimal precision of the color bar.
Returns: output (int) – the number of decimal places (an short)
-
getDrawTextShadow(self) → bool¶ Gets if the scale bar is showing text shadow.
Returns: output (bool) – TRUE if text shadows are visible, FALSE otherwise
-
getHeightAsViewFractionForAllViews(self) → float¶ Returns: output (float) –
-
getHeightAsViewFractionForView(self, pView: ORSModel.ors.View) → float¶ Parameters: pView (ORSModel.ors.View) – Returns: output (float) –
-
getIsEnabledForAllViews(self) → bool¶ Returns: output (bool) –
-
getIsEnabledForView(self, pView: ORSModel.ors.View) → bool¶ Parameters: pView (ORSModel.ors.View) – Returns: output (bool) –
-
getIsHorizontal(self) → bool¶ Returns: output (bool) –
-
getIsVertical(self) → bool¶ Returns: output (bool) –
-
getItalic(self) → bool¶ Gets the italic status of the color bar.
Returns: output (bool) – true if color bar is italic, false otherwise
-
getLineThickness(self) → float¶ Returns: output (float) –
-
getLookupTableForAllViews(self) → LookupTable¶ Returns: output (ORSModel.ors.LookupTable) –
-
getLookupTableForView(self, pView: ORSModel.ors.View) → LookupTable¶ Parameters: pView (ORSModel.ors.View) – Returns: output (ORSModel.ors.LookupTable) –
-
getMaxAnchorHighlighted(self) → bool¶ Returns: output (bool) –
-
getMinAnchorHighlighted(self) → bool¶ Returns: output (bool) –
-
getOffset(self) → float¶ Gets the color bar offset.
Returns: output (float) – the offset (a float)
-
getPositionForAllViews(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getPositionForView(self, pView: ORSModel.ors.View) → Vector3¶ Parameters: pView (ORSModel.ors.View) – Returns: output (ORSModel.ors.Vector3) –
-
getRangeDimensionUnitForAllViews(self) → int¶ Returns: output (int) –
-
getRangeDimensionUnitForView(self, pView: ORSModel.ors.View) → int¶ Parameters: pView (ORSModel.ors.View) – Returns: output (int) –
-
getRangeMaxForAllViews(self) → float¶ Returns: output (float) –
-
getRangeMaxForView(self, pView: ORSModel.ors.View) → float¶ Parameters: pView (ORSModel.ors.View) – Returns: output (float) –
-
getRangeMinForAllViews(self) → float¶ Returns: output (float) –
-
getRangeMinForView(self, pView: ORSModel.ors.View) → float¶ Parameters: pView (ORSModel.ors.View) – Returns: output (float) –
-
getSlope(self) → float¶ Gets the color bar slope.
Returns: output (float) – the slope (a float)
-
getTextColor(self) → Color¶ Gets the text color of the color bar.
Returns: output (ORSModel.ors.Color) – a color object (an Color)
-
getTextFontName(self) → str¶ Returns: output (str) –
-
getTextFontSize(self) → float¶ Gets the text font size, in screen one thousandths.
Returns: output (float) – the font size (a double between 0 and 1)
-
getTextMinimumFontSize(self) → int¶ Gets the minimum text font size, in font points.
Returns: output (int) – the font size
-
getTextShadowColor(self) → Color¶ Gets the text shadow color of the color bar.
Returns: output (ORSModel.ors.Color) – a color object (an Color)
-
getTickCount(self) → int¶ Gets the number of visible ticks on the color bar.
Returns: output (int) – the number of ticks (an short)
-
getTransparent(self) → bool¶ Gets the transparency status of the color bar.
Returns: output (bool) – true if color bar is transparent, false otherwise
-
getWidthAsViewFractionForAllViews(self) → float¶ Returns: output (float) –
-
getWidthAsViewFractionForView(self, pView: ORSModel.ors.View) → float¶ Parameters: pView (ORSModel.ors.View) – Returns: output (float) –
-
none()¶ VisualColorBar.__init__() -> VisualColorBar
-
pickAnchor(self, pView: ORSModel.ors.View, xPixelPositionInView: int, yPixelPositionInView: int) → int¶ Parameters: - pView (ORSModel.ors.View) –
- xPixelPositionInView (int) –
- yPixelPositionInView (int) –
Returns: output (int) –
-
setBold(self, value: bool) → None¶ Sets the color bar to be bold or not.
Parameters: value (bool) – TRUE to be in bold, FALSE otherwise
-
setBorder(self, value: bool) → None¶ Sets the color bar to have a border or not.
Parameters: value (bool) – true to have a border, false otherwise
-
setCanBeVisibleForAllViews(self, aValue: bool) → None¶ Sets whether or not the color bar can be visible.
Parameters: aValue (bool) – true if color bar can be make visible, false otherwise
-
setCanBeVisibleForView(self, pView: ORSModel.ors.View, aValue: bool) → None¶ Sets whether or not the color bar can be visible.
Parameters: - pView (ORSModel.ors.View) – true if color bar can be make visible, false otherwise
- aValue (bool) –
-
setCanBeVisibleForViewLogged(view, flag, logging=True)¶
-
setDecimalPrecision(self, value: int) → None¶ Sets the decimal precision of the color bar.
Parameters: value (int) – the number of decimal places (an unsigned short)
-
setDefaultPosition(self, x: float, y: float) → None¶ Sets the default position of the color bar.
Parameters: - x (float) – the X coordinate (a double)
- y (float) – the Y coordinate (a double)
-
setDrawTextShadow(self, bFlag: bool) → None¶ Toggles displaying shadows for the text.
Parameters: bFlag (bool) – true to show text shadows, false otherwise
-
setHeightAsViewFractionForAllViews(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setHeightAsViewFractionForView(self, pView: ORSModel.ors.View, aValue: float) → None¶ Parameters: - pView (ORSModel.ors.View) –
- aValue (float) –
-
setIsEnabledForAllViews(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setIsEnabledForView(self, pView: ORSModel.ors.View, aValue: bool) → None¶ Parameters: - pView (ORSModel.ors.View) –
- aValue (bool) –
-
setIsHorizontal(self, bHorizontal: bool) → None¶ Parameters: bHorizontal (bool) –
-
setItalic(self, value: bool) → None¶ Sets the color bar to be italic or not.
Parameters: value (bool) – true to be italic, false otherwise
-
setLineThickness(self, value: float) → None¶ Parameters: value (float) –
-
setLookupTableForAllViews(self, aLUT: ORSModel.ors.LookupTable) → None¶ Parameters: aLUT (ORSModel.ors.LookupTable) –
-
setLookupTableForView(self, pView: ORSModel.ors.View, aLUT: ORSModel.ors.LookupTable) → None¶ Parameters: - pView (ORSModel.ors.View) –
- aLUT (ORSModel.ors.LookupTable) –
-
setLookupTableForViewLogged(view, lut, logging=True)¶
-
setMaxAnchorHighlighted(self, aFlag: bool) → None¶ Parameters: aFlag (bool) –
-
setMinAnchorHighlighted(self, aFlag: bool) → None¶ Parameters: aFlag (bool) –
-
setOffset(self, anOffset: float) → None¶ Sets the color bar offset.
Parameters: anOffset (float) – the offset (a float)
-
setOrientationToHorizontalForAllViews(self) → None¶
-
setOrientationToHorizontalForView(self, pView: ORSModel.ors.View) → None¶ Parameters: pView (ORSModel.ors.View) –
-
setOrientationToVerticalForAllViews(self) → None¶
-
setOrientationToVerticalForView(self, pView: ORSModel.ors.View) → None¶ Parameters: pView (ORSModel.ors.View) –
-
setPositionForAllViews(self, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: aPoint (ORSModel.ors.Vector3) –
-
setPositionForView(self, pView: ORSModel.ors.View, aPoint: ORSModel.ors.Vector3) → None¶ Set the color bar position in view.
Parameters: - pView (ORSModel.ors.View) – the view
- aPoint (ORSModel.ors.Vector3) –
-
setPositionVerticalForAllViews(self, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: aPoint (ORSModel.ors.Vector3) –
-
setRangeDimensionUnitForAllViews(self, value: int) → None¶ Parameters: value (int) –
-
setRangeDimensionUnitForView(self, pView: ORSModel.ors.View, value: int) → None¶ Parameters: - pView (ORSModel.ors.View) –
- value (int) –
-
setRangeForAllViews(self, min: float, max: float, unit: int) → None¶ Parameters: - min (float) –
- max (float) –
- unit (int) –
-
setRangeForView(self, pView: ORSModel.ors.View, min: float, max: float, unit: int) → None¶ Parameters: - pView (ORSModel.ors.View) –
- min (float) –
- max (float) –
- unit (int) –
-
setSlope(self, aSlope: float) → None¶ Sets the color bar slope.
Parameters: aSlope (float) – the slope (a float)
-
setTextColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the text color of the color bar.
Parameters: IColor (ORSModel.ors.Color) – a color object (an Color) its item color.
-
setTextFontName(self, sFontName: str) → None¶ Sets the text font name.
Parameters: sFontName (str) – the font name (a string)
-
setTextFontSize(self, fontSize: float) → None¶ Sets the text font size, in screen one thousandths.
Parameters: fontSize (float) – the font size (a double between 0 and 1)
-
setTextMinimumFontSize(self, fontSize: int) → None¶ Sets the minimum font size, in font points.
Parameters: fontSize (int) – the font size
-
setTextShadowColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the text shadow color of the color bar.
Parameters: IColor (ORSModel.ors.Color) – a color object (an Color)
-
setTickCount(self, value: int) → None¶ Sets the number of visible ticks on the color bar.
Parameters: value (int) – the number of ticks (an unsigned short)
-
setTransparent(self, value: bool) → None¶ Sets the color bar to be transparent or not.
Parameters: value (bool) – true to be transparent, false otherwise
-
setWidthAsViewFractionForAllViews(self, aValue: float) → None¶ Parameters: aValue (float) –
-
setWidthAsViewFractionForView(self, pView: ORSModel.ors.View, aValue: float) → None¶ Parameters: - pView (ORSModel.ors.View) –
- aValue (float) –
-
updateRampForAllViews(self) → None¶
-
updateRampForView(self, pView: ORSModel.ors.View) → None¶ Parameters: pView (ORSModel.ors.View) –
-
VisualCylinder¶
-
class
ORSModel.ors.VisualCylinder¶ Bases:
ORSModel.ors.VisualShape3D-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCylinder(self, iTIndex: int) → Cylinder¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.Cylinder) –
-
none()¶ VisualCylinder.__init__() -> VisualCylinder
-
setCylinder(self, aCylinder: ORSModel.ors.Cylinder, iTIndex: int) → None¶ Parameters: - aCylinder (ORSModel.ors.Cylinder) –
- iTIndex (int) –
-
VisualGraph¶
-
class
ORSModel.ors.VisualGraph¶ Bases:
ORSModel.ors.Visualbrief_description: A visual that represents a author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: Dec 2017 A visual that represents a VisualGraph.
-
getBoundingBoxPlusEpsilon(timestep, worldMatrix, epsilon=0.01)¶
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCurrentAlphaFuncValue(self) → int¶ Sets the transparency of the graph.
Returns: output (int) – a value from 0 to 255
-
getCurrentEdgeScalarValueMapping(self) → str¶ Gets the current scalar values mapping type for edge.
Note
Graph vertex support “LUT” and “Radius” mapping
Returns: output (str) – the current scalar values edge mapping type
-
getCurrentEdgeScalarValuesSlotForRadius(self) → int¶ Returns: output (int) –
-
getCurrentVertexScalarValueMapping(self) → str¶ Gets the current scalar values mapping type for vertex.
Note
Graph vertex support “LUT” and “Radius” mapping
Returns: output (str) – the current scalar values vertex mapping type
-
getCurrentVertexScalarValuesSlotForRadius(self) → int¶ Returns: output (int) –
-
getEdgesVisibleMax(self) → float¶ Returns: output (float) –
-
getEdgesVisibleMin(self) → float¶ Returns: output (float) –
-
getEdgesWidth(self) → float¶ Returns: output (float) –
-
getOpacity(self) → float¶ Gets the opacity of the graph.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The graph does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Returns: output (float) – the opacity (a float)
-
getOpacityInRange(self) → float¶ Gets the opacity for selected area of the graph.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The graph does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Returns: output (float) – the opacity (a float)
-
getOpacityOutRange(self) → float¶ Gets the opacity for unselected area of the graph.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The graph does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Returns: output (float) – the opacity (a float)
-
getUseEdgeScalarRealScaleForRadius(self) → bool¶ Gets if current scalar values are used as real edge radius size when rendering it.
Returns: output (bool) – true if it use scalar value for the real scale of edge radius
-
getUseLighting(self) → bool¶ Gets the graph lighting mode.
Returns: output (bool) – true if lighting is on, false otherwise
-
getUseVertexScalarRealScaleForRadius(self) → bool¶ Gets if current scalar values are used as real vertex radius size when rendering it.
Returns: output (bool) – true if it use scalar value for the real scale of vertex radius
-
getVertexSizeFactor(self) → float¶ Returns: output (float) –
-
getVertexVisibleMax(self) → float¶ Returns: output (float) –
-
getVertexVisibleMin(self) → float¶ Returns: output (float) –
-
none()¶ VisualGraph.__init__() -> VisualGraph
-
setCurrentEdgeScalarValueMapping(self, sMappingType: str) → None¶ Sets the current scalar values mapping type for edge.
Note
Graph vertex support “LUT” and “Radius” mapping
Parameters: sMappingType (str) – string with the mapping value type
-
setCurrentEdgeScalarValuesSlotForRadius(self, slotIndex: int) → None¶ Parameters: slotIndex (int) –
-
setCurrentVertexScalarValueMapping(self, sMappingType: str) → None¶ Sets the current scalar values mapping type for vertex.
Note
Graph vertex support “LUT” and “Radius” mapping
Parameters: sMappingType (str) – string with the mapping value type
-
setCurrentVertexScalarValuesSlotForRadius(self, slotIndex: int) → None¶ Parameters: slotIndex (int) –
-
setEdgesVisibleMax(self, pValue: float) → None¶ Parameters: pValue (float) –
-
setEdgesVisibleMin(self, pValue: float) → None¶ Parameters: pValue (float) –
-
setEdgesWidth(self, width: float) → None¶ Parameters: width (float) –
-
setOpacity(self, value: float) → None¶ Sets the opacity for unselected range of the graph.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The graph does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Parameters: value (float) – an opacity value (a float)
-
setOpacityInRange(self, value: float) → None¶ Sets the opacity of the graph.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The graph does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Parameters: value (float) – an opacity value (a float)
-
setOpacityOutRange(self, value: float) → None¶ Sets the opacity of the graph.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The graph does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Parameters: value (float) – an opacity value (a float)
-
setShowIn2DDuringMotion(bShow)¶
-
setUseEdgeScalarRealScaleForRadius(self, useRealScale: bool) → None¶ Sets current scalar values as real edge radius size when rendering it.
Parameters: useRealScale (bool) – true to use scalar value for the real scale of edge radius
-
setUseLighting(self, useLighting: bool) → None¶ Sets the graph lighting mode.
Parameters: useLighting (bool) – true to use lighting, false otherwise
-
setUseVertexScalarRealScaleForRadius(self, useRealScale: bool) → None¶ Sets current scalar values as real vextex radius size when rendering it.
Parameters: useRealScale (bool) – true to use scalar value for the real scale of vertex radius
-
setVertexSizeFactor(self, factor: float) → None¶ Parameters: factor (float) –
-
setVertexVisibleMax(self, pValue: float) → None¶ Parameters: pValue (float) –
-
setVertexVisibleMin(self, pValue: float) → None¶ Parameters: pValue (float) –
-
VisualGrid¶
-
class
ORSModel.ors.VisualGrid¶ Bases:
ORSModel.ors.Visualbrief_description: Represents a grid in a display. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: View Represents a grid in the display.
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ VisualGrid.__init__() -> VisualGrid
-
VisualLabel¶
-
class
ORSModel.ors.VisualLabel¶ Bases:
ORSModel.ors.Annotationbrief_description: Represents a label, which is used to associate text to other objects. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Aug 2006
-
getBindedNode(self) → Node¶ Gets the node associated to the label.
Note
A label can thus be associated to any node.
Returns: output (ORSModel.ors.Node) – a node (an Node)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getIsCollapsed(self, iTIndex: int) → bool¶ Gets the label’s collapsed status.
Parameters: iTIndex (int) – Returns: output (bool) – TRUE if label is collapsed, FALSE if it’s expanded
-
getLabelSortMode(self) → int¶ Gets the label sort mode (see note).
Note
3 modes are currently supported:
Returns: output (int) – the sort mode (an short)
-
getLabelTextFontName(self) → str¶ Returns: output (str) –
-
getLabelTextFontSize(self) → int¶ Gets the font size.
Returns: output (int) – the font size (a short)
-
getPickPlusMinus(self, iTIndex: int) → bool¶ Queries the label to know if the plus/minus sign is picked.
Parameters: iTIndex (int) – TRUE if mouse is over the plus/minus sign, FALSE otherwise Returns: output (bool) –
-
getShowLines(self) → bool¶ Gets the label lines visibility.
Note
This represents the line between the label and the object it points to.
Returns: output (bool) – TRUE if lines are shown, FALSE otherwise
-
moveLabelToCursorPositionInDisplay(self, pDisplay: ORSModel.ors.View, pixelXPositionInDisplay: int, pixelYPositionInDisplay: int) → None¶ Moves the label to the current cursor position in a given display.
Parameters: - pDisplay (ORSModel.ors.View) –
- pixelXPositionInDisplay (int) –
- pixelYPositionInDisplay (int) –
-
none()¶ VisualLabel.__init__() -> VisualLabel
-
setForBWRendering(self) → None¶ Sets the Label to be rendered in Black & White.
-
setForNormalRendering(self) → None¶ Sets the Label to be rendered normally.
-
setHasBindedNode(self, bValue: bool) → None¶ Sets the label as being associated to its parent node.
Note
A label can thus be associated to any node.
Parameters: bValue (bool) – TRUE to be associated, FALSE otherwise
-
setIsCollapsed(self, bValue: bool, iTIndex: int) → None¶ Sets the label to be collapsed or expanded.
Parameters: - bValue (bool) – TRUE to collapse the label, FALSE to expand it
- iTIndex (int) –
-
setLabelSortMode(self, iMode: int) → None¶ Sets the label sort mode (see note).
Note
3 modes are currently supported:
Parameters: iMode (int) – the sort mode (an unsigned short)
-
setLabelTextFontName(self, sName: str) → None¶ Sets the text font name of the label.
Parameters: sName (str) – the font name (a string)
-
setLabelTextFontSize(self, pValue: int) → None¶ Sets the font size.
Parameters: pValue (int) – the font size (a short)
-
setPositionInDisplay(self, IDisplay: ORSModel.ors.View, xPos: float, yPos: float) → None¶ Sets the position of the receiver in a given display.
Parameters: - IDisplay (ORSModel.ors.View) – a display (an View)
- xPos (float) – the X position (a double)
- yPos (float) – the Y position (a double)
-
setShowLines(self, value: bool) → None¶ Sets the label lines visibility.
Note
This controls the line between the label and the object it points to.
Parameters: value (bool) – TRUE to show the line, FALSE to hide them
-
VisualLegend¶
-
class
ORSModel.ors.VisualLegend¶ Bases:
ORSModel.ors.VisualColorBarbrief_description: Used to present a legend on the renderer. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2006 see: LookupTable Used to present a legend on the renderer.
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getLabelAtIndex(self, index: int) → str¶ Parameters: index (int) – Returns: output (str) –
-
getLabelCount(self) → int¶ Returns: output (int) –
-
getViewOrderAtIndex(self, index: int) → int¶ Parameters: index (int) – Returns: output (int) –
-
getViewOrderSize(self) → int¶ Returns: output (int) –
-
none()¶ VisualLegend.__init__() -> VisualLegend
-
setLabelAtIndex(self, index: int, label: str) → None¶ Parameters: - index (int) –
- label (str) –
-
setLabelCount(self, labelCount: int) → None¶ Parameters: labelCount (int) –
-
setViewOrderAtIndex(self, index: int, viewOrder: int) → None¶ Parameters: - index (int) –
- viewOrder (int) –
-
setViewOrderSize(self, iNewSize: int) → None¶ Parameters: iNewSize (int) –
-
VisualMesh¶
-
class
ORSModel.ors.VisualMesh¶ Bases:
ORSModel.ors.Visual-
getBoundingBoxPlusEpsilon(timestep, worldMatrix, epsilon=0.01)¶
-
getBuildOctree(self) → bool¶ Returns: output (bool) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCullMode(self) → int¶ Gets the culling mode of the mesh.
Note
See the enum CxvMeshCull_Mode in ORS_def.h for valid values.
Returns: output (int) – the mode (a int32_t)
-
getCurrentAlphaFuncValue(self) → int¶ Sets the transparency of the mesh.
Returns: output (int) – a value from 0 to 255
-
getFillModeForAllViews(self) → int¶ Gets the mesh fill mode.
Note
See the enum CxvMeshFill_Mode in ORS_def.h for valid values.
Returns: output (int) – the fill mode (a int32_t)
-
getFillModeForView(self, pView: ORSModel.ors.View) → int¶ Gets the mesh fill mode.
Note
See the enum CxvMeshFill_Mode in ORS_def.h for valid values.
Parameters: pView (ORSModel.ors.View) – a view (a View) Returns: output (int) – the fill mode (a int32_t)
-
getIsFillModePoint(self, pView: ORSModel.ors.View) → bool¶ Queries the mesh to know if it is in point mode.
Parameters: pView (ORSModel.ors.View) – a view (a View) Returns: output (bool) – true if in point mode, false otherwise
-
getIsFillModeSolid(self, pView: ORSModel.ors.View) → bool¶ Queries the mesh to know if it is in solid mode.
Parameters: pView (ORSModel.ors.View) – a view (a View) Returns: output (bool) – true if in solid mode, false otherwise
-
getIsFillModeWireFrame(self, pView: ORSModel.ors.View) → bool¶ Queries the mesh to know if it is in wire frame mode.
Parameters: pView (ORSModel.ors.View) – Returns: output (bool) – true if wire frame, false otherwise
-
getIsPerVertexTransparent(self) → bool¶ Gets the status of transparency.
Note
If this setting is used, make sure that each vertex has a color defined as RGBA.
Returns: output (bool) – true if the transparency is being read from the RGBA color, false otherwise
-
getIsTransparent(self) → bool¶ Gets the transparency state of the mesh.
Returns: output (bool) – true if mesh is transparent, false otherwise
-
getOpacity(self) → float¶ Gets the opacity of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Returns: output (float) – the opacity (a float)
-
getOpacityInRange(self) → float¶ Gets the opacity for selected area of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Returns: output (float) – the opacity (a float)
-
getOpacityOutRange(self) → float¶ Gets the opacity for unselected area of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Returns: output (float) – the opacity (a float)
-
getShowColorIn2D(self) → bool¶ Returns: output (bool) –
-
getShowIn2DDuringMotion(self) → bool¶ Gets the visibility of the mesh in 2D views during mouse motion.
Returns: output (bool) – true if the mesh is visible in 2D views during mouse movement, false otherwise
-
getThickness(self) → float¶ Gets the thickness of lines in 2D mode.
Returns: output (float) – the thickness, in pixel units (an double)
-
getUseLighting(self) → bool¶ Gets the mesh lighting mode.
Returns: output (bool) – true if lighting is on, false otherwise
-
getWorldTransform(timestep=0)¶ Get the Matrix4x4 for transforming from local to world coordinates
Parameters: timestep (int) – Return: Rtype: ORSModel.ors.Matrix4x4
-
none()¶ VisualMesh.__init__() -> VisualMesh
-
setBuildOctree(self, value: bool) → None¶ Parameters: value (bool) –
-
setCullMode(self, iMode: int) → None¶ Sets the culling mode for the mesh.
Note
See the enum CxvMeshCull_Mode in ORS_def.h for valid values.
Parameters: iMode (int) – a mode (a int32_t*)
-
setCurrentAlphaFuncValue(self, value: int) → None¶ Parameters: value (int) –
-
setFillModeForAllViews(self, pFillMode: int) → None¶ Sets the mesh fill mode.
Note
See the enum CxvMeshFill_Mode in ORS_def.h for valid values.
Parameters: pFillMode (int) – the fill mode (a int32_t*)
-
setFillModeForView(self, pView: ORSModel.ors.View, pFillMode: int) → None¶ Sets the mesh fill mode.
Note
See the enum CxvMeshFill_Mode in ORS_def.h for valid values.
Parameters: - pView (ORSModel.ors.View) – a view (a View)
- pFillMode (int) – the fill mode (a int32_t*)
-
setIsPerVertexTransparent(self, value: bool) → None¶ Sets the transparency to be read from the RGBA vertex color.
Note
If this setting is used, make sure that each vertex has a color defined as RGBA.
Parameters: value (bool) – true to use the transparency from the RGBA color, false to use the global transparency
-
setIsTransparent(self, value: bool) → None¶ Sets the transparency of the mesh.
Parameters: value (bool) – true to make it transparent, false otherwise
-
setOpacity(self, value: float) → None¶ Sets the opacity for unselected range of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Parameters: value (float) – an opacity value (a float)
-
setOpacityInRange(self, value: float) → None¶ Sets the opacity of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Parameters: value (float) – an opacity value (a float)
-
setOpacityOutRange(self, value: float) → None¶ Sets the opacity of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Parameters: value (float) – an opacity value (a float)
-
setShowColorIn2D(self, value: bool) → None¶ Parameters: value (bool) –
-
setShowIn2DDuringMotion(self, pValue: bool) → None¶ Sets the mesh to be visible or not in 2D views, during mouse motion.
Parameters: pValue (bool) – true to have the mesh be visible in 2D views during mouse movement, false otherwise
-
setThickness(self, value: float) → None¶ Sets the thickness of lines in 2D mode.
Parameters: value (float) – the thickness, in pixel units (an double)
-
setUseLighting(self, useLighting: bool) → None¶ Sets the mesh lighting mode.
Parameters: useLighting (bool) – true to use lighting, false otherwise
-
VisualOverlay¶
-
class
ORSModel.ors.VisualOverlay¶ Bases:
ORSModel.ors.Visualbrief_description: Represents a 2D image as a visual in the 3D space. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005 see: VisualText Represents a 2D image as a visual in the 3D space. Textures can come from resources or files. Supported file formats are: bmp, dds, dib, hdr, jpg, pfm, png, ppm and tga.
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getExtent(self) → Vector3¶ Gets the extent of the overlay.
Returns: output (ORSModel.ors.Vector3) – an extent (an Vector3)
-
getExtentInBoundedPlane(self, aBoundedPlane: ORSModel.ors.Rectangle) → Vector3¶ Parameters: aBoundedPlane (ORSModel.ors.Rectangle) – Returns: output (ORSModel.ors.Vector3) –
-
getHighlightedAnchor(self, anchorIndex: int) → bool¶ Parameters: anchorIndex (int) – Returns: output (bool) –
-
getHighlightedAnchorCount(self) → int¶ Returns: output (int) –
-
getHighlightedBorder(self, borderIndex: int) → bool¶ Parameters: borderIndex (int) – Returns: output (bool) –
-
getHighlightedBorderCount(self) → int¶ Returns: output (int) –
-
getIsSelectedAndShapeAndPositionEditionEnabled(self) → bool¶ Returns: output (bool) –
-
getIsShapeAndPositionEditable(self) → bool¶ Returns: output (bool) –
-
getIsShapeAndPositionEditionEnabled(self) → bool¶ Returns: output (bool) –
-
getKeepAspectRatio(self) → bool¶ Returns: output (bool) –
-
getMaximumPixelSize(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getMinimumPixelSize(self) → Vector3¶ Returns: output (ORSModel.ors.Vector3) –
-
getOpacity(self) → float¶ Gets the opacity of the overlay.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Returns: output (float) – the opacity (a float)
-
getOverlayMode(self) → int¶ Returns: output (int) –
-
getPosition(self) → Vector3¶ Gets the position of the overlay.
Returns: output (ORSModel.ors.Vector3) – a position (an Vector3)
-
getPositionInBoundedPlane(self, aBoundedPlane: ORSModel.ors.Rectangle) → Vector3¶ Parameters: aBoundedPlane (ORSModel.ors.Rectangle) – Returns: output (ORSModel.ors.Vector3) –
-
getPreserveGeometry(self) → bool¶ Returns: output (bool) –
-
getRenderingRectangle(self, aView: ORSModel.ors.View) → Rectangle¶ Parameters: aView (ORSModel.ors.View) – Returns: output (ORSModel.ors.Rectangle) –
-
getSelectedColor(self) → Color¶ Gets the selected color of the overlay.
Returns: output (ORSModel.ors.Color) – the color (a Color)
-
getShapeAndPositionEditionAssociatedState(self) → str¶ Returns: output (str) –
-
none()¶ VisualOverlay.__init__() -> VisualOverlay
-
pickAnchor(self, pView: ORSModel.ors.View, xPixelPositionInView: int, yPixelPositionInView: int) → int¶ Parameters: - pView (ORSModel.ors.View) –
- xPixelPositionInView (int) –
- yPixelPositionInView (int) –
Returns: output (int) –
-
pickBorder(self, pView: ORSModel.ors.View, xPixelPositionInView: int, yPixelPositionInView: int) → int¶ Parameters: - pView (ORSModel.ors.View) –
- xPixelPositionInView (int) –
- yPixelPositionInView (int) –
Returns: output (int) –
-
setExtent(self, aVect: ORSModel.ors.Vector3) → None¶ Sets the extent of the overlay.
Parameters: aVect (ORSModel.ors.Vector3) – an extent (an Vector3)
-
setHighlightedAnchor(self, anchorIndex: int) → None¶ Parameters: anchorIndex (int) –
-
setHighlightedBorder(self, borderIndex: int) → None¶ Parameters: borderIndex (int) –
-
setIsShapeAndPositionEditable(self, value: bool) → None¶ Parameters: value (bool) –
-
setIsShapeAndPositionEditionEnabled(self, value: bool) → None¶ Parameters: value (bool) –
-
setKeepAspectRatio(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setMaximumPixelSize(self, aVect: ORSModel.ors.Vector3) → None¶ Parameters: aVect (ORSModel.ors.Vector3) –
-
setMinimumPixelSize(self, aVect: ORSModel.ors.Vector3) → None¶ Parameters: aVect (ORSModel.ors.Vector3) –
-
setOpacity(self, value: float) → None¶ Sets the opacity of the overlay.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Parameters: value (float) – an opacity value (a float)
-
setOverlayMode(self, aMode: int) → None¶ Parameters: aMode (int) –
-
setPosition(self, pPosition: ORSModel.ors.Vector3) → None¶ Sets the position of the overlay.
Parameters: pPosition (ORSModel.ors.Vector3) – a position (an Vector3)
-
setPreserveGeometry(self, aValue: bool) → None¶ Parameters: aValue (bool) –
-
setSelectedColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the selected color of the overlay.
Parameters: IColor (ORSModel.ors.Color) – the color (a Color)
-
setShapeAndPositionEditionAssociatedState(self, aState: str) → None¶ Parameters: aState (str) –
-
unHighlightAllAnchor(self) → None¶
-
unHighlightAllBorder(self) → None¶
-
VisualPath¶
-
class
ORSModel.ors.VisualPath¶ Bases:
ORSModel.ors.Annotationbrief_description: Represents a path. A path is composed of a series of points. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Aug 2006
-
addPathMarker(self, parameter: float, iTIndex: int) → None¶ Parameters: - parameter (float) –
- iTIndex (int) –
-
addPoint(self, pPoint: ORSModel.ors.Vector3, iTIndex: int) → None¶ Adds a point.
Note
Points are manual, while control points are automatic, i.e. the control points will end up generating individual points (on the Bezier curve).
Note
Any change to a primitive should be followed by update() to reflect the changes visually.
Parameters: - pPoint (ORSModel.ors.Vector3) – a point (an Vector3)
- iTIndex (int) –
-
addPointForAllTimeStep(self, pPoint: ORSModel.ors.Vector3) → None¶ Parameters: pPoint (ORSModel.ors.Vector3) –
-
addPointForControlPoint(self, controlPointIndex: int, iTIndex: int, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: - controlPointIndex (int) –
- iTIndex (int) –
- aPoint (ORSModel.ors.Vector3) –
-
applyConvolution(self, aKernel: ORSModel.ors.ConvolutionKernel, timeStep: int) → None¶ Apply the kernel to the path position.
Parameters: - aKernel (ORSModel.ors.ConvolutionKernel) – a one dimension kernel
- timeStep (int) – timestep
-
clearAll(self, iTIndex: int) → None¶ Clears all points and control points.
Note
Any change to a primitive should be followed by update() to reflect the changes visually.
Parameters: iTIndex (int) –
-
clearAllForAllTimeStep(self) → None¶
-
closestPointOnPathInCurvedOnScreen(self, pView: ORSModel.ors.View, pixelXPositionInView: int, pixelYPositionInView: int) → int¶ Parameters: - pView (ORSModel.ors.View) –
- pixelXPositionInView (int) –
- pixelYPositionInView (int) –
Returns: output (int) –
-
getAllCurvedViewsOfPath(self) → List¶ Returns: output (ORSModel.ors.List) –
-
getAllShortAxialViewsOfPath(self) → List¶ Returns: output (ORSModel.ors.List) –
-
getArea(self, iTIndex: int, aWorldTransformMatrix: ORSModel.ors.Matrix4x4) → float¶ Returns the area of the path.
Note
If the path is not closed, this method returns 0
Parameters: - iTIndex (int) –
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (float) – the area of the path (a double)
-
getBezierSamplingLength(self) → float¶ Returns: output (float) –
-
getBuildOctree(self) → bool¶ Returns: output (bool) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getControlPointIndexFromPointIndex(self, id: int, iTIndex: int) → int¶ Parameters: - id (int) –
- iTIndex (int) –
Returns: output (int) –
-
getControlPointPositionsList(self, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, pIndicesArray: ORSModel.ors.ArrayLong) → ArrayDouble¶ Batch gets of given control point’s coordinates by indices.
Note
Points are manual, while control points are automatic, i.e. the control points will end up generating individual points (on the Bezier curve).
Note
Control point indicies are zero based.
Note
If indices array is NULL, this method assumes an array of all indices.
Parameters: - iTIndex (int) – safearray of index of the control point ( int32_t*)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- pIndicesArray (ORSModel.ors.ArrayLong) –
Returns: output (ORSModel.ors.ArrayDouble) – safearray of triplet of the X Y Z position of the point ( double )
-
getControlPointRadiusAtIndex(self, index: int, iTIndex: int) → float¶ Parameters: - index (int) –
- iTIndex (int) –
Returns: output (float) –
-
getCurrentPointIndex(self) → int¶ Returns: output (int) –
-
getDistanceAlongPathBetweenPosition(self, s0: float, s1: float, iTIndex: int) → float¶ Parameters: - s0 (float) –
- s1 (float) –
- iTIndex (int) –
Returns: output (float) –
-
getDistanceBetweenPosition(self, s0: float, s1: float, iTIndex: int, pMatrix: ORSModel.ors.Matrix4x4) → float¶ Parameters: - s0 (float) –
- s1 (float) –
- iTIndex (int) –
- pMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (float) –
-
getHideLine(self) → bool¶ Returns: output (bool) –
-
getHightlightedPathMarkerIndex(self) → int¶ Returns: output (int) –
-
getIndexOfClosestPoint(self, aTransformationMatrix: ORSModel.ors.Matrix4x4, pointToCompareTo: ORSModel.ors.Vector3, iTIndex: int) → int¶ Parameters: - aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- pointToCompareTo (ORSModel.ors.Vector3) –
- iTIndex (int) –
Returns: output (int) –
-
getIndexOfFarthestPoint(self, aTransformationMatrix: ORSModel.ors.Matrix4x4, pointToCompareTo: ORSModel.ors.Vector3, iTIndex: int) → int¶ Parameters: - aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- pointToCompareTo (ORSModel.ors.Vector3) –
- iTIndex (int) –
Returns: output (int) –
-
getIndexOfPathMarkerWithCaption(self, aCaption: str, iTIndex: int) → int¶ Parameters: - aCaption (str) –
- iTIndex (int) –
Returns: output (int) –
-
getIntersectionPointsOfContourForBoundedPlane(self, aBP: ORSModel.ors.Rectangle, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, pfOutputPoints: ORSModel.ors.OrderedCollectionDouble) → OrderedCollectionDouble¶ Parameters: - aBP (ORSModel.ors.Rectangle) –
- iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- pfOutputPoints (ORSModel.ors.OrderedCollectionDouble) –
Returns: output (ORSModel.ors.OrderedCollectionDouble) –
-
getIsBezier(self) → bool¶ Gets the path’s Bezier curve status.
Returns: output (bool) – TRUE if path follows a Bezier curve, FALSE otherwise
-
getIsClosed(self) → bool¶ Gets if the path is closed.
Returns: output (bool) – TRUE if the path is closed, FALSE otherwise
-
getIsNormalsInward(self) → bool¶ Gets if the path has his normals directed inward.
Returns: output (bool) – TRUE if the path his normals directed inward, FALSE otherwise
-
getIsToBeShownInCurvedView(self) → bool¶ Returns: output (bool) –
-
getLength(self, iTIndex: int, aWorldTransformMatrix: ORSModel.ors.Matrix4x4) → float¶ Returns the total length of the path.
Parameters: - iTIndex (int) –
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (float) – the length of the path (a double)
-
getParameterAtControlPointIndex(self, index: int, iTIndex: int) → float¶ Gets the position of a given control point on the path.
Note
This method returns the normalized position (between 0 and 1) of a given control point on the path.
Note
Control point indicies are zero based.
Parameters: - index (int) – the index of the control point (an uint32_t)
- iTIndex (int) –
Returns: output (float) – the position of the given control point (a double, see below)
-
getParameterAtPointIndex(self, index: int, iTIndex: int) → float¶ Gets the position of a given point on the path.
Note
This method returns the normalized position (between 0 and 1) of a given point on the path.
Note
Point indicies are zero based.
Parameters: - index (int) – the index of the point (an uint32_t)
- iTIndex (int) –
Returns: output (float) – the position of the given point (a float, see below)
-
getPathMarkerCaption(self, index: int, iTIndex: int) → str¶ Parameters: - index (int) –
- iTIndex (int) –
Returns: output (str) –
-
getPathMarkerColor(self, index: int, iTIndex: int) → Color¶ Parameters: - index (int) –
- iTIndex (int) –
Returns: output (ORSModel.ors.Color) –
-
getPathMarkerCount(self, iTIndex: int) → int¶ Parameters: iTIndex (int) – Returns: output (int) –
-
getPathMarkerPosition(self, index: int, iTIndex: int) → float¶ Parameters: - index (int) –
- iTIndex (int) –
Returns: output (float) –
-
getPathMarkerReferenceLineIsHightlighted(self) → bool¶ Returns: output (bool) –
-
getPathMarkerReferenceLineOffsetForView(self, pView: ORSModel.ors.View) → int¶ Parameters: pView (ORSModel.ors.View) – Returns: output (int) –
-
getPathMarkerRegionID(self, index: int, iTIndex: int) → int¶ Parameters: - index (int) –
- iTIndex (int) –
Returns: output (int) –
-
getPathMarkerRegionMode(self, index: int, iTIndex: int) → int¶ Parameters: - index (int) –
- iTIndex (int) –
Returns: output (int) –
-
getPathMarkerScalar(self, index: int, scalarIndex: int, iTIndex: int) → float¶ Parameters: - index (int) –
- scalarIndex (int) –
- iTIndex (int) –
Returns: output (float) –
-
getPathMarkerScalarCount(self) → int¶ Returns: output (int) –
-
getPathMarkerVisible(self, index: int, iTIndex: int) → bool¶ Parameters: - index (int) –
- iTIndex (int) –
Returns: output (bool) –
-
getPathPointCenterOfMass(self, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → Vector3¶ Parameters: - iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Vector3) –
-
getPathPointGlobalOrientation(self, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → Vector3¶ Parameters: - iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Vector3) –
-
getPathPoints(self, iTIndex: int) → OrderedCollectionDouble¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.OrderedCollectionDouble) –
-
getPickPathMarker(self, pDisp: ORSModel.ors.View, pixelXPositionInView: int, pixelYPositionInView: int) → int¶ Parameters: - pDisp (ORSModel.ors.View) –
- pixelXPositionInView (int) –
- pixelYPositionInView (int) –
Returns: output (int) –
-
getPointAtIndex(self, index: int, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → Vector3¶ Gets a given point’s coordinates.
Note
Points are manual, while control points are automatic, i.e. the control points will end up generating individual points (on the Bezier curve).
Note
Point indicies are zero based.
Parameters: - index (int) – the index of the point (an uint32_t)
- iTIndex (int) – a transformation matrix (an Matrix4x4)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Vector3) – a point (an Vector3)
-
getPointCount(self, iTIndex: int) → int¶ Gets the number of points.
Parameters: iTIndex (int) – Returns: output (int) – the number of points (an uint32_t)
-
getPointPositionsList(self, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, pnIndexes: ORSModel.ors.ArrayLong) → ArrayDouble¶ Parameters: - iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- pnIndexes (ORSModel.ors.ArrayLong) –
Returns: output (ORSModel.ors.ArrayDouble) –
-
getPositionOnPath(self, parameter: float, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → Vector3¶ Parameters: - parameter (float) –
- iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (ORSModel.ors.Vector3) –
-
getPositionOnPathNearestTo(self, aLocation: ORSModel.ors.Vector3, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → float¶ Parameters: - aLocation (ORSModel.ors.Vector3) –
- iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (float) –
-
getPositionOnViewForCurvedChannel(self, pNormalizedPositionOnPath: float, aView: ORSModel.ors.View, aCurvedChannel: ORSModel.ors.Channel) → Vector3¶ Parameters: - pNormalizedPositionOnPath (float) –
- aView (ORSModel.ors.View) –
- aCurvedChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Vector3) –
-
getPositionOnViewOfControlPointForCurvedChannel(self, controlPointIndex: int, aView: ORSModel.ors.View, aCurvedChannel: ORSModel.ors.Channel) → Vector3¶ Parameters: - controlPointIndex (int) –
- aView (ORSModel.ors.View) –
- aCurvedChannel (ORSModel.ors.Channel) –
Returns: output (ORSModel.ors.Vector3) –
-
getPositionTangentAndNormalOnPath(self, parameter: float, position: ORSModel.ors.Vector3, up: ORSModel.ors.Vector3, right: ORSModel.ors.Vector3, tangent: ORSModel.ors.Vector3, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4) → None¶ Gets the positional, tangent and normal vectors at a given position on the path.
Note
Results are written to the vector arguments.
Note
The first argument should be between 0.0f and 1.0f, with desired level of granulariy.
Note
This method allows one to find the exact location and direction at any given portion of the path.
Parameters: - parameter (float) – a relative position on the path (a float)
- iTIndex (int) – TRUE to get results in world values, FALSE otherwise
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
Returns: - position (ORSModel.ors.Vector3) – the positional vector (an Vector3)
- up (ORSModel.ors.Vector3) – the up vector (an Vector3)
- right (ORSModel.ors.Vector3) – the right vector (an Vector3)
- tangent (ORSModel.ors.Vector3) – the tangent vector (an Vector3)
-
getPositionsOnPath(self, pPositions: ORSModel.ors.ArrayDouble, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, pfOutputPoints: ORSModel.ors.ArrayDouble) → ArrayDouble¶ Parameters: - pPositions (ORSModel.ors.ArrayDouble) –
- iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- pfOutputPoints (ORSModel.ors.ArrayDouble) –
Returns: output (ORSModel.ors.ArrayDouble) –
-
getShowAllIn2D(self) → bool¶ Gets the Show All status of the path.
Note
If the path is set to “ShowAll”, it will be fully visible in 2D but its color will fade towards black as it gets further from the current slice.
Returns: output (bool) – TRUE if the path is shown fully, FALSE otherwise
-
getShowPathMarkerReferenceLine(self) → bool¶ Returns: output (bool) –
-
getTubularMeshFromControlPoints(self, nbPtsCircle: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, offset: float, iTIndex: int, inoutMesh: ORSModel.ors.Mesh) → Mesh¶ Returns a tubular mesh with variable radius, built from the control points.
Parameters: - nbPtsCircle (int) – the number of point on the circumference of the tube
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – create a mesh in local or world coordinate
- offset (float) – an offset to add at the end and beginning of the tube
- iTIndex (int) – Pointer to the mesh
- inoutMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.Mesh) –
-
getTubularMeshFromPoints(self, nbPtsCircle: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, pointSpacing: float, offset: float, iTIndex: int, inoutMesh: ORSModel.ors.Mesh) → Mesh¶ Returns a tubular mesh built from path points.
Parameters: - nbPtsCircle (int) – the number of point on the circumference of the tube
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – create a mesh in local or world coordinate
- pointSpacing (float) – the physical spacing between two points
- offset (float) – an offset to add at the end and beginning of the tube
- iTIndex (int) – Pointer to the mesh
- inoutMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.Mesh) –
-
getTubularMeshWithFixedRadiusFromControlPoints(self, radius: float, nbPtsCircle: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, offset: float, iTIndex: int, inoutMesh: ORSModel.ors.Mesh) → Mesh¶ Returns a tubular mesh built from the control points.
Parameters: - radius (float) – the radius of the mesh double radius (a double)
- nbPtsCircle (int) – the number of points on the circumference of the tube (an unsigned short)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – a transformation matrix
- offset (float) – an offset to add at the end and beginning of the tube (a double)
- iTIndex (int) – T index
- inoutMesh (ORSModel.ors.Mesh) – Pointer to the mesh
Returns: output (ORSModel.ors.Mesh) – Resulting mesh
-
getTubularMeshWithFixedRadiusFromPoints(self, radius: float, nbPtsCircle: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, pointSpacing: float, offset: float, iTIndex: int, inoutMesh: ORSModel.ors.Mesh) → Mesh¶ Returns a tubular mesh built from path points.
Parameters: - radius (float) – the radius of the mesh double radius
- nbPtsCircle (int) – the number of point on the circumference of the tube
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – create a mesh in local or world coordinate
- pointSpacing (float) – the physical spacing between two points
- offset (float) – an offset to add at the end and beginning of the tube
- iTIndex (int) – Pointer to the mesh
- inoutMesh (ORSModel.ors.Mesh) –
Returns: output (ORSModel.ors.Mesh) –
-
insertControlPointForAllTimeStep(self, index: int, pPoint: ORSModel.ors.Vector3) → None¶ Parameters: - index (int) –
- pPoint (ORSModel.ors.Vector3) –
-
insertPathMarker(self, index: int, iTIndex: int, parameter: float, canPassOver: bool) → None¶ Parameters: - index (int) –
- iTIndex (int) –
- parameter (float) –
- canPassOver (bool) –
-
movePathMarker(self, pDisp: ORSModel.ors.View, index: int, pixelXPositionInView: int, pixelYPositionInView: int, canPassOver: bool) → None¶ Parameters: - pDisp (ORSModel.ors.View) –
- index (int) –
- pixelXPositionInView (int) –
- pixelYPositionInView (int) –
- canPassOver (bool) –
-
none()¶ VisualPath.__init__() -> VisualPath
-
rebuildBezier(self, iTIndex: int) → None¶ Rebuilds the Bezier curve.
Parameters: iTIndex (int) –
-
rebuildBezierForAllTimeStep(self) → None¶
-
rebuildNonBezier(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
rebuildNonBezierForAllTimeStep(self) → None¶
-
removeAllPathMarkers(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
removeAllPointsBetweenControlPoint(self, controlPointIndex1: int, controlPointIndex2: int, iTIndex: int) → None¶ Parameters: - controlPointIndex1 (int) –
- controlPointIndex2 (int) –
- iTIndex (int) –
-
removePathMarker(self, index: int, iTIndex: int) → None¶ Parameters: - index (int) –
- iTIndex (int) –
-
reorderPathPointsForWinding(self, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, bCounterClockWise: bool) → None¶ Reorder the points of the path accordingly to the desired winding, for the given orientation.
Parameters: - iTIndex (int) – the T index (a uint32_t)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – the transformation matrix to apply to the points before performing the analysis in the xy plane
- bCounterClockWise (bool) – if true, the points will be reordered to have a counter-clockwise winding; if false, the windinw will be clockwise.
-
resamplePath(self, numberOfTime: int, newPointsCount: int, iTIndex: int) → None¶ Parameters: - numberOfTime (int) –
- newPointsCount (int) –
- iTIndex (int) –
-
setBezierSamplingLength(self, value: float) → None¶ Parameters: value (float) –
-
setBuildOctree(self, value: bool) → None¶ Parameters: value (bool) –
-
setControlPointCount(self, aSize: int, iTIndex: int) → None¶ Sets the number of control points.
Parameters: - aSize (int) – the control points count (an uint32_t)
- iTIndex (int) – the T index (a uint32_t)
-
setControlPointCountForAllTimeStep(self, aSize: int) → None¶ Parameters: aSize (int) –
-
setControlPointPositionsList(self, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, pIndicesArray: ORSModel.ors.ArrayLong, pfPoints: ORSModel.ors.ArrayDouble) → None¶ Batch sets of given control point’s coordinates by indices.
Note
Points are manual, while control points are automatic, i.e. the control points will end up generating individual points (on the Bezier curve).
Note
Control point indicies are zero based.
Note
If indices array is NULL, this method assumes an array of all indices.
Note
Any change to a primitive should be followed by update() to reflect the changes visually.
Parameters: - iTIndex (int) – safearray of index of the control point ( int32_t*)
- aTransformationMatrix (ORSModel.ors.Matrix4x4) – safearray of triplet of the X Y Z position of the point ( float)
- pIndicesArray (ORSModel.ors.ArrayLong) –
- pfPoints (ORSModel.ors.ArrayDouble) –
-
setControlPointRadiusAtIndex(self, index: int, iTIndex: int, radius: float) → None¶ Parameters: - index (int) –
- iTIndex (int) –
- radius (float) –
-
setControlPointRadiusAtIndexForAllTimeStep(self, index: int, radius: float) → None¶ Parameters: - index (int) –
- radius (float) –
-
setFirstUpVector(self, anIVector: ORSModel.ors.Vector3, iTIndex: int) → None¶ Parameters: - anIVector (ORSModel.ors.Vector3) –
- iTIndex (int) –
-
setHideLine(self, value: bool) → None¶ Parameters: value (bool) –
-
setIsBezier(self, value: bool) → None¶ Sets the path to follow a Bezier curve.
Note
Any change to a primitive should be followed by update() to reflect the changes visually.
Parameters: value (bool) – TRUE to make it follow a Bezier curve, FALSE otherwise
-
setIsClosed(self, value: bool) → None¶ Sets the path to be closed or not.
Parameters: value (bool) – TRUE to close the path, FALSE otherwise
-
setIsNormalsInward(self, value: bool) → None¶ Sets the path to have his normals directed inward.
Parameters: value (bool) – TRUE to direct the path normals inward, FALSE to direct them outward
-
setIsToBeShownInCurvedView(self, flag: bool) → None¶ Parameters: flag (bool) –
-
setPathMarkerCaption(self, index: int, iTIndex: int, caption: str) → None¶ Parameters: - index (int) –
- iTIndex (int) –
- caption (str) –
-
setPathMarkerColor(self, index: int, iTIndex: int, IColor: ORSModel.ors.Color) → None¶ Parameters: - index (int) –
- iTIndex (int) –
- IColor (ORSModel.ors.Color) –
-
setPathMarkerPosition(self, index: int, iTIndex: int, parameter: float, canPassOver: bool) → None¶ Parameters: - index (int) –
- iTIndex (int) –
- parameter (float) –
- canPassOver (bool) –
-
setPathMarkerReferenceLineIsHightlighted(self, value: bool) → None¶ Parameters: value (bool) –
-
setPathMarkerReferenceLineOffsetForView(self, pView: ORSModel.ors.View, value: int) → None¶ Parameters: - pView (ORSModel.ors.View) –
- value (int) –
-
setPathMarkerRegionID(self, index: int, iTIndex: int, regionID: int) → None¶ Parameters: - index (int) –
- iTIndex (int) –
- regionID (int) –
-
setPathMarkerRegionMode(self, index: int, iTIndex: int, regionMode: int) → None¶ Parameters: - index (int) –
- iTIndex (int) –
- regionMode (int) –
-
setPathMarkerScalar(self, index: int, scalarIndex: int, iTIndex: int, s: float) → None¶ Parameters: - index (int) –
- scalarIndex (int) –
- iTIndex (int) –
- s (float) –
-
setPathMarkerScalarCount(self, s: int) → None¶ Parameters: s (int) –
-
setPathMarkerVisible(self, index: int, iTIndex: int, s: bool) → None¶ Parameters: - index (int) –
- iTIndex (int) –
- s (bool) –
-
setPointAtIndex(self, index: int, iTIndex: int, pPoint: ORSModel.ors.Vector3) → None¶ Sets a given point’s coordinates.
Note
Points are manual, while control points are automatic, i.e. the control points will end up generating individual points (on the Bezier curve).
Note
Point indicies are zero based.
Note
Any change to a primitive should be followed by update() to reflect the changes visually.
Parameters: - index (int) – the index of the point (an uint32_t)
- iTIndex (int) – a point (an Vector3)
- pPoint (ORSModel.ors.Vector3) –
-
setPointAtIndexForAllTimeStep(self, index: int, pPoint: ORSModel.ors.Vector3) → None¶ Parameters: - index (int) –
- pPoint (ORSModel.ors.Vector3) –
-
setPointPositionsList(self, iTIndex: int, aTransformationMatrix: ORSModel.ors.Matrix4x4, pnIndexes: ORSModel.ors.ArrayLong, pfPoints: ORSModel.ors.ArrayDouble) → None¶ Parameters: - iTIndex (int) –
- aTransformationMatrix (ORSModel.ors.Matrix4x4) –
- pnIndexes (ORSModel.ors.ArrayLong) –
- pfPoints (ORSModel.ors.ArrayDouble) –
-
setShowAllIn2D(self, value: bool) → None¶ Sets the Show All status of the path.
Note
If the path is set to “ShowAll”, it will be fully visible in 2D but its color will fade towards black as it gets further from the current slice.
Parameters: value (bool) – TRUE to set the path to be shown fully, FALSE otherwise
-
setShowPathMarkerReferenceLine(self, value: bool) → None¶ Parameters: value (bool) –
-
VisualPlane¶
-
class
ORSModel.ors.VisualPlane¶ Bases:
ORSModel.ors.VisualShape2D-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getEnabled(self) → bool¶ Returns: output (bool) –
-
getIsClipping(self) → bool¶ Returns: output (bool) –
-
getIsEditable(self) → bool¶ Returns: output (bool) –
-
getOrientedPlane(self, iTIndex: int) → OrientedPlane¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.OrientedPlane) –
-
getShowBorder(self) → bool¶ Returns: output (bool) –
-
none()¶ VisualPlane.__init__() -> VisualPlane
-
setEnabled(self, pFlag: bool) → None¶ Parameters: pFlag (bool) –
-
setIsClipping(self, pFlag: bool) → None¶ Parameters: pFlag (bool) –
-
setIsEditable(self, pFlag: bool) → None¶ Parameters: pFlag (bool) –
-
setOrientedPlane(self, aPlane: ORSModel.ors.OrientedPlane, iTIndex: int) → None¶ Parameters: - aPlane (ORSModel.ors.OrientedPlane) –
- iTIndex (int) –
-
setShowBorder(self, pFlag: bool) → None¶ Parameters: pFlag (bool) –
-
VisualPoints¶
-
class
ORSModel.ors.VisualPoints¶ Bases:
ORSModel.ors.Annotation-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ VisualPoints.__init__() -> VisualPoints
-
VisualROI¶
-
class
ORSModel.ors.VisualROI¶ Bases:
ORSModel.ors.Visual-
fillLookupTableWithLabelColors(self, IStructuredGrid: ORSModel.ors.MultiROI, IView: ORSModel.ors.View, pLUT: ORSModel.ors.LookupTable, labelOffset: int) → None¶ Parameters: - IStructuredGrid (ORSModel.ors.MultiROI) –
- IView (ORSModel.ors.View) –
- pLUT (ORSModel.ors.LookupTable) –
- labelOffset (int) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getColorForAllViews(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getColorForView(self, IView: ORSModel.ors.View) → Color¶ Parameters: IView (ORSModel.ors.View) – Returns: output (ORSModel.ors.Color) –
-
getHighlightOpacityForAllViews(self) → float¶ Returns: output (float) –
-
getHighlightOpacityForView(self, IView: ORSModel.ors.View) → float¶ Parameters: IView (ORSModel.ors.View) – Returns: output (float) –
-
getHighlightOpacityInRangeForAllViews(self) → float¶ Returns: output (float) –
-
getHighlightOpacityInRangeForView(self, IView: ORSModel.ors.View) → float¶ Parameters: IView (ORSModel.ors.View) – Returns: output (float) –
-
getHighlightOpacityOutRangeForAllViews(self) → float¶ Returns: output (float) –
-
getHighlightOpacityOutRangeForView(self, IView: ORSModel.ors.View) → float¶ Parameters: IView (ORSModel.ors.View) – Returns: output (float) –
-
getIsVisibleIn2DForAllViews(self) → bool¶ Returns: output (bool) –
-
getIsVisibleIn2DForView(self, IView: ORSModel.ors.View) → bool¶ Parameters: IView (ORSModel.ors.View) – Returns: output (bool) –
-
getIsVisibleIn3DForAllViews(self) → bool¶ Returns: output (bool) –
-
getIsVisibleIn3DForView(self, IView: ORSModel.ors.View) → bool¶ Parameters: IView (ORSModel.ors.View) – Returns: output (bool) –
-
getLabelColor(self, IStructuredGrid: ORSModel.ors.MultiROI, IView: ORSModel.ors.View, label: int) → Color¶ Parameters: - IStructuredGrid (ORSModel.ors.MultiROI) –
- IView (ORSModel.ors.View) –
- label (int) –
Returns: output (ORSModel.ors.Color) –
-
getPlaneChannelForGUID(self, aGUID: str, createIfAbsent: bool) → Channel¶ Parameters: - aGUID (str) –
- createIfAbsent (bool) –
Returns: output (ORSModel.ors.Channel) –
-
getROIOpacityForAllViews(self) → float¶ Returns: output (float) –
-
getROIOpacityForView(self, IView: ORSModel.ors.View) → float¶ Parameters: IView (ORSModel.ors.View) – Returns: output (float) –
-
getROIOpacityInRangeForAllViews(self) → float¶ Returns: output (float) –
-
getROIOpacityInRangeForView(self, IView: ORSModel.ors.View) → float¶ Parameters: IView (ORSModel.ors.View) – Returns: output (float) –
-
getROIOpacityOutRangeForAllViews(self) → float¶ Returns: output (float) –
-
getROIOpacityOutRangeForView(self, IView: ORSModel.ors.View) → float¶ Parameters: IView (ORSModel.ors.View) – Returns: output (float) –
-
getShowContourForAllViews(self) → bool¶ Returns: output (bool) –
-
getShowContourForView(self, IView: ORSModel.ors.View) → bool¶ Parameters: IView (ORSModel.ors.View) – Returns: output (bool) –
-
getVolumeOpacityForAllViews(self) → float¶ Returns: output (float) –
-
getVolumeOpacityForView(self, IView: ORSModel.ors.View) → float¶ Parameters: IView (ORSModel.ors.View) – Returns: output (float) –
-
none()¶ VisualROI.__init__() -> VisualROI
-
presentInChannel(self, aChannel: ORSModel.ors.Channel, aView: ORSModel.ors.View) → None¶ Parameters: - aChannel (ORSModel.ors.Channel) –
- aView (ORSModel.ors.View) –
-
presentInImage(self, anImage: ORSModel.ors.Image, aView: ORSModel.ors.View) → bool¶ Parameters: - anImage (ORSModel.ors.Image) –
- aView (ORSModel.ors.View) –
Returns: output (bool) –
-
setColorForAllViews(self, color: ORSModel.ors.Color) → None¶ Parameters: color (ORSModel.ors.Color) –
-
setColorForView(self, IView: ORSModel.ors.View, color: ORSModel.ors.Color) → None¶ Parameters: - IView (ORSModel.ors.View) –
- color (ORSModel.ors.Color) –
-
setHighlightOpacityForAllViews(self, opacity: float) → None¶ Parameters: opacity (float) –
-
setHighlightOpacityForView(self, IView: ORSModel.ors.View, opacity: float) → None¶ Parameters: - IView (ORSModel.ors.View) –
- opacity (float) –
-
setHighlightOpacityInRangeForAllViews(self, opacity: float) → None¶ Parameters: opacity (float) –
-
setHighlightOpacityInRangeForView(self, IView: ORSModel.ors.View, opacity: float) → None¶ Parameters: - IView (ORSModel.ors.View) –
- opacity (float) –
-
setHighlightOpacityOutRangeForAllViews(self, opacity: float) → None¶ Parameters: opacity (float) –
-
setHighlightOpacityOutRangeForView(self, IView: ORSModel.ors.View, opacity: float) → None¶ Parameters: - IView (ORSModel.ors.View) –
- opacity (float) –
-
setIsVisibleIn2DForAllViews(self, bValue: bool) → None¶ Parameters: bValue (bool) –
-
setIsVisibleIn2DForView(self, IView: ORSModel.ors.View, bValue: bool) → None¶ Parameters: - IView (ORSModel.ors.View) –
- bValue (bool) –
-
setIsVisibleIn3DForAllViews(self, bValue: bool) → None¶ Parameters: bValue (bool) –
-
setIsVisibleIn3DForView(self, IView: ORSModel.ors.View, bValue: bool) → None¶ Parameters: - IView (ORSModel.ors.View) –
- bValue (bool) –
-
setROIOpacityForAllViews(self, opacity: float) → None¶ Parameters: opacity (float) –
-
setROIOpacityForView(self, IView: ORSModel.ors.View, opacity: float) → None¶ Parameters: - IView (ORSModel.ors.View) –
- opacity (float) –
-
setROIOpacityInRangeForAllViews(self, opacity: float) → None¶ Parameters: opacity (float) –
-
setROIOpacityInRangeForView(self, IView: ORSModel.ors.View, opacity: float) → None¶ Parameters: - IView (ORSModel.ors.View) –
- opacity (float) –
-
setROIOpacityOutRangeForAllViews(self, opacity: float) → None¶ Parameters: opacity (float) –
-
setROIOpacityOutRangeForView(self, IView: ORSModel.ors.View, opacity: float) → None¶ Parameters: - IView (ORSModel.ors.View) –
- opacity (float) –
-
setShowContourForAllViews(self, bValue: bool) → None¶ Parameters: bValue (bool) –
-
setShowContourForView(self, IView: ORSModel.ors.View, bValue: bool) → None¶ Parameters: - IView (ORSModel.ors.View) –
- bValue (bool) –
-
setVolumeOpacityForAllViews(self, opacity: float) → None¶ Parameters: opacity (float) –
-
setVolumeOpacityForView(self, IView: ORSModel.ors.View, opacity: float) → None¶ Parameters: - IView (ORSModel.ors.View) –
- opacity (float) –
-
updateChannel(self, aChannel: ORSModel.ors.Channel, aContourLabelChannel: ORSModel.ors.Channel, aContourChannel: ORSModel.ors.Channel, IView: ORSModel.ors.View, haveToDoAll: bool) → bool¶ Parameters: - aChannel (ORSModel.ors.Channel) –
- aContourLabelChannel (ORSModel.ors.Channel) –
- aContourChannel (ORSModel.ors.Channel) –
- IView (ORSModel.ors.View) –
- haveToDoAll (bool) –
Returns: output (bool) –
-
updateChannel2DForGUIDFromPlane(self, aGUID: str, aBplane: ORSModel.ors.Rectangle, currentTimeStep: int, haveToDoAll: bool) → bool¶ Parameters: - aGUID (str) –
- aBplane (ORSModel.ors.Rectangle) –
- currentTimeStep (int) –
- haveToDoAll (bool) –
Returns: output (bool) –
-
VisualRegion¶
-
class
ORSModel.ors.VisualRegion¶ Bases:
ORSModel.ors.Annotationbrief_description: Represents a user-selected 2D region of a view. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2006 see: View Represents a user-selected 2D region of a view.
-
addRegionIn3DOrthoProjectionToROIIntersectingChannel(self, pCamera: ORSModel.ors.Camera, inside: bool, outputROI: ORSModel.ors.ROI, currentTimeStep: int, intersectingChannel: ORSModel.ors.Channel, levelingMinRange: float, levelingMaxRange: float, ILUT: ORSModel.ors.LookupTable, clipBox: ORSModel.ors.Box) → None¶ Parameters: - pCamera (ORSModel.ors.Camera) –
- inside (bool) –
- outputROI (ORSModel.ors.ROI) –
- currentTimeStep (int) –
- intersectingChannel (ORSModel.ors.Channel) –
- levelingMinRange (float) –
- levelingMaxRange (float) –
- ILUT (ORSModel.ors.LookupTable) –
- clipBox (ORSModel.ors.Box) –
-
addRegionIn3DOrthoProjectionToROIIntersectingLabeldMultiROI(self, pCamera: ORSModel.ors.Camera, inside: bool, outputROI: ORSModel.ors.ROI, currentTimeStep: int, intersectingMultiROI: ORSModel.ors.MultiROI, fHightlightOpacity: float, fHightlightOpacityOutRange: float, clipBox: ORSModel.ors.Box) → None¶ Parameters: - pCamera (ORSModel.ors.Camera) –
- inside (bool) –
- outputROI (ORSModel.ors.ROI) –
- currentTimeStep (int) –
- intersectingMultiROI (ORSModel.ors.MultiROI) –
- fHightlightOpacity (float) –
- fHightlightOpacityOutRange (float) –
- clipBox (ORSModel.ors.Box) –
-
addRegionIn3DOrthoProjectionToROIIntersectingROI(self, pCamera: ORSModel.ors.Camera, inside: bool, outputROI: ORSModel.ors.ROI, currentTimeStep: int, intersectingROI: ORSModel.ors.ROI, clipBox: ORSModel.ors.Box) → None¶ Parameters: - pCamera (ORSModel.ors.Camera) –
- inside (bool) –
- outputROI (ORSModel.ors.ROI) –
- currentTimeStep (int) –
- intersectingROI (ORSModel.ors.ROI) –
- clipBox (ORSModel.ors.Box) –
-
addRegionIn3DPerspectiveProjectionToROIIntersectingChannel(self, pCamera: ORSModel.ors.Camera, inside: bool, outputROI: ORSModel.ors.ROI, currentTimeStep: int, intersectingChannel: ORSModel.ors.Channel, levelingMinRange: float, levelingMaxRange: float, ILUT: ORSModel.ors.LookupTable, clipBox: ORSModel.ors.Box) → None¶ Parameters: - pCamera (ORSModel.ors.Camera) –
- inside (bool) –
- outputROI (ORSModel.ors.ROI) –
- currentTimeStep (int) –
- intersectingChannel (ORSModel.ors.Channel) –
- levelingMinRange (float) –
- levelingMaxRange (float) –
- ILUT (ORSModel.ors.LookupTable) –
- clipBox (ORSModel.ors.Box) –
-
addRegionIn3DPerspectiveProjectionToROIIntersectingLabeldMultiROI(self, pCamera: ORSModel.ors.Camera, inside: bool, outputROI: ORSModel.ors.ROI, currentTimeStep: int, intersectingMultiROI: ORSModel.ors.MultiROI, fHightlightOpacity: float, fHightlightOpacityOutRange: float, clipBox: ORSModel.ors.Box) → None¶ Parameters: - pCamera (ORSModel.ors.Camera) –
- inside (bool) –
- outputROI (ORSModel.ors.ROI) –
- currentTimeStep (int) –
- intersectingMultiROI (ORSModel.ors.MultiROI) –
- fHightlightOpacity (float) –
- fHightlightOpacityOutRange (float) –
- clipBox (ORSModel.ors.Box) –
-
addRegionIn3DPerspectiveProjectionToROIIntersectingROI(self, pCamera: ORSModel.ors.Camera, inside: bool, outputROI: ORSModel.ors.ROI, currentTimeStep: int, intersectingROI: ORSModel.ors.ROI, clipBox: ORSModel.ors.Box) → None¶ Parameters: - pCamera (ORSModel.ors.Camera) –
- inside (bool) –
- outputROI (ORSModel.ors.ROI) –
- currentTimeStep (int) –
- intersectingROI (ORSModel.ors.ROI) –
- clipBox (ORSModel.ors.Box) –
-
fitFromPoints(self, count: int, points: float, iTIndex: int) → None¶ Gets the primitive to fit itself to a list of points.
Note
Points should be supplied in triplets, for respectively the X, Y and Z position.
Parameters: - count (int) – the number of triplets supplied (an uint32_t) (see note below)
- points (float) – an array of points to fit to (a float*)
- iTIndex (int) –
-
getArea(self, timeStep: int, worldTransform: ORSModel.ors.Matrix4x4) → float¶ Parameters: - timeStep (int) –
- worldTransform (ORSModel.ors.Matrix4x4) –
Returns: output (float) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getHistogramData(self, aChannel: ORSModel.ors.Channel, currentTimeStep: int, aWorldTransformMatrix: ORSModel.ors.Matrix4x4, inside: bool, numberOfBins: int) → HistogramData¶ Gets a histogram of the region’s data.
Parameters: - aChannel (ORSModel.ors.Channel) – the channel to use for the data (a Channel)
- currentTimeStep (int) – the time step (an unsigned int)
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) – a transformation matrix (a Matrix4x4)
- inside (bool) – true to use the inside of the region, false to use the outside
- numberOfBins (int) – the number of desired bins (an unsigned short)
Returns: output (ORSModel.ors.HistogramData) – a histogram (an HistogramData)
-
getIsOn3DView(self) → bool¶ Returns: output (bool) –
-
getPerimeter(self, timeStep: int, worldTransform: ORSModel.ors.Matrix4x4) → float¶ Parameters: - timeStep (int) –
- worldTransform (ORSModel.ors.Matrix4x4) –
Returns: output (float) –
-
getShape(self) → int¶ Gets the shape of the region.
Note
See the ORS_def.h file for valid CxvRegion_Shape values.
Returns: output (int) – an CxvRegion_Shape value (an int)
-
insertControlPointForAllTimeStep(self, pPoint: ORSModel.ors.Vector3) → None¶ Parameters: pPoint (ORSModel.ors.Vector3) –
-
none()¶ VisualRegion.__init__() -> VisualRegion
-
setControlPoints(self, pfPoints: ORSModel.ors.ArrayDouble, iTIndex: int) → None¶ Sets the points of the region.
Note
The array should consist of triplets of X, Y and Z positions.
Note
The array is not managed by the underlying object, i.e. you are responsible for releasing it.
Note
Any change to a primitive should be followed by update() to reflect the changes visually.
Parameters: - pfPoints (ORSModel.ors.ArrayDouble) – the number of triplets in the array (a int32_t*)
- iTIndex (int) – an array of point triplets (a float*)
-
setIsOn3DView(self, value: bool) → None¶ Insert a point to the region between the two nearest existing points.
Note
Any change to a primitive should be followed by update() to reflect the changes visually.
Parameters: value (bool) – the point (an Vector3)
-
setPlane(self, a: float, b: float, c: float, d: float, iTIndex: int) → None¶ Sets the plane coefficient.
Note
Planes are expressed by the general equation ax + by + cz + dw = 0.
Parameters: - a (float) – the a member (a float)
- b (float) – the b member (a float)
- c (float) – the c member (a float)
- d (float) – the d member (a float)
- iTIndex (int) –
-
setShape(self, shape: int) → None¶ Sets the shape of the region.
Note
See the ORS_def.h file for valid CxvRegion_Shape values.
Note
Any change to a primitive should be followed by update() to reflect the changes visually.
Parameters: shape (int) – an CxvRegion_Shape value (an int)
-
VisualRuler¶
-
class
ORSModel.ors.VisualRuler¶ Bases:
ORSModel.ors.Annotationbrief_description: Represents a ruler, used to take measures. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Aug 2006
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getLength(self, iTIndex: int, aWorldTransformMatrix: ORSModel.ors.Matrix4x4) → float¶ Gets the length value of the ruler.
Note
The length of the ruler is always returned in meters. You can use a view to convert to other units.
Parameters: - iTIndex (int) –
- aWorldTransformMatrix (ORSModel.ors.Matrix4x4) –
Returns: output (float) – the length of the ruler (a double)
-
getShowTicks(self) → bool¶ Gets the display status of the ruler’s ticks.
Returns: output (bool) – true if ticks are shown, false otherwise
-
getTickCount(self) → int¶ Gets the number of visible ticks on the ruler.
Returns: output (int) – the number of ticks (an uint32_t)
-
none()¶ VisualRuler.__init__() -> VisualRuler
-
setShowTicks(self, value: bool) → None¶ Sets the display of the ruler’s ticks.
Parameters: value (bool) – true to show the ruler’s ticks, false to hide them
-
setTickCount(self, value: int) → None¶ Sets the number of visible ticks on the ruler.
Parameters: value (int) – the number of ticks (an uint32_t)
-
VisualScaleBar¶
-
class
ORSModel.ors.VisualScaleBar¶ Bases:
ORSModel.ors.Visual-
getAutoAdjustFloatingLength(self) → bool¶ Gets if the scalebar auto-adjusts or not.
Returns: output (bool) – TRUE if scale bar auto-adjusts, FALSE otherwise
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getColor(self) → Color¶ Gets the scale bar color.
Returns: output (ORSModel.ors.Color) – a color object (a Color)
-
getDrawTextShadow(self) → bool¶ Gets if the scale bar is showing text shadow.
Returns: output (bool) – TRUE if text shadows are visible, FALSE otherwise
-
getFloatingLength(self) → float¶ Gets the scalebar’s length when floating.
Note
The length is always expressed in meters.
Returns: output (float) – the scale bar length (a double)
-
getIsFloating(self) → bool¶ Gets if the scalebar is floating.
Returns: output (bool) – TRUE if the scale bar is floating, FALSE otherwise
-
getPrecision(self) → int¶ Gets the length precision.
Note
The precision is only used during displaying values, internally full precision is preserved.
Returns: output (int) – a number of decimals (an char)
-
getScaleBarPositionInView(self, pView: ORSModel.ors.View) → Vector3¶ Parameters: pView (ORSModel.ors.View) – Returns: output (ORSModel.ors.Vector3) –
-
getTextColor(self) → Color¶ Gets the text color of the scale bar.
Note
The text color is used for the length.
Returns: output (ORSModel.ors.Color) – a color object (an Color)
-
getTextFontName(self) → str¶ Returns: output (str) –
-
getTextFontSize(self) → float¶ Gets the font size, in screen one thousandths.
Returns: output (float) – the font size (a double between 0 and 1)
-
getTextMinimumFontSize(self) → int¶ Gets the minimum text font size, in font points.
Returns: output (int) – the font size
-
getTextShadowColor(self) → Color¶ Gets the text shadow color of the scale bar.
Returns: output (ORSModel.ors.Color) – a color object (an Color)
-
none()¶ VisualScaleBar.__init__() -> VisualScaleBar
-
setAutoAdjustFloatingLength(self, value: bool) → None¶ Sets if the scalebar auto-adjusts or not.
Parameters: value (bool) – TRUE to have the scale bar auto-adjust, FALSE otherwise
-
setColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the scale bar color.
Parameters: IColor (ORSModel.ors.Color) – a color object (a Color)
-
setDrawTextShadow(self, bFlag: bool) → None¶ Toggles displaying shadows for the text.
Parameters: bFlag (bool) – TRUE to show text shadows, FALSE otherwise
-
setFloatingLength(self, floatLength: float) → None¶ Sets the scalebar’s length when floating.
Note
The length is always expressed in meters.
Parameters: floatLength (float) – the scale bar length (a double)
-
setIsFloating(self, value: bool) → None¶ Sets the scalebar to be floating or not.
Parameters: value (bool) – TRUE so set the scale bar to be floating, FALSE to be normal
-
setPrecision(self, iPrecision: int) → None¶ Sets the length precision.
Note
The precision is only used during displaying values of a floating scale bar, internally full precision is preserved.
Parameters: iPrecision (int) – the number of decimals (an unsigned char)
-
setScaleBarPositionInView(self, pView: ORSModel.ors.View, aPoint: ORSModel.ors.Vector3) → None¶ Parameters: - pView (ORSModel.ors.View) –
- aPoint (ORSModel.ors.Vector3) –
-
setTextColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the text color of the scale bar.
Note
The text color is used for the caption.
Parameters: IColor (ORSModel.ors.Color) – a color object (an Color)
-
setTextFontName(self, sFontName: str) → None¶ Sets the font name.
Parameters: sFontName (str) – the font name (a string)
-
setTextFontSize(self, fontSize: float) → None¶ Sets the font size, in screen one thousandths.
Parameters: fontSize (float) – the font size (a double between 0 and 1)
-
setTextMinimumFontSize(self, fontSize: int) → None¶ Sets the minimum font size, in font points.
Parameters: fontSize (int) – the font size
-
setTextShadowColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the text shadow color of the scale bar.
Parameters: IColor (ORSModel.ors.Color) – a color object (an Color)
-
VisualShape¶
-
class
ORSModel.ors.VisualShape¶ Bases:
ORSModel.ors.Visual-
addAffectedVisual(self, pObject: ORSModel.ors.Managed) → None¶ Parameters: pObject (ORSModel.ors.Managed) –
-
getAffectedVisualsGUID(self) → str¶ Returns: output (str) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getHighlightedAnchor(self, anchorIndex: int, iTIndex: int) → bool¶ Parameters: - anchorIndex (int) –
- iTIndex (int) –
Returns: output (bool) –
-
getHighlightedAnchorCount(self, iTIndex: int) → int¶ Parameters: iTIndex (int) – Returns: output (int) –
-
getHighlightedBorder(self, borderIndex: int, iTIndex: int) → bool¶ Parameters: - borderIndex (int) –
- iTIndex (int) –
Returns: output (bool) –
-
getHighlightedBorderCount(self, iTIndex: int) → int¶ Parameters: iTIndex (int) – Returns: output (int) –
-
getIsInverted(self) → bool¶ Returns: output (bool) –
-
getSelectedColor(self) → Color¶ Gets the selected color of the shape.
Returns: output (ORSModel.ors.Color) – the color (a Color)
-
getShaderCode(self, aView: ORSModel.ors.View, raycastElementId: int, outputElementId: int) → str¶ get the evaluated shader code (in glsl)
Parameters: - aView (ORSModel.ors.View) – the view (a ors::view)
- raycastElementId (int) – raycastElementId: the index of the raycasted element being rendered (int)
- outputElementId (int) – outputElementId: the index of colors[] output register (int)
Returns: output (str) –
-
getShape(self, timestep: int) → Shape¶ Parameters: timestep (int) – Returns: output (ORSModel.ors.Shape) –
-
getShapeAffectsVisual(self, pObject: ORSModel.ors.Managed) → bool¶ Parameters: pObject (ORSModel.ors.Managed) – Returns: output (bool) –
-
getShapeIndex(self) → int¶ Returns: output (int) –
-
none()¶ VisualShape.__init__() -> VisualShape
-
pickAnchor(self, pView: ORSModel.ors.View, xPixelPositionInView: int, yPixelPositionInView: int) → int¶ Parameters: - pView (ORSModel.ors.View) –
- xPixelPositionInView (int) –
- yPixelPositionInView (int) –
Returns: output (int) –
-
pickBorder(self, pView: ORSModel.ors.View, xPixelPositionInView: int, yPixelPositionInView: int) → int¶ Parameters: - pView (ORSModel.ors.View) –
- xPixelPositionInView (int) –
- yPixelPositionInView (int) –
Returns: output (int) –
-
pickSpecificBorder(self, pView: ORSModel.ors.View, borderIndex: int, xPixelPositionInView: int, yPixelPositionInView: int) → bool¶ Parameters: - pView (ORSModel.ors.View) –
- borderIndex (int) –
- xPixelPositionInView (int) –
- yPixelPositionInView (int) –
Returns: output (bool) –
-
removeAffectedVisual(self, pObject: ORSModel.ors.Managed) → None¶ Parameters: pObject (ORSModel.ors.Managed) –
-
setAffectedVisualsGUID(self, guids: str) → None¶ Parameters: guids (str) –
-
setColor(self, color: ORSModel.ors.Color) → None¶ Parameters: color (ORSModel.ors.Color) –
-
setHighlightedAnchor(self, anchorIndex: int, iTIndex: int) → None¶ Parameters: - anchorIndex (int) –
- iTIndex (int) –
-
setHighlightedBorder(self, borderIndex: int, iTIndex: int) → None¶ Parameters: - borderIndex (int) –
- iTIndex (int) –
-
setIsInverted(self, bIsInverted: bool) → None¶ Parameters: bIsInverted (bool) –
-
setSelectedColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the selected color of the shape.
Parameters: IColor (ORSModel.ors.Color) – the color (a Color)
-
setShape(self, aShape: ORSModel.ors.Shape, timestep: int) → None¶ Parameters: - aShape (ORSModel.ors.Shape) –
- timestep (int) –
-
setShapeIndex(self, iIndex: int) → None¶ Parameters: iIndex (int) –
-
unHighlightAllAnchor(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
unHighlightAllBorder(self, iTIndex: int) → None¶ Parameters: iTIndex (int) –
-
VisualShape2D¶
-
class
ORSModel.ors.VisualShape2D¶ Bases:
ORSModel.ors.VisualShapebrief_description: None author: Mathieu Gendron. All other members of ORS participated. version: 1.0 date: November 2017
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ VisualShape2D.__init__() -> VisualShape2D
-
VisualShape3D¶
-
class
ORSModel.ors.VisualShape3D¶ Bases:
ORSModel.ors.VisualShapebrief_description: None author: Mathieu Gendron. All other members of ORS participated. version: 1.0 date: November 2017
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ VisualShape3D.__init__() -> VisualShape3D
-
VisualSphere¶
-
class
ORSModel.ors.VisualSphere¶ Bases:
ORSModel.ors.VisualShape3D-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getSphere(self, iTIndex: int) → Sphere¶ Parameters: iTIndex (int) – Returns: output (ORSModel.ors.Sphere) –
-
none()¶ VisualSphere.__init__() -> VisualSphere
-
setSphere(self, aSphere: ORSModel.ors.Sphere, iTIndex: int) → None¶ Parameters: - aSphere (ORSModel.ors.Sphere) –
- iTIndex (int) –
-
VisualText¶
-
class
ORSModel.ors.VisualText¶ Bases:
ORSModel.ors.Visualbrief_description: To display text on the renderer. author: Eric Fournier. All other members of ORS participated. version: 1.0 date: Jan 2005
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getDrawShadow(self) → bool¶ Returns: output (bool) –
-
getHorizontalAlignment(self) → int¶ Gets the horizontal alignment of the item.
Note
Default value is left-aligned.
Returns: output (int) – 0 for left-aligned, 1 for center-aligned or 2 for right-aligned
-
getIsOriginAtTop(self) → bool¶ Gets whether or not the text is top-aligned.
Note
If not top-aligned, the text is bottom-aligned.
Returns: output (bool) – TRUE if the text is top-aligned, FALSE otherwise
-
getText(self) → str¶ Returns: output (str) –
-
getTextColor(self) → Color¶ Gets the text color of the item.
Returns: output (ORSModel.ors.Color) – a color object (an Color)
-
getTextFontName(self) → str¶ Returns: output (str) –
-
getTextFontSize(self) → float¶ Gets the text font size, in screen one thousandths.
Returns: output (float) – the size (a double between 0 and 1)
-
getTextMinimumFontSize(self) → int¶ Gets the minimum text font size, in font points.
Returns: output (int) – the font size
-
getTextShadowColor(self) → Color¶ Returns: output (ORSModel.ors.Color) –
-
getType(self) → str¶ Returns: output (str) –
-
getU(self) → float¶ Gets the U coordinate of the item.
Note
The U coordinate is same as X coordinate. In this case the coordinate is relative.
Note
Range goes from 0.0 (left) to 1.0 (right).
Note
For left-aligned items, the U coordinates designates the left side. For right-aligned items, it designates the right side. For center-aligned items, it designates the center.
Returns: output (float) – a coordinate (a float)
-
getV(self) → float¶ Gets the V coordinate of the item.
Note
The V coordinate is same as Y coordinate. In this case the coordinate is relative.
Note
Range goes from 0.0 (top) to 1.0 (bottom).
Note
The YPosition is computed to the horizontal center of the text. Hence values of 0.0 or 1.0 are likely to position the text outside of the renderer window (not appearing).
Returns: output (float) – a coordinate (a float)
-
none()¶ VisualText.__init__() -> VisualText
-
setDrawShadow(self, bFlag: bool) → None¶ Parameters: bFlag (bool) –
-
setHorizontalAlignment(self, pValue: int) → None¶ Sets the horizontal item alignment.
Note
Default is left-aligned.
Parameters: pValue (int) – 0 if the text is to be left-aligned, 1 for center-aligned or 2 for right-aligned
-
setIsOriginAtTop(self, pValue: bool) → None¶ Sets whether or not the text is top-aligned.
Note
If not top-aligned, the text is bottom-aligned.
Parameters: pValue (bool) – TRUE if the text is to be top-aligned, FALSE otherwise
-
setText(self, sText: str) → None¶ Sets the text of the item.
Parameters: sText (str) – some text (a string)
-
setTextColor(self, IColor: ORSModel.ors.Color) → None¶ Sets the text color of the item.
Note
If the instance created by an ORSTextPresenter, it will supply its item color.
Parameters: IColor (ORSModel.ors.Color) – a color object (an Color)
-
setTextFontName(self, sName: str) → None¶ Sets the text font name of the item.
Parameters: sName (str) – the font name (a string)
-
setTextFontSize(self, iValue: float) → None¶ Sets the text font size, in screen one thousandths.
Parameters: iValue (float) – the size (a double between 0 and 1)
-
setTextMinimumFontSize(self, fontSize: int) → None¶ Sets the minimum font size, in font points.
Parameters: fontSize (int) – the font size
-
setTextShadowColor(self, IColor: ORSModel.ors.Color) → None¶ Parameters: IColor (ORSModel.ors.Color) –
-
setType(self, aType: str) → None¶ Parameters: aType (str) –
-
setU(self, fValue: float) → None¶ Sets the U coordinate of the item.
Note
The U coordinate is same as X coordinate. In this case the coordinate is relative.
Note
Range goes from 0.0 (left) to 1.0 (right).
Note
For left-aligned items, the U coordinates designates the left side. For right-aligned items, it designates the right side. For center-aligned items, it designates the center.
Parameters: fValue (float) – a coordinate (a float)
-
setV(self, fValue: float) → None¶ Sets the V coordinate of the item.
Note
The V coordinate is same as Y coordinate. In this case the coordinate is relative.
Note
Range goes from 0.0 (top) to 1.0 (bottom).
Note
The YPosition is computed to the horizontal center of the text. Hence values of 0.0 or 1.0 are likely to position the text outside of the renderer window (not appearing).
Parameters: fValue (float) – a coordinate (a float)
-
VisualVectorField¶
-
class
ORSModel.ors.VisualVectorField¶ Bases:
ORSModel.ors.Visualbrief_description: A visual that represents a author: Nicolas Piche. All other members of ORS participated. version: 1.0 date: Dec 2017 A visual that represents a VisualVectorField.
-
getBoundingBoxPlusEpsilon(timestep, worldMatrix, epsilon=0.01)¶
-
getBuildOctree(self) → bool¶ Returns: output (bool) –
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getCurrentAlphaFuncValue(self) → int¶ Sets the transparency of the mesh.
Returns: output (int) – a value from 0 to 255
-
getMaxVectorMagnitude(self) → float¶ Returns: output (float) –
-
getOpacity(self) → float¶ Gets the opacity of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Returns: output (float) – the opacity (a float)
-
getOpacityInRange(self) → float¶ Gets the opacity for selected area of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Returns: output (float) – the opacity (a float)
-
getOpacityOutRange(self) → float¶ Gets the opacity for unselected area of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Returns: output (float) – the opacity (a float)
-
getRenderingColor(self) → Color¶ Gets the rendering color of the vector field.
Returns: output (ORSModel.ors.Color) – the color as an Color object
-
getShowArrowHead(self) → bool¶ Returns: output (bool) –
-
getShowIn2DDuringMotion(self) → bool¶ Gets the visibility of the mesh in 2D views during mouse motion.
Returns: output (bool) – true if the mesh is visible in 2D views during mouse movement, false otherwise
-
getThickness(self) → float¶ Gets the thickness of lines in 2D mode.
Returns: output (float) – the thickness, in pixel units (an double)
-
getUseDirectionAsColor(self) → bool¶ Returns: output (bool) –
-
getUseLighting(self) → bool¶ Gets the mesh lighting mode.
Returns: output (bool) – true if lighting is on, false otherwise
-
getVectorLength(self) → float¶ Gets the visual length of the vectors.
Returns: output (float) – a double value
-
getVectorTransform(self) → Matrix4x4¶ Returns: output (ORSModel.ors.Matrix4x4) –
-
getVectorVisibleMax(self) → float¶ Gets the maximum modulus that will be visible in the field the value is a double.
Returns: output (float) –
-
getVectorVisibleMin(self) → float¶ Gets the minimum modulus that will be visible in the field the value is a double.
Returns: output (float) –
-
none()¶ VisualVectorField.__init__() -> VisualVectorField
-
setBuildOctree(self, value: bool) → None¶ Parameters: value (bool) –
-
setOpacity(self, value: float) → None¶ Sets the opacity for unselected range of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Parameters: value (float) – an opacity value (a float)
-
setOpacityInRange(self, value: float) → None¶ Sets the opacity of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Parameters: value (float) – an opacity value (a float)
-
setOpacityOutRange(self, value: float) → None¶ Sets the opacity of the mesh.
Note
Ranges from 0.0f (no opacity) to 1.0f (100% opacity).
Note
The mesh does not consider any opacity changes unless it is set to be transparent (see setIsTransparent()).
Parameters: value (float) – an opacity value (a float)
-
setRenderingColor(self, aColor: ORSModel.ors.Color) → None¶ set rendering color
Parameters: aColor (ORSModel.ors.Color) –
-
setShowArrowHead(self, bShow: bool) → None¶ Parameters: bShow (bool) –
-
setShowColorIn2D(self, value: bool) → None¶ Parameters: value (bool) –
-
setShowIn2DDuringMotion(bShow)¶
-
setThickness(self, value: float) → None¶ Sets the thickness of lines in 2D mode.
Parameters: value (float) – the thickness, in pixel units (an double)
-
setUseDirectionAsColor(self, bUse: bool) → None¶ Parameters: bUse (bool) –
-
setUseLighting(self, useLighting: bool) → None¶ Sets the mesh lighting mode.
Parameters: useLighting (bool) – true to use lighting, false otherwise
-
setVectorLength(self, pSize: float) → None¶ Sets the visual length of the vectors the value is a double.
Parameters: pSize (float) –
-
setVectorTransform(self, aMatrix: ORSModel.ors.Matrix4x4) → None¶ Parameters: aMatrix (ORSModel.ors.Matrix4x4) –
-
setVectorVisibleMax(self, pValue: float) → None¶ Sets the maximum modulus that will be visible in the field the value is a double.
Parameters: pValue (float) –
-
setVectorVisibleMin(self, pValue: float) → None¶ Sets the minimum modulus that will be visible in the field the value is a double.
Parameters: pValue (float) –
-
Watershed¶
-
class
ORSModel.ors.Watershed¶ Bases:
ORSModel.ors.Unmanaged-
compute(self, watershedDistance: ORSModel.ors.Channel, lOutputChannelLabel: ORSModel.ors.Channel) → None¶ Creates a distance map starting from all the providedROI sources.
Parameters: - watershedDistance (ORSModel.ors.Channel) – the distance map generated by the Dijkstra algorithm (an Channel)
- lOutputChannelLabel (ORSModel.ors.Channel) – a label channel, can be NULL (an Channel)
-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
getNeighborCount(self) → int¶ Gets the number of neighbors used by theDijkstra algorithm (the connectivity).
Note
Can be 6, 18 or 26
Returns: output (int) – the number of neighbors (an char)
-
getROICount(self) → int¶ Returns the number of ROIs that have been set as sources.
Note
A maximum of 10 ROI can be provided.
Returns: output (int) – the number of ROIs that have been provided (an char)
-
getVolumeROI(self, index: int) → ROI¶ Retrieves a particularROI from the index specified slot.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: index (int) – the slot index (an unsigned char) Returns: output (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI), or NULL if no ROI is at that slot
-
none()¶ Watershed.__init__() -> Watershed
-
resetVolumeROIs(self) → None¶ Empties all the sourceROI slots.
-
setInputChannelAndWorkingArea(self, inputChannel: ORSModel.ors.Channel, minX: int, minY: int, minZ: int, maxX: int, maxY: int, maxZ: int, currentT: int) → None¶ Sets the channel that will be used by theDijkstra algorithm to calculate distance.
Note
The min and max boundaries must not describe a space bigger than the input channel.
Parameters: - inputChannel (ORSModel.ors.Channel) – the input channel (an Channel)
- minX (int) – the minimum X index in the input channel (a uint32_t)
- minY (int) – the minimum Y index in the input channel (a uint32_t)
- minZ (int) – the minimum Z index in the input channel (a uint32_t)
- maxX (int) – the maximum X index in the input channel (a uint32_t)
- maxY (int) – the maximum Y index in the input channel (a uint32_t)
- maxZ (int) – the maximum Z index in the input channel (a uint32_t)
- currentT (int) –
-
setInputLabelsChannel(self, aInputLabelsChannel: ORSModel.ors.Channel) → None¶ Parameters: aInputLabelsChannel (ORSModel.ors.Channel) –
-
setInputMultiROI(self, anInputMultiROI: ORSModel.ors.MultiROI) → None¶ Parameters: anInputMultiROI (ORSModel.ors.MultiROI) –
-
setMaskROI(self, IMaskROI: ORSModel.ors.ROI) → None¶ Parameters: IMaskROI (ORSModel.ors.ROI) –
-
setNeighborCountTo18(self) → None¶ Sets the number of neighbors used by theDijkstra algorithm to 18 ( Neighbor distance <= sqrt(2)).
-
setNeighborCountTo26(self) → None¶ Sets the number of neighbors used by theDijkstra algorithm to 18 ( Neighbor distance <= sqrt(2)).
-
setNeighborCountTo6(self) → None¶ Sets the number of neighbors used by theDijkstra algorithm to 18 ( Neighbor distance <= sqrt(2)).
-
setProgressObject(self, IProgress: ORSModel.ors.Progress) → None¶ Parameters: IProgress (ORSModel.ors.Progress) –
-
setVolumeROI(self, index: int, aVolROI: ORSModel.ors.ROI) → None¶ Fills a particularROI slot to be used as a source for the Dijkstra algorithm.
Note
A maximum of 10 ROIs can be provided. The ROIs provided must be of the same shape as the input channel.
Parameters: - index (int) – the slot index (an unsigned short)
- aVolROI (ORSModel.ors.ROI) – the ROI associated with this slot index (an ROI)
-
WatershedOnGrid¶
-
class
ORSModel.ors.WatershedOnGrid¶ Bases:
ORSModel.ors.Watershed-
getClassNameStatic() → str¶ getClassNameStatic
Returns: output (str) –
-
none()¶ WatershedOnGrid.__init__() -> WatershedOnGrid
-
setGridSize(self, xSize: int, ySize: int, zSize: int) → None¶ Parameters: - xSize (int) –
- ySize (int) –
- zSize (int) –
-
Alternative constructors¶
Subclasses of Unmanaged¶
-
ORSModel.__init__.orsColor(r=0, g=0, b=0, a=0)¶
-
ORSModel.__init__.orsVect(x=0, y=0, z=0)¶
-
ORSModel.__init__.orsRect(origin, dir0, dir0Length, dir0Spacing, dir1, dir1Length, dir1Spacing)¶
-
ORSModel.__init__.orsKernel(sizeX, sizeY, sizeZ, *arg)¶
-
ORSModel.__init__.orsBox(origin, dir0, dir0Length, dir0Spacing, dir1, dir1Length, dir1Spacing, dir2, dir2Length, dir2Spacing)¶
-
ORSModel.__init__.orsPlane(a, b, c, d)¶
-
ORSModel.__init__.orsMatrix(v00, v01, v02, v03, v10, v11, v12, v13, v20, v21, v22, v23, v30, v31, v32, v33)¶
-
ORSModel.__init__.orsCamera(dir, pos, up, pivot, vHeight, vWidth, vTopLefX, vTopLeftY, vNear, vFar, useOrtho, orthoZoom, focalLength, depthOfField, angleOfView, normalizationTranslationMatix, normalizationRotationMatix, normalizationScaleMatix)¶
-
ORSModel.__init__.orsOrientedPlane(a, b, c, d, center, up)¶
-
ORSModel.__init__.orsLine(origin, orientation)¶
-
ORSModel.__init__.orsLineSegment(start, end)¶
